海上试验场目标监测系统设计及应用研究
2021-08-19李明兵齐占辉张东亮李亚文倪晨华石建军
李明兵,齐占辉,王 鑫,张东亮,李亚文,倪晨华,石建军
(国家海洋技术中心,天津 300112)
海上试验场作为海洋观测、监测和调查仪器设备研发、海洋科学研究和海洋可再生能源开发利用的重要试验平台,在推动我国海洋高新技术装备产业链发展,提高海洋观测、监测调查装备业务应用水平方面发挥着重要作用。海上试验中仪器设备安全保障是需要重点关注的问题,试验场海域内设备分布集中,船只的通行以及捕捞作业行为对设备安全构成了重大威胁,因此亟需加强海上试验场的目标监测能力。
近年来,海上目标监测系统的研发和应用取得了显著进步,合成孔径雷达、高频地波雷达、X波段雷达、船舶自动识别系统(Automatic Identification System,AIS)、可见光和热成像等多种监测手段得到了广泛应用。目前较为成熟的海上目标监测系统如加拿大国防部支持的综合海上监视系统(Integrated Maritime Surveillance System,IMS)以高频地波雷达为基础,融合AIS等数据,实现对水上和低空目标的全天候监测。国内的海上目标监测系统多基于X波段导航雷达建设,如海南省与当地企业合作构建的集渔船北斗监控系统、环岛岸基雷达监控系统、渔港视频监控系统于一体的“环岛近海雷达综合监控系统”,通过分布全岛的雷达监测点实现对近海海域的主动实时监控[1-4]。除了常规的岸基监测平台,基于浮标、无人船等海上平台的小型化海上目标监测系统的应用进一步扩大了监测范围,监测方法也从单传感器检测向多源数据融合方向发展,同时深度学习等方法的应用有效提高了海上目标识别准确率[5-7]。
目前,海上目标监测系统主要应用于大范围的目标监测,同时处理目标数目可达十几万个[8],需要较高的硬件配置和大数据处理能力,海上试验场监测范围较小,但是由于试验场海域内设备分布密集而且往往价值昂贵,需要更加精细化的监测能力,同时为了能够对违法破坏行为及时预警和取证,需要系统具备异常行为分析和自动化的跟踪取证能力。另外,受到海上试验场平台安装条件及能源配置限制,监测雷达必须要满足重量轻、功耗低等特点,一般的导航雷达难以满足要求。针对以上需求,本文以国家海洋综合试验场浅海试验场区(威海)为平台设计了海上试验场目标监测系统,通过小型连续波雷达与热成像双光谱云台摄像机联动实现了对试验场海域内设备及船只目标的全天候监测,并围绕海上试验场目标监测系统设计和应用展开分析和讨论。
1 系统组成
海上试验场目标监测系统主要由雷达目标检测模块、目标巡视与取证模块和岸基控制模块3部分组成,如图1所示,其中雷达目标检测模块包括小型连续波雷达、AIS接收机和全球定位系统(Global Positioning System,GPS)导航定向设备等,用于目标检测和数据融合;目标巡视与取证模块包括热成像双光谱云台摄像机、现场数据处理单元、硬盘录像机、网络交换机等,用于海上目标异常行为分析和跟踪取证;岸基控制模块主要包括岸基处理单元,用于目标取证数据的存储和地图定位显示。目标巡视与取证模块和岸基控制模块通过无线移动通信网络传输信息。

图1 海上试验场目标监测系统组成示意图
系统工作流程如图2所示,首先雷达目标检测模块融合雷达、AIS、GPS导航定位等信息得到目标的综合信息,然后目标巡视与取证模块对综合信息进行异常行为分析,并结合GPS导航定位等信息生成摄像机的控制信息,对异常目标行为跟踪取证,取证结果通过无线网络实时发送到岸基控制模块进行存储和显示。

图2 海上试验场目标监测系统工作流程图
除了常规的海上目标监测工作模式,同时设计了设备巡视模式,重点对试验场内设备进行精细化的监测,首先融合设备锚定位置信息和雷达目标检测信息得到所有设备的实时位置,再对每个设备进行进一步的行为分析,通过定时的巡视取证,实现对试验场内设备的全面监测和有效保障。
2 关键技术分析
2.1 基于小型连续波雷达的目标检测及数据融合算法
在海上目标监测中,雷达属于主动探测设备,既可以探测合作目标(加装AIS的船只),也可以探测非合作目标。受到海上平台安装条件及能源配置限制,一般的X波段导航雷达在功耗、体积和重量方面均难以满足要求。本文选用美国Lowrance公司生产的4G小型连续波雷达,该型雷达采用固态发射机和连续波探测技术,拥有极低发射功率。具体工作参数及物理特性如表1所示。

表1 Lowrance 4G雷达工作参数及物理特性
雷达采用双量程工作模式,兼顾近距离试验场内目标高分辨率探测和远距离试验场周边整体态势感知。雷达目标检测主要包括雷达目标提取和AIS与雷达轨迹融合两部分,具体流程如图3所示。

图3 雷达目标检测与数据融合算法流程
在目标提取步骤中,雷达图像由于受到海洋环境和天气变化的影响,图像序列中有的目标时隐时现并伴随一些虚假目标或者建立的目标链可能会因为在某一帧雷达图像中目标的丢失而使目标链断裂,造成目标运动参数计算错误。本文采用卡尔曼滤波算法,通过目标位置预测和状态更新,可以有效地抑制海面浪花等造成的干扰,并结合目标特征匹配实现目标链的持续跟踪[9]。
在AIS与雷达轨迹融合步骤中,首先将基于雷达站心的极坐标数据转换至基于WGS 84(World Geodetic System,1984)坐标系,该坐标系是为GPS的使用而建立的坐标系统,然后采用时间-距离粗关联算法对雷达目标与AIS目标进行匹配,然后采用双门限细关联的方法,从满足粗关联的雷达航迹中,根据门限阈值判断出与AIS航迹满足固定关联的一条雷达信息[10]。最后采用自适应航迹加权融合算法,将二者的航迹信息融合为一条更加准确的、接近运动目标实际轨迹的航迹信息。
2.2 海上试验场目标异常行为分析模型
在海上试验场安全保障中,监控人员重点关注的是试验场设备的在位运行状态,以及可疑船只目标对试验场设备的威胁,因此需要对获取的大量目标信息进行分析识别,重点监测在试验场海域的非法作业和滞留以及异常接近设备的行为,同时布放的设备设施由于受海流的影响也处于不断的漂移中,需要进行精确的位置监测和状态分析。
海上目标异常行为检测目前常用的算法包括基于实例学习的决策树算法、基于概率统计的贝叶斯网络算法和支持向量机算法等,其中决策树算法根据数据的属性采用树状结构建立决策模型。使用决策树进行决策的过程就是从根节点开始,测试待分类项中相应的特征属性,并按照其属性值选择输出分支,直到到达叶子节点,将叶子节点存放的类别作为决策结果。决策树的优点在于决策过程非常直观,可以处理不相干的特征数据,模型可解释[11-13]。
本文采用决策树算法进行异常行为分析,分析流程包括目标行为特征提取、异常行为判别和报警级别分类3个步骤,如图4所示。
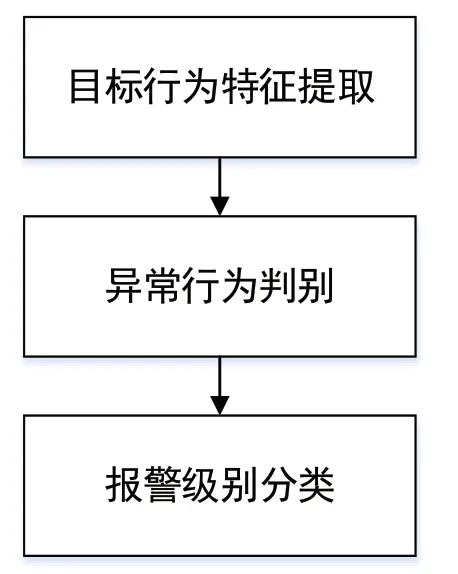
图4 海上目标异常行为分析算法流程
首先提取目标行为的多维度特征,对目标进行画像,包括雷达轨迹、AIS轨迹、停留时间、历史航速、历史航向以及与试验场设备的距离等特征,并基于历史数据建立目标行为特征数据集。
在目标行为判别步骤中,首先对海上试验场的监测目标进行分类,主要分为试验场设备、可疑船只和合作船只3大类,并利用决策树算法判断每一类目标的具体行为,如表2所示。
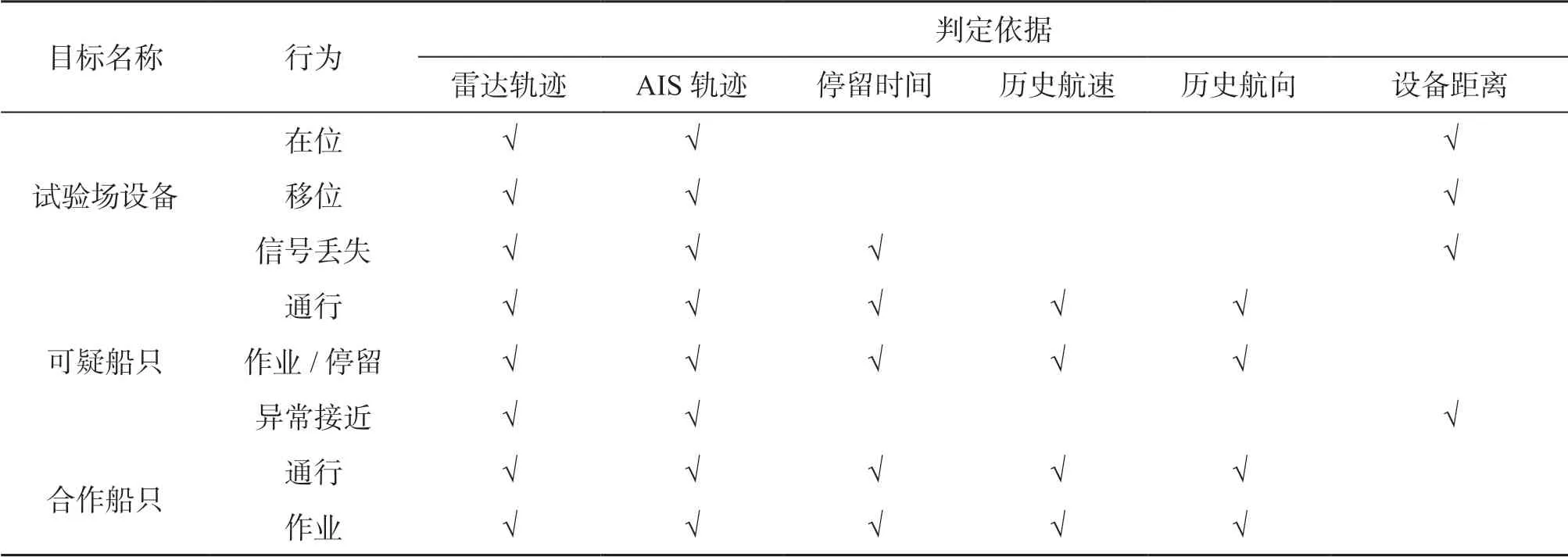
表2 海上试验场目标行为分类及判定依据
简单的目标行为如试验场设备在位状态可以根据目标的轨迹分布范围和与试验场设备锚定位置距离进行识别,对于复杂的目标行为,如可疑船只目标无害通行或捕捞作业判断需要综合多种特征属性。具体每一特征属性的判断阈值依据特征数据集来确定。
根据试验场设备的受威胁程度可分为严重、预警和异常3个报警级别,见表3,对于识别的目标异常行为系统首先进行取证和存储,对于预警和严重级别的报警,系统进一步跟踪监测。通过海上目标异常行为分析,可以实现对海上试验场设备整体状态的实时监测,也有利于对违法破坏行为进行重点监测,提高取证效率。

表3 异常行为报警级别分类
2.3 海上目标跟踪取证算法
对于重点关注的目标,需要通过跟踪取证来对目标行为做进一步地识别。目标跟踪的一般流程是首先确定初始化的目标框,在下一帧中以初始的目标位置为中心,在其周围产生所有候选目标,并提取候选目标的相应特征,再对其进行评分,最后得分最高的候选目标作为最终预测的目标[14]。
本文采用显著性检测算法对目标进行初始定位,再利用核相关滤波算法完成目标跟踪取证,具体流程如图5所示。

图5 基于显著性检测和核相关滤波的目标跟踪取证算法流程
首先根据目标的距离和方位设置云台摄像机的旋转和倾斜角度以及摄像机焦距等参数,由于受海上风浪的影响平台位置处于不断的起伏变化中,因此算法根据平台姿态方位信息来实时地调整云台摄像机的参数,以便获取清晰的目标图像。
在目标初始定位阶段,根据海面目标与背景在颜色上的差异采用显著性检测算法初始化目标框,即利用某个像素和整个图像的平均色的色差来计算显著性值,同时结合高频滤波和形态学分析方法可以有效的定位目标[15-16],显著性值计算公式如下。

式中:S(x,y)代表图像在点(x,y)处的显著性值;Iu代表整幅图像的平均色向量;I(x,y)代表其相应点的颜色向量;|| ||表示在L2空间的距离。本文在L*a*b*彩色空间处理图像,其中L*表示亮度,a*表示红到绿彩色分量,b*表示蓝到黄彩色分量,L*a*b*系统是用来描述人眼可见的所有颜色最完备的色彩模型,在颜色距离计算上与人类感知也更加符合。
海上目标跟踪要求具有较高的实时性,同时船只、浮标目标与整个海面背景图像相比只占据较少比例像素,并且在跟踪过程中其形状特征基本不变,基于以上特点本文采用核相关滤波的目标跟踪算法,该算法将目标跟踪问题看成是目标的分类问题,然后在分类后的结果中找出置信度最大的位置即为当前目标的位置,其计算速度快,而且对目标模型进行实时地学习更新,兼顾了跟踪速度的同时也具备较高的跟踪精度[14,17]。当监测目标超出视野范围时,算法根据雷达目标信息重新调整摄像机参数,并结合历史目标特征和显著性定位结果实现连续的目标跟踪取证。
3 系统应用
3.1 海上试验场现场应用
海上试验场目标监测系统在国家海洋综合试验场浅海试验场区(威海)进行了长期的应用测试,该系统安装在“国海试1号”海上综合试验平台上,如图6(a)所示。试验场海域使用确权面积为5 km2,测试期间在位运行设备主要包括综合试验平台、警示浮标、背景场观测浮标、试验浮标和海洋能发电装置等试验设备。
经过近两个月的现场应用,系统对于复杂海洋环境的适应性、清晰取证能力以及各功能模块的可靠性都得到了充分验证,系统能够准确识别试验场在位运行设备并对可疑船只目标跟踪取证。图6(b)为某时刻雷达目标检测运行界面,图6(c)为目标取证运行界面,图6(d)为岸基显示运行界面。

图6 海上试验场目标监测系统现场安装及运行情况
3.2 试验场设备监测
目前试验场内布放设备均采用定点系留方式,图7为在1 h内试验场设备的监测轨迹分布情况,图中红色为雷达监测轨迹,绿色为AIS监测轨迹,蓝色虚线为试验场范围。由于试验场设备受海流影响位置处于不断变动中,仅仅依据目标锚定信息无法有效捕捉目标,同时大部分试验设备未安装AIS装置,因此主要通过雷达监测设备状态。

图7 试验场设备1h内监测轨迹分布情况示意图
从图7中轨迹分布情况来看,目标监测系统能够准确识别试验场在位运行设备的位置,选取装有AIS设备的警示浮标和背景场观测浮标,分析同步监测的雷达轨迹与AIS轨迹(如图8所示),以AIS探测位置为基准值,雷达监测位置偏差的平均值、标准差和最大值统计结果如表4所示。根据监测轨迹和统计结果,雷达监测位置平均偏差在30 m以内,位置分布比较集中,其中最大偏差值较大主要是由于浮标附近船只目标遮挡造成的误检。根据现场取证效果,监测精度能够满足系统取证和识别需求,热成像和可见光取证图像如图8所示。

表4 试验场设备监测位置偏差统计分析

图8 试验场设备图像及轨迹监测
从图7中同时发现试验浮标有移位现象,通过前后取证图像对比及轨迹分析,如图9所示,判断在该时间段内合作船只对试验浮标进行了维护作业,试验浮标由锚系状态变为随船漂流状态。

图9 试验浮标设备移位监测
3.3 可疑船只目标监测
试验场海域内活动的船只以小型渔船为主且大部分未安装AIS设备,海上试验场目标监测系统根据目标轨迹、停留时间、历史航速和航向等多种特征属性分析目标异常行为并跟踪取证,根据监测数据统计,无害通行的船只一般停留时间较短,并且航速和航向基本不变,捕捞作业的船只船速较低,并且有往返活动现象,如图10所示。
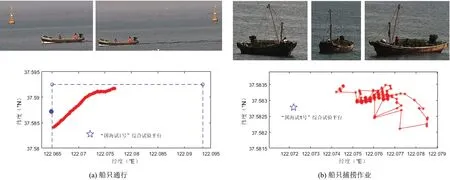
图10 可疑船只目标监测示例
4 结 论
本文以国家海洋综合试验场浅海试验场区(威海)为平台设计了海上试验场目标监测系统,开发了基于小型连续波雷达的目标检测和与数据融合算法,建立了针对海上试验场目标的异常行为分析模型和基于显著性检测和核相关滤波的目标跟踪取证算法,实现了试验场海域内设备及船只目标的全天候自动监测取证。系统应用结果表明,海上试验场目标监测系统能够准确识别试验场设备位置并实时监测设备在位状态,同时对于进入试验场的可疑船只目标行为能够准确识别并跟踪取证。
在下一步的研究工作中,一方面利用深度学习方法对海上目标行为进行识别,进一步提高异常行为识别准确率,另一方面结合短信报警、声光报警等多种方式建立有效的预警报系统,对监测目标的异常行为及时响应,为海上试验场安全保障提供有效支撑。
