无人割草机关键技术发展综述
2021-08-19张河宁于涛段馨蕊刘磊邱延涛苏宏岩
张河宁 于涛 段馨蕊 刘磊 邱延涛 苏宏岩


【摘 要】当前,无人驾驶技术的发展推动了无人割草机的完善,使其既满足未来发展的需求,又顺应现代信息技术的发展趋势。现阶段,无人割草机实现了整车智能,通过加装不同的附属模块可实现不同的作业功能,主要具有体积小、轻量化、模块化、电驱动的优势,满足环保要求,实现一机多用途。
【Abstract】At present, the development of unmanned driving technology promotes the improvement of unmanned lawn mower, so that it not only meets the needs of future development, but also conforms to the development trend of modern information technology. At this stage, the unmanned lawn mower has realized the whole vehicle intelligence. It can realize different operation functions by adding different auxiliary modules. It mainly has the advantages of small volume, lightweight, modularization and electric drive. It meets the requirements of environment protection and realizes one machine for multiple purposes.
【关键词】割草机;无人驾驶;附属模块
【Keywords】lawn mower; unmanned driving; auxiliary module
【中图分类号】TU986.3+2 【文献标志码】A 【文章编号】1673-1069(2021)09-0191-03
1 引言
近年来,无人驾驶已经得到社会各方面的关注。当前,国家利好政策的持续出台推动了无人驾驶行业的快速发展,同时,无人割草机的逐步完善使其更好地应用于机场跑道及其他专用场合。随着计算机控制技术的发展,无人割草机与自动控制技术实现了有效融合。
2 国外无人割草机发展现状
自20世纪70年代以来,国外展开对无人割草机的研究与开发,起步较早。就第一台收割谷物并可以割草的机器而言,由人推动机器,通过齿轮带动旋刀割草,这就是割草机的雏形。从畜力到拖拉机配套到无人驾驶领域,割草机在安全性、可靠性等方面取得了重大突破。
3 国内无人割草机发展现状
国内对于无人割草机的研究相对滞后,但也取得了一些成果,主要停留在实验室阶段:
①南京理工大学开发的MORO移动割草机器人,主要导航设备为驱动轮编碼器和磁航向传感器,能自动生成无信标边界并进行全区域覆盖行走。适用于面积较大的草坪的割草工作。
②江苏大学对割草机器人的设计及运动控制方面进行了一些理论研究工作,并研制了一种履带式割草机器人,具有GPS定位导航的功能,介绍资料并不多。
割草机在农业生产中有着重要的作用。发展农业机械化,有利于提高工作效率,提高农业生产率。新型割草机正向着高速、节能的方向发展。
4 整车控制技术
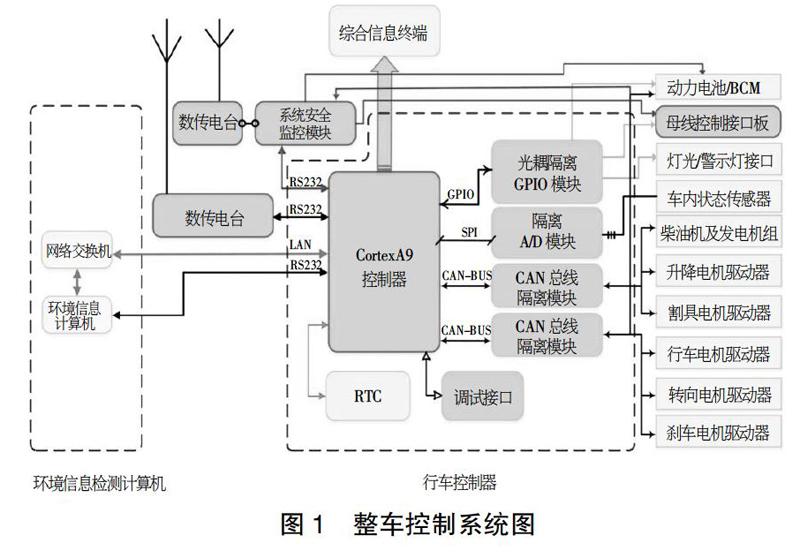
整车控制器主要包括微处理器、能源管理系统、开关量采集模块、开关量输出模块、BDM调试接口、电源模块、模拟量采集模块、模拟量输出模块、PWM输出模块、数据存储模块、无线收发模块及北斗模块。通过集成化设计,运用集成器件代替分立元件进行信号处理和输出,减少电气连接,降低整车控制器工作中产生的电磁干扰,提高整车抗干扰性和可靠性。
整车控制器首先采集整个车辆的各种信号,通过光电隔离的CAN总线连接动力电池BCM模块、液压马达控制器、转向电机驱动器、制动电机驱动器、升降电机驱动器以及发动机等。指令和状态信息走CAN总线通道,由执行元件执行相应动作,如图1所示。
5 液压系统技术
液压系统主要由液压油箱、高压过滤器、高压变量泵、高压柱塞马达、回油过滤器、散热器和液压管路等组成。
通过柴油机作为动力源,为液压系统提供动力。液压系统分为行走液压系统和割具液压系统。
行走液压系统采用闭式液压系统,液压系统油源由高压变量泵供给,经由高压过滤器,到高压柱塞马达执行元件,实现整车的前进和倒退作业。为保证长时间作业的安全性,可在液压系统设置散热器,保证液压系统的油温处于允许范围。
6 驱动系统技术
后桥驱动是将柴油机的动力传递给液压系统来驱动整车运动,如图2所示。它由液压马达、减速器、差速器、左右半轴和刹车总成等组成,可实现半桥差速运动。同时,后桥是用来支撑车架和连接轮辋的中间装置。刚性电驱动桥通过液压马达驱动减速机,传递到差速器、半轴到车轮,实现整车驱动。
刚性电驱桥同时具有制动功能(见图3),通过安装在半轴上的盘式制动结构,实现整车制动。主要由制动盘、分泵、制动钳、油管等总成。
整车制动通过伺服电机带动机械机构控制制动泵,形成制动压力由油管传递到制动钳,制动钳抱死制动盘,实现整车制动。
盘式制动具有散热快、重量轻、构造简单、调整方便的特点。盘式制动的优势在于高负载时耐高温性能好,制动效果稳定,在冬季和恶劣路况下行车,盘式制动比鼓式制动更容易在较短的时间内停车。
7 关键件
无人割草机通常选用柴油机组,由柴油机、散热器、油箱、公共底盘等部件组成,如图4所示。柴油机飞轮与液压泵通过联轴器连接,与减震器共同安装在底盘上,整个机组为一体式结构,便于用户使用和维护。
柴油机为四冲程、水冷、直列高速柴油机,机组配套1块蓄电池。
①核心技术。电控高压共轨。即由ECU电控单元、传感器、执行器组成的先进燃油系统。其中,ECU是“指挥中心”,类似电脑的CPU,通过接收传感器数据来支配执行器(高压油泵、共轨管、喷油器),实现精准控制,使发动机达到最佳工作状态。
②性能优势。无转速波动,稳态调速率≤0.1%;瞬间响应快,瞬态加载能力强,瞬态调速率≤5%;能够实现远程诊断、数据管理、快速分析问题,保证维修成功率。
③可靠性高。燃油三级滤清器系统,适应各种油品状况,总过滤效率达到99.99%,有效保护喷油器、高压油泵等关键部件。进气系统配备93式沙尘滤,彻底消除四配套早磨,杜絕烧机油问题。
8 能源管理系统
能源管理系统是整车控制器中的重要组成部分,能源管理系统主要对整车的能源进行控制管理,根据工作需求对车辆动力系统能源转换装置的输出能量进行协调、分配和控制软、硬件系统。在满足车辆基本技术性能(如动力性)等要求的前提下,根据各能量储存装置、能量转换装置的特性及车辆的运行工况,实现能量在能量转换装置(如发电机、液压马达、储能装置、动力传递装置等)之间按最佳路线流动,使整车的能源利用效率达到最高。能源管理系统是整车车辆的能源控制的核心。
能源管理系统主要由传感器、控制单元ECU和执行元件等组成,通过对传感器的信号进行分析处理,对能源转换装置的工作状态进行优化分析,并向执行元件发出指令,对整车的能源进行控制管理,如图5所示。
9 远程控制平台
远程控制平台采用模块化设计,由多个模块组成,各个模块相对独立,可以按照不同的系统要求进行变更和扩展,也便于维护。项目核心部件均得到各种实际应用的检验,坚固可靠,适用于各种恶劣工作环境。远程监控平台采用了人体工程学设计,不仅易于操作,而且为操作人员带来舒适、方便的操作感受。
远程控制平台的工作原理:通常将客户端程序安装到主控端的电脑上,将服务器端程序安装到被控端的电脑上。使用时客户端程序向被控端电脑中的服务器端程序发出信号,建立一个特殊的远程服务,然后通过这个远程服务,使用各种远程控制功能发送远程控制命令,控制被控端电脑中的各种执行元件进行响应,完成相应作业功能。
9.1 远程监控
远程监控的视频显示可以实现多屏拼接、分屏显示、切换显示等功能,如图6所示。实时地掌握无人割草机的工作状态。
9.2 远程控制
远程控制采用移动遥控操作,如图7所示,可让操作员在室外近距离进行移动操作,可以作为控制设备辅助操作模式。移动遥控器上的显示屏能让操作员及时地掌握场务无人割草机的运行状态。
10 智能控制系统
智能控制系统就是在无人干预的情况下能够自主地驱动机器实现对控制目标的自动控制。
智能控制系统是智能驾驶整车的大脑,主要由智能驾驶控制器、高精度定位模块和环境感知模块等组成,通过采集相关路况信息、高精度定位信号和感知周围环境等,对整车路径进行规划,解决在特定区域内的智能无人驾驶问题。
智能控制主要由于地形、环境和任务的复杂性,而需要每一个分层递阶的系统体系结构,通过人与车辆之间的相互交流,实现智能控制。
11 结语
无人割草机将是未来机场割草发展的方向。随着无人驾驶技术的成熟,无人割草机将发挥更加安全、可靠、高效的作用。减少人工割草,提高割草效率。对于较大的草坪,无人割草机的发展空间更广阔。
【参考文献】
【1】赵静一,姚成玉.我国液压可靠性技术概述[J].液压与气动,2013(10):1-7.
【2】陈慧岩,熊光明,龚建伟,等.无人驾驶汽车概述[M].北京:北京理工大学出版社,2014.
【3】张利平,刘青社.现代液压机研发中的液压系统设计[J].锻压机械,2002(6):7-8+1.
【4】晁智强,宁初明,韩寿松,等.液压系统动态特性研究方法分析[J].液压气动与密封,2014,34(4):21-23.
【5】范士娟,杨超.液压系统故障智能诊断技术现状与发展趋势[J].液压与气动,2010(3):22-26.
【6】机械设计编委会.液压传动与控制[M].北京:机械工业出版社,2014.
