汽车远光灯智能避让执行机构系统的研究
2021-08-20汤梓日王文华
汤梓日 王文华

摘要:针对滥用汽车远光灯极易造成交通事以及车灯智能控制的问题,提出一种基于光敏传感器探测与识别车灯进而控制其照射方向的执行机构,设计该执行机构的电路硬件和软件控制逻辑,研究参与控制车灯照射方向的微机系统、机构原理,从而使照明系统智能化,具有可控的照射方向、可控的照射距离;在执行机构控制中以 STM32、AC1003为基础,开发其智能控制算法以及提高通讯效率,实现具有较强可移植性的控制逻辑、以及快速的远光灯智能避让执行机构;最终实现具有较好实用价值的智能化汽车远光灯的执行机构、照明装置及其控制系统。测试结果表明,基于该执行机构的智能避让系统,车灯控制角度误差在7.7%以内,数据通讯的频率从20次/s提高到42次/s ,提高了智能执行机构的速度。
关键词:远光灯;智能避让;执行机构;控制系统
中图分类号:U463.65文献标志码:A文章编号:1009-9492(2021)11-0166-05
Research on Actuator System for Intelligent Avoidance of Automobile HighBeam Light
Tang Ziri,Wang Wenhua※
(School of Electronic and Information Engineering, Guangdong Ocean University, Zhanjiang, Guangdong 524088, China)
Abstract: In order to solve the problem of traffic accident and intelligent control of high beam light, an actuator based on photosensitive sensor was proposed, which was used to detect and identify the light, and then control the direction of illumination. The hardware and software control logic of the actuator were designed, and the principle of microcomputer system and mechanism involved in controlling the direction of illumination was studied, so as to make the light system intelligent, controllable irradiation direction and distance. For the control of actuator, based on STM32 and AC1003, the intelligent control algorithm and the communication efficiency were developed. The control logic with strong portability and the fast high beam intelligent avoidance actuator were realized. Finally, the intelligent high beam actuator, lighting device and control system with good practical value were realized. The test results show that the angle error of high beam light control is less than 7.7%, and the frequency rate of data communication is increased from 20 times/s to 42 times/s, which improves the speed of intelligent actuator.
Key words: high beam light; intelligent avoidance; actuator; control system
0 引言
1886年,煤油燈成为汽车的首款照明系统,其有效距离是1~2 m;1905年,乙炔灯被安装在了轿车上,其照射距离为5m;1925年,白炽灯展开了汽车电气化照明的历史。随着汽车产业的蓬勃发展,车灯也慢慢更新自身的技术,优化其结构和造型,卤素灯、氙气大灯、光导纤维灯、HID (高强度放电灯)灯以及 LED 灯都围绕着亮度与照射距离展开角逐[1]。革命性的设计需要革新的设计,2010年之后出现的转向随动大灯、矩阵大灯,创新性地提出可变照明方向的远光灯系统。朝着可变照明方向和智能化的方向,汽车的照明系统有了极具实用性的、明确的发展方向。智能车灯的研发是车灯技术中的一个方向,智能车灯由微型计算机控制,微型计算机从汽车中的电子传感器获取信息,这些传感器可以辨别各种照明条件[2],进而实现自动控制工作,能够为行人、驾驶员尽可能多地提供帮助[3]。夜晚开车的时候,遇到对面车辆的驾驶员因为赖得切换近光灯或来不及关闭远光灯,由于对面车辆的远光灯光照强度过高而造成人眼瞬间炫目[4],极易引发交通事故。
本文提出一种根据光敏传感器探测前车位置改变照射方向的汽车远光灯智能避让系统,重点研究其执行机构、照明装置及其附属的软硬件。
1 远光灯智能避让基本原理
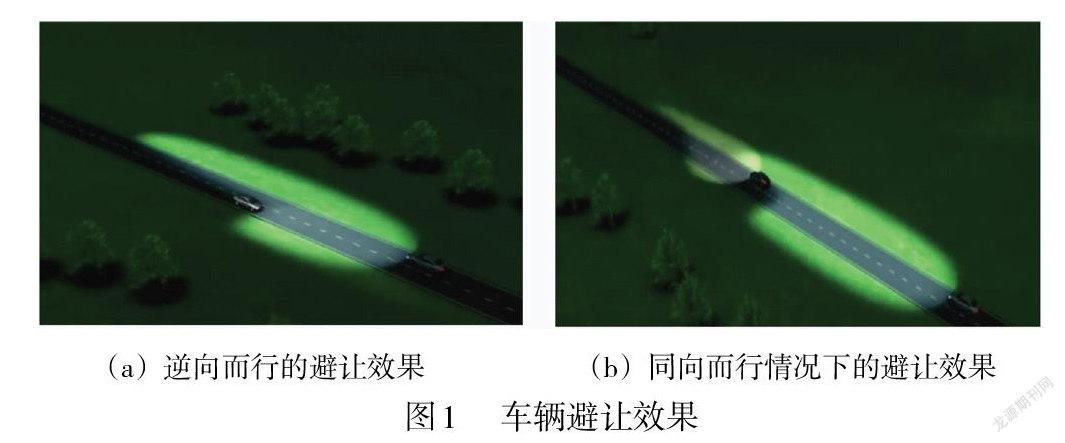
本文的远光灯智能避让是一种模块化的、可不限设备组合的系统,其处理平台为 STM32和 AC1003,辅以 Arduino UNO平台作为对照组[5]。光电传感器扫描车辆的前方,实现对双向车辆车灯光源的自动定向与识别,最终实现对前方车辆远光灯进行自动避让动作的目的,如图1所示,成功避免了驾驶过程中因远光灯而造成的炫目问题。在行驶道路照明不良时,针对前方不同距离车辆对本车光轴夹角的不同以及远光灯指向性较差的问题,设计合理的远光灯智能避让执行机构和照明装置,将大于50m 、15~50 m和小于15 m三种情况分别进行远光灯亮度调节或关闭开启、左右远光灯关闭开启和分区域关闭开启远光灯3种自动避让动作。
本文通过外接的光电传感器探头[6-7]从0°~140°反复旋转探测前方车道上车辆远光灯发出的光束,进而探测其在探头上的光照度[8],经过处理后以串口传输协议的方式发送到处理的主控模块,主控模块根据数据流获取的前车位置启动相应的避让程序,控制执行机构的动作,进而使得有可能对前方同向或逆向车辆驾驶员造成炫目影响的矩阵式大灯定向关闭,达到安全行车的目的,降低因远光灯炫目造成的交通事故发生率。
2 执行机构系统及其相关硬件
2.1 执行机构系统
本文设计的执行机构如图2所示,兼容步进电机、电机、舵机作为驱动源。执行机构包括第一和第二动力源、丝杠固定座、第一和第二丝杠、螺母台、灯架、灯座、万向球、第一和第二转架、第一丝杠固定架;动力源即为步进电机、舵机,或者电机,第一和第二丝杆控制了车灯的照射方向。
执行机构为传感器组件和大灯组件服务[5-6],传感器组件如图3所示,传感器安装底座与支架相连,而支架组件包括与底座固定连接的第一支架、固定在第一支架远离底座的电机安装底座、与传感器固定连接的角度传感器及安装在所述传感器安装座内的光敏二极管;大灯组件通过灯座、用于固定灯座的灯架以及设置在灯架内侧且套接在灯座内的万向球、铰接等部件连接到执行机构,灯座一侧的第一转架、与第一转架铰接的第二转架、套接在第二转架内的第一丝杠及其固定架、与第一丝杠一端连接的第一电机及其螺母台、套接在螺母台内的第二丝杠以及丝杠固定座、驱动第二丝杠的第二电机等部件都是执行机构的具体组成部分,所述大灯组件数量为 n ( n ≥2)。另外,如图4所示,传感器安装座内部水平方向设置有透镜安装孔,安装孔后端设置有聚光孔,聚光孔与透镜安装孔通过锥形孔连通,聚光孔后部还设置有安装光敏二极管的安装孔,安装孔与聚光孔连通,通过对安装座内部结构限制使光敏二极管仅能接收前方0.3°~3°以内的光源;透镜安装孔内装有透镜,透镜选用焦距为10 mm 、半径4.5 mm 、厚度1.5 mm ,透镜安装孔、深度15 mm 、锥形孔深10 mm 、聚光孔、深度2 mm;传感器安装座设置有与传感器电机输出轴连接的驱动孔,用于旋转固定检测传感器安装座角度的角度传感器安装孔。
大灯组件的相对位置如图5所示,灯组一的第一电机和第二电机对应 a ,灯组二的第一电机和第二电机对应 b ,灯组三的第一电机、第二电机对应c。
执行机构在信号处理系统的配合下构成大灯避让系统,具体步骤为:(1) 处理单元通过单片机和第一电机的驱动电路控制传感器安装座在传感器电机驱动下以4 rad/s 转速左右来回转动,扫描前方车辆所处位置;(2) 安装在传感器安装座内的光敏二极管接收前方车辆灯光信号,将光敏二极管接收到的光信号通过 I-V 转换模块传入至处理单元中,I-V 转换模块和处理单元共同控制光敏二极管光线接收强度,同时将角度传感器的角度信号传入至处理单元中;(3)处理单元将角度信号和光信号进行处理分析,判定前方车辆的位置;(4)处理单元将处理后的结果通过第二电机驱动电路、电机选择处理电路控制大灯组件中的第一电机实现灯座上下角度转动,控制第二电机实现灯座左右角度摆动。
2.2 硬件电路与多机通讯设计
执行机构需要在信号处理系统以及匹配的硬件电路辅助下完成大灯避让。
2.2.1 信息流传入电路
本文设计装置的信息流输入电路,指的是STM32获取前车位置的数据流入方式。设计使用4个 IO 口作为通讯口。
表1~2为 STM32的 GPIO 信息传入部分拓展对照图,包括与其他设备通讯的GPIO 口2个,用于控制通讯方式的 GPIO 口1个,另外用于复位本设备的 GPIO 口1个。
2.2.2 电控电路
本文设计将电控电路分为主控、舵机块、照明装置块;块与块之间无法直接通讯,只与主控进行通讯。块被设计为有不重复的 ID 、可多个块连接到同一主控上。
模块的 MCU 使用 AC1003,一款基于 ARM? Cor- tex?-M0+內核[9]的32位微控制器。芯片包含1颗64 K/32 K 字节容量的嵌入式 Flash 存储器、内部8 MHz 晶振。自带有 IIC 、SPI 、UART 和 ADC 、PCA等多种外设,兼容5 V供电。
主控的电路设计中,包含了 STM32的复位电路、晶振电路、DC-DC稳压电路、5 V 网络以及3.3 V 网络。及一些防止静电和电平抖动的电容。此外,当使用 USB供电时电压为5 V ,因此设计使用 XC6206-330进行降压至3.3 V 。主控使用 STM32作为数据处理平台,负责与上位机通讯,获取前车位置数据或直接的模块控制命令。
图6所示为主控的工作原理,其获取来自传感器的前车位置数据,改变参数后,经过判断向外设模块发出转动角度指令。
舵机块具有独立的 MCU (AC1003)以及由 MCU 控制的 SG90舵机。AC1003配合成熟的 Keil μVision 调试开发软件,支持 C 语言及汇编语言在线快速开发与调试。 AC1003在本文设计中使用 I2C硬件,作为从机与主控通讯,并调用定时器中断用于控制 SG90舵机。
图7所示为舵机模块工作原理。IIC数据中包含舵机地址、舵机 ID ,如接收到错误的舵机地址、舵机 ID ,舵机模块的“舵机角度”参数不会被修改。而当接收到地址0XF5后,舵机模块则会返回自身舵机地址、舵机 ID ,以及当前的“舵机角度”参数。
远光灯块的软硬件设计与舵机模块大致相同,不同点在于获取的参数为“灯光亮度”,通过硬件定时器开发了 PWM 调光,灯光控精度达到了128个挡位。
3 软件设计
3.1 执行机构智能动作算法
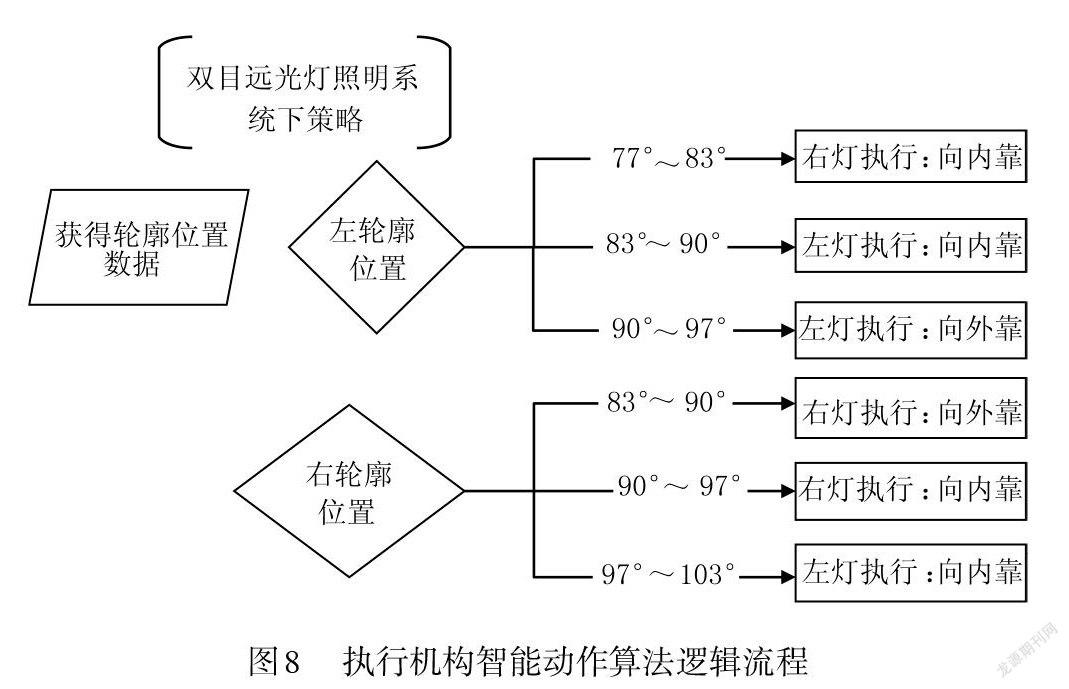
本文的硬件部分由外设的传感器模块、STM32/Arduino模块、灯光控制模块、舵机控制模块组成。其中传感器在程序部分不需要驱动,仅从通讯中获取必要数据,包括前车左侧、右侧轮廓。因此,程序部分包括了对传感器输出数据的记录、滤波,灯光照射区域的控制及其控制策略,策略流程如图8所示。
3.2 通讯方式与环形数据管理
模块和主控的通讯使用 IIC协议,常规情况下 IIC协议同一时间内只能是两台设备之间通讯,不支持同时控制多个 IO 口。本论文设计 IIC 协议使用时间片的方式[10],解决 MCU不能多线程运行的难题。多线程 IIC的实现方式,在一个 SCL电平跳变的区间,轮流控制多个 IO 口的 SDA电平。设计避开了因从机通讯速度的限制,主机需要作出大量等待,产生空闲的等待时间。经过测试,在 STM32F103TB作为处理平台的情况下,IIC通讯速度达到1 Mb/s ,而国产芯片 MM32中为800 kb/s。
图9所示为闭环的模块数据管理方式示意图。弯曲箭头线路表示外接模块的数据传入,即“入环”。在接入多个模块后,主控并非采用“模块邻询”的方式,逐个与模块交换数据,而是所有模块同时进行数据交换,秉着“谁先完成通讯栈,谁入环”原则。入环后,覆盖相同模块类型相同 ID 的数据。
3.3 时间片的多 IO 口 IIC通讯设计
本文提出多线程的 IIC通讯,多个 IO 口可同时进行 IIC通讯,对于单个 IIC通讯接口其速度可达到400 kHz。
(1) 引脚选择函数
在 STM32的 HAL 库中[11],引脚的分配大多在头文件中定义,无法在程序运行过程中及时修改引脚的宏定义。因此,本文为做到同一函数套用到多个 IO 口中,创建了引脚选择函数,使用变量储存引脚地址,代替原有的宏定义方式[12]。
(2) 模块数据更新函数
本文提出一种可移植多种 MCU 平台的 IIC 函数。其基本内容:拉低所有参与 IIC 通讯的 SCL 引脚电平,轮流执行多个 SDA 引脚的 IO 口操作,拉高所有参与 IIC 通讯的 SCL 引脚电平,轮流执行多个 SDA 引脚的IO 口操作。
(3) IO 口操作函数
IO 口操作函数为本文软件的核心部分,此部分封装为一整个函数。函数记录了对应的 IO 口在 IIC协议的通讯中,其对应的时钟片时刻应执行的行为。
比如:IO 口1号在发送完0xF4的地址后,应将 IO 口切换为上拉输入,等待从机下拉完成校验 ACK的动作;而同一时刻,IO 口2号可以处于地址发送的状态中,IO 口3号可以处于读取 IIC从设备返回的某1Bit数据的状态中,做到多个 IO 的 IIC通讯状态互不干扰。
4 系统性能测试与结果
4.1 系统的通讯效率
通讯效率直接影响执行机构的速度。本论文提出模块化的汽车远光灯智能避让的执行机构和照明装置,模块与主控在正常工况下测试模块与主控的通讯速度实验。对常规的 IIC通讯方式和多线程 IIC通讯方式进行测试对比。
(1) 常规 IIC通讯方式
舵机模塊使用的 AC1003处理器,MCU片内硬件 IIC 传速速度最大支持400 kHz 。主控使用的 STM32,在执行 USB CDC中断的情况下,其在单线程执行软件 IIC的情况下传速速度仍达到961 kHz 。完全能满足 AC1003硬件 IIC数据传速峰值速度。此时若采用增加延时的做法降低 IIC通讯速度将浪费 MCU资源,且此做法仅能对 IIC从设备进行邻询访问。结合 AC1003片内硬件 IIC有一定可能故障,IIC主机会因此花费时间重复发送通讯首地址。实际测试中仅能做到20次/s通讯。
(2) 多线程 IIC通讯方式
多线程 IIC通讯方式实际上去掉了常规 IIC通讯中因为从机速度过慢的等待时间,调用此时间执行其他 IO 口上下拉动作。在通讯时序中,获得的通讯频率为42次/s,本文设计开发的的执行机构和照明装置取得了较快的通讯速度和稳定性。
4.2 实车测试
本文提出的汽车远光灯智能避让的执行机构和照明装置,需要一个接近真实使用状况的测试场景。因此在车库中搭建了家用轿车作为检测源的实验环境。在车库中通过实际情况的模拟,对远光灯避让的执行机构进行实机测试,不断优化控制速度以及控制稳定性。
本文实验采用的传感器及照明系统参数如下。探测前车光源方向的传感器,水平方向探测幅度140°,单目,对680 nm 波长的可见光最敏感;ArduinoUNO作为数据处理器,通过 IIC 发送前车左右轮廓数据到 STM32主控。测试品牌:速照,42灯珠,12 V直流供电刹车灯(刹车状态);位置:行车方向正前方,两颗模拟刹车灯间隔1.8 m。
系统执行避让动作后,远光灯照明的实测结果如图11所示,实测结果对应的场景是:正前方约20 m ,左右远光灯各摆动14.9°。在测试中,误差最大的是主控发出执行机构摆动14°时,执行机构摆动了13°,误差约为7.7%。
图10(a)和图10(b)分别为车距较远和车距较近时远光灯的照明情况。当车距较远时,远光灯向居中靠拢,但不照射到前车位置上避免对前车造成灯光炫目;在车距较近时,前车尾灯轮廓占据视场宽度较大,因此远光灯向两侧外扩。
5 结束语
本文对汽车远光灯的智能避让和照明系统进行了阐述,介绍参与车灯照射方向控制的微机系统、机构原理、应用领域及未来的发展趋势;继而提出了一种控制车灯照射方向的执行机构,以及该执行机构的电路硬件与软件控制逻辑,实现了远光灯的智能避让,并分析了控制系统在不同工况下的可用性,得出了具有一定实用价值的智能化汽车远光灯的执行机构、照明装置及其控制机构。测试结果表明,在本文所测的转角中,70 m范围内车灯的控制角度误差在7.7%以内,数据通讯的频率从20次/s提高到42次/s ,提高了智能执行机构的速度。
参考文献:
[1]张宁宁.轿车照明灯造型分析[D].沈阳:东北大学, 2008.
[2] Lark J W. Intelligent Lighting Control System Zone Identification Apparatuses,Systems,AndMethods: US, 20180014381[P].2017-7-7.
[3] Li Lianghui, Wang Jiachen, Yang Shengli, et al. Binocular stereo vision basedilluminance measurement used for intelligent light- ing with LED[J]. Optik,2021(237):166651.
[4]宋洪飞.普通公路会车时不同车速的眩光造成的危害时段分析[J].公路与汽运, 2009(3):50-53.
[5]汤梓日, 张杰波, 田秀云,等.基于光敏传感器的汽车远光灯智能避让系统[J].电子测试,2020(24):13-16.
[6]王文华,汤梓日,张杰波,等.一种远光大灯主动避让系统:中国, 201922121889.x[P].2020-08-21.
[7]王文华, 汤梓日, 张杰波,等.一种远光大灯主动避让系统及其制作方法:中国,201911213166.0[P].2019-12-02.
[8]王庆有.光电传感器与应用技术[M].北京:机械工业出版社,2014.
[9]卢泰均.浅谈 ARM Cortex-M0[J].单片机与嵌入式系统应用, 2010(3):84-85.
[10]汤元斌.多线程模拟进程时间片轮转调度算法研究[J].四川文理学院学报,2014,24(5):76-79.
[11] Anonymous. STMicroelectronics; STMicroelectronics Adds New Library for STM32 MCU, Opening Up New Options for DSP Ap- plication Developers[J]. Electronics Newsweekly,2008:9-14.
[12] Vinh Nguyen, Andrew Dugenske. An I2C based architecture for monitoring legacy manufacturing equipment[J]. Manufacturing Letters, 2018(15):67-70.
第一作者簡介:汤梓日(1998-),男,广东广州人,大学本科,研究领域为电子科学与技术。
※通信作者简介:王文华(1976-),男,福建龙岩人,副教授,研究领域为传感技术。
(编辑:刁少华)
