UCTD探头阻力系数的数值分析及试验研究
2021-08-19许丽萍
许丽萍,兰 卉,田 雨,高 坤,张 挺
(国家海洋技术中心,天津 300112)
船载温盐垂直剖面测量设备主要有定点温盐深剖面仪和投弃式温盐深剖面仪,以及以SeaSoar为代表的多参数拖曳测量系统和走航式垂直剖面测 量 系 统(Moving Vessel Profiler,MVP)以 及UCTD等。定点式温盐深测量仪只是在船只停止航行时人为控制作业,测量点位准确,但耗费船时、测量效率低下。投弃式温盐深仪测量剖面接近垂直,虽可在航行中使用,但由于不可回收,即使制造成本已得到控制,使用成本仍较高。多参数拖曳测量系统(如SeaSoar)可实现连续的锯齿形测量剖面,既可在航测量,也可重复使用,并且可搭载多种传感器,实现多参数测量。但多参数拖曳测量系统尺寸,尤其是所用绞车尺寸较大,系统也很复杂,船只不能同时拖曳其他仪器,投放和回收过程繁杂而费力。当为了达到300 m以上深度而在拖曳缆上安装导流片时,更增加了操作的复杂度。加拿大研发的MVP通过不断释放和收回绞车上的缆绳,可使其测量剖面接近垂直,且在船只航行同样距离时,可测量更多的剖面。但与SeaSoar相仿,该系统同样体积较大,系统复杂度高,造价昂贵,只适合在大型船舶或专用调查船上安装,无法适应于经济、小型化的无人船上应用。
近年来,国外发展出了一种新型的走航式海洋调查设备——UCTD。UCTD由甲板设备和探头两部分组成,探头部分体积小而轻便,甲板设备有电动绞车和绕线机。UCTD工作方式与MVP类似,但是其自动化程度较低,系统不能自动出缆和回收,且调查数据不能实时读取,每隔一定时间后把探头取上来读取内存数据。国家863计划在“十一五” 海洋技术领域区域性海洋监测系统技术专题中设立了“船载多参数拖曳式剖面测量系统技术”课题,其中,UCTD的研制任务由国家海洋技术中心承担。经过多年技术迭代与升级,在“十三五”国家重点研发计划“船载海洋动力环境要素传感器产业化”项目中,国家海洋技术中心实现了UCTD的产品定型与批量生产,为其广泛应用于海洋常规调查和军事海洋专项调查奠定了基础。
UCTD提供了快速、低成本的CTD剖面测量新手段,使大量获取海洋剖面数据成为可能;传感器探头可在投放测量完成后进行校准,从而大幅度提高观测数据的质量;具有广泛应用和良好市场前景。与其他剖面测量平台相似,UCTD探头下降速度的大小与稳定性,将决定是否能达到设计测量深度,并影响所测数据的质量[1-2]。
对探头外型进行优化设计以提供适当的阻力系数,精确计算探头的浮力值,再根据探头运动模型计算出应有重量,调整探头的结构设计以达到目标重量,从而实现对探头下降速度的控制,是UCTD系统研制中的关键技术之一[3-4]。
本文通过Fluent软件建立UCTD探头的流体力学分析模型,计算相应的阻力系数,优化探头的结构设计,并利用海上试验数据进行验证,确保数值计算与结构优化的科学性和合理性。
1 UCTD探头外型设计方法
探头外型设计主要确定主体尺寸与型线,同时兼顾内部布局、密封结构、装配要求、加工成本等多方面因素。流线形回转体几何形状简单,通过数学解析式表达线型,便于定量分析流体水动力性能,广泛应用于工程实际中。有学者采用分段思想简化线型解析式,即不同的特征段用不同解析式表达,不同的线型解析式通过边界条件表述完整的整体曲线[5]。
UCTD外型曲线解析式通过改变可调参数的数值形成一系列的曲线簇,便于改变探头几何形状,满足探头外型对流体水动力性能、几何尺寸等不同要求。综合考虑电导池、温度、压力探头的外形尺寸与安装结构,探头首尾两端均进行椭圆修正,中间段为平行中体,其首尾部曲线方程为。

式中:D0为横剖面最大直径;LE为进流段长度;LR为去流段长度。
探头下落过程中,在同一介质内,所受浮力为恒定值,所受阻力会随着速度变化而改变。当探头所受重力和阻力、浮力达到均衡时,运动将达到均匀状态,之后物体即以该极限速度匀速下降。探头入水后的基本运动方程如下所示。

式中:z为入水深度;v为水中运动速度;M为探头质量;Ff为探头受到的浮力;D为探头受到的阻力;ρf为海水密度;Vt为探头的体积;g为重力加速度;Cd为总阻力系数;S为物体浸湿投影面积。
探头在海水中下落时所受阻力包括摩擦阻力和形状阻力,总阻力系数Cd等于摩擦阻力系数Cf与形状阻力系数Ce之和。

摩擦阻力系数采用相对平板概念计算,使用普朗特·施里希廷公式。

对于几何相似的物体,在流体状态相同的情况下形状阻力系数接近。探头形状阻力系数的计算利用具有头部和尾部几何相似的参考探头已有实验资料得到。因此,可以作为已知条件,进行前期辅助设计,调整探头的质量与外型,使其接近技术指标的要求,简化后续流体力学仿真优化次数。
2 仿真分析与数值计算方法
Fluent软件的开发是基于“CFD计算机软件群的观念”,针对多相流动中的任何一种流动中存在的物理现象,选择一种求解方法使其迭代速度、收敛稳定性和计算精度等达到最优,同时由于使用不同的数值解法和划分多重网格的技术,可以实现最快的收敛速度及最高的计算精度。结构网格、非结构网格划分技术以及多种可供选择的物理模型,使其在湍流和噪声、传热、相变、辐射、化学反应、多相流等方面有着普遍的应用。
在对具体问题进行数值模拟计算前,对计算域进行离散化,将空间上连续的计算区域划分为若干子区域,确定各个区域中的节点,生成网格;将控制方程在生成的网格上离散,即将偏微分格式的控制方程转化为各个节点上的代数方程组。采用有限体积法导出的离散方程具有守恒性,且有明确物理意义的离散方程系数,有限体积法是目前关于计算流动和传热问题广泛采用的一种数值计算方法。
利用三维软件Creo2.0简化UCTD探头的结构模型,导入Fluent 软件中,完成网格的划分。为了保证探头流场充分展开,以UCTD探头为几何中心,取12 倍于其轴向长度,12倍于其径向长度的圆柱体区域作为计算域。为提高数值模拟中网格的计算质量,需要对计算域进行加密处理,选取2倍于其轴向长度,3 倍于其径向长度的小圆柱体作为网格加密区域,将探头头部,中部,尾部分别进行网格划分。采用混合网格技术划分计算域,在探头表面划分边界层,边界层网格为三棱柱形的半结构网格;探头附近区域划分四面体形的非结构网格;远离探头区域采用六面体形的结构网格。由于计算网格超过100 万,直接计算需要耗费大量时间同时对计算机要求很高,因此采用 Reorder 处理,这样可以明显提高计算速度。
在流场数值分析时,有多种可供选择的湍流模型,如DNS、LES、RSM 模型以及工程中应用较多的k-ε模型[6]。本文根据UCTD探头的实际工作环境,选择以雷诺时均N-S方程为基础的RNGk-ε模型来模拟探头周围的流场分布情况。该模型的基本控制方程为Navier-Stokes方程[7]。

式中:ρ是流体密度;t是时间;u是速度矢量;u、v和w是速度矢量u在x、y和z方向的分量;P是流体微元体上的压力;是粘性系数,依赖于流体性质;是拉普拉斯算子;X、Y、Z为外力分量。
求解器选取分离式隐式求解器。对控制方程采用有限体积法进行离散,离散格式采用二阶微分格式。为了防止迭代过程中发散和数值不稳定,对动量方程和标量输运方程采用欠松弛技术[8]。速度和压力耦合采用SIMPLEC 算法,压力插值选用Standard 算法,动量、湍动能、湍流耗散率均选用二阶迎风模式[9-10]。采用速度进口边界条件,入流断面为均匀来流;对于出流边界条件,认为湍流已经达到平衡,故采用压力出流边界条件,以加快收敛速度;模型表面和计算域外边界设为无滑移壁面;模型近壁采用标准壁面函数进行处理。
3 流场分析与数值模拟
设定探头的迎流速度为4 m/s,对探头进行计算模拟。图1和图2分别为探头在水下下落过程中探头表面海流速度矢量云图和体表所受的压力分布云图。

图1 海流速度矢量云图(m/s)
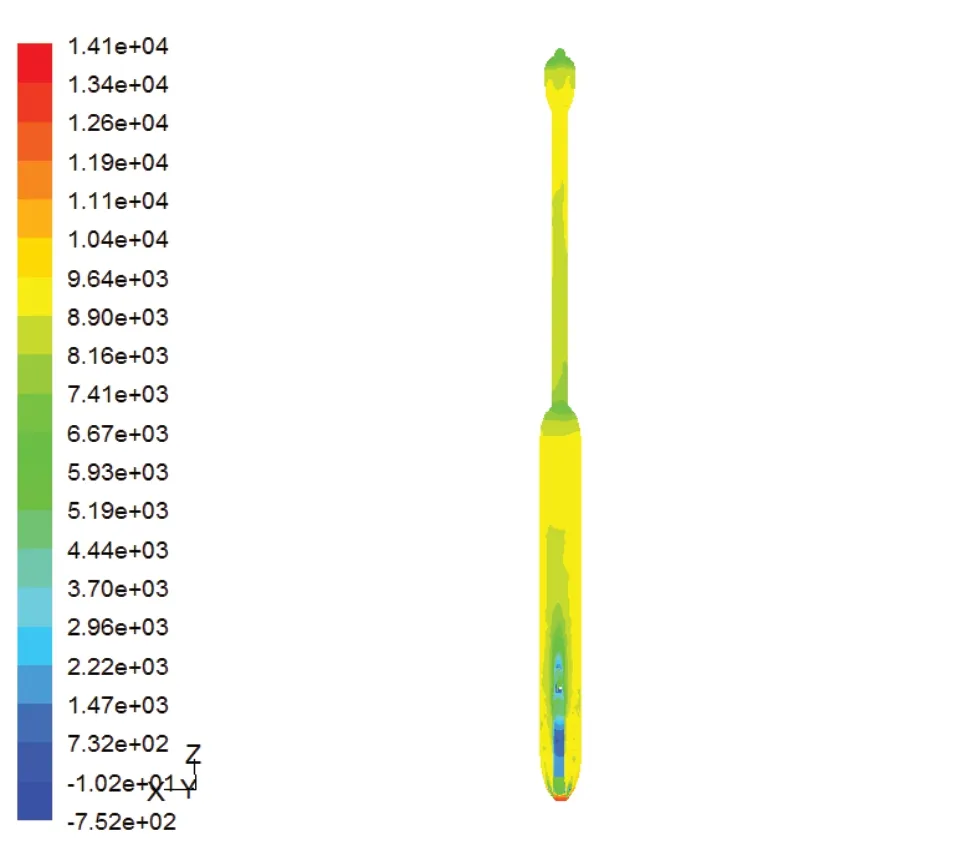
图2 探头压力分布云图(Pa)
图1中,箭头表示海流速度,箭头的方向代表速度的方向,箭头的颜色代表速度的大小,箭头的疏密是由划分模型网格时不同区域的网格密度不同造成的。从图中可以看出,探头周围流场分布基本对称,探头周围流体流动的低速区有1处,高速区有2处,低速区在探头的头部区域中前端,高速区在头部前端及尾翼后端。流体流经探头的过程中,周围的流体从探头上分离开来,这种分离是造成压差阻力的主要原因。
图2为探头在下落过程中的压力分布云图,探头模型的压力分布整体上比较均匀,只是头部有高压区出现。因此,在探头的头部区域选用低摩擦系数的材料,以降低水阻。
通过上述仿真计算得知,流体沿着探头附着流动,未出现流场分离,可以初步判定UCTD 探头流线型设计的合理性。
根据数值计算获得的阻力系数,得到不同速度下阻力散点分布,可知当探头运动速度为4 m/s时,在水下受到的阻力为9.5 N,阻力系数为0.36。在UCTD探头下降过程中,当阻力D=Mg-Ff时,达到极限速度。基于上述分析结果,对UCTD探头进行相应的结构优化与重量调整,使其达到4 m/s下落的技术指标。
4 海试验证
此次试验海域为中国南海,航次起止时间为2017年1月9日—21日,起点在湛江市,终点为三亚市。UCTD海上试验于2017年1月14日进行,根据试验大纲,船舶定速走航期间进行UCTD样机的投放试验,整个试验过程海况不超过2级。图3是UCTD系统海试现场布放图片,UCTD探头位于红色框内。

图3 UCTD系统现场布放
在UCTD测量仪走航投放试验中,通过UCTD专用绞车将线绳均匀缠绕于UCTD尾杆,待船速达到要求速度并稳定后,于船尾部甲板人工向下投放;同时打开UCTD专用绞车以一定速度放线,计时,待到达预估时间开始回收UCTD测量仪。回收后将数据回放保存,重新绕线准备下一次投放。
UCTD双端放线自由投放模式下探头的下降速度与船只运动完全分离,探头在投放点做近垂直快速下降运动,测量海水的温度、电导率和压力信号,当探头下降至约固定深度后,用绞车将其收回。
表1是优化设计后的UCTD探头3次走航投放的试验基本情况,图4至图6是探头下降深度和速度随时间变化图。

表1 走航投放的试验基本情况

图4 第8次投放UCTD速度变化图

图5 第10次投放UCTD速度变化图

图6 第11次投放UCTD速度变化图
从上图中可以看出,3次投放探头的下降深度都超过了420 m,在双端放线过程中,受到海流等因素的影响,下降速度在4 m/s附近波动,最大下降速度均超过了4.2 m/s,达到了设计要求。
5 结 论
本文利用外型曲线解析式和探头基本运动方程完成初步设计,通过对 UCTD 探头外部流场的仿真模拟,计算相应的阻力系数,对其进行结构优化和重量调整。UCTD探头速度场与压力场的分布云图表明,探头周围流场分布均匀,流线型设计合理。2017年初的海试数据曲线表明,基于数值计算结果优化后的UCTD探头可以达到最大下降速度大于4 m/s的技术指标,验证了数值仿真计算与结构设计的科学性和合理性。研究结果对UCTD 探头水下运动规律研究和探头的设计具有参考价值。
