基于云架构的有/无人机协同作战任务分配方法
2021-08-19段晓稳李波雒浩然
段晓稳 李波 雒浩然
(1.中国电子科技集团公司第二十研究所,陕西西安 710068;2.西北工业大学电子信息学院,陕西西安 710129)
0 引言
面对复杂的战场环境,目前大多数作战任务中无人机的控制系统还不能替代人做出最优判断与决策,有/无人机协同作战模式可以弥补无人机在执行具体作战任务时面对紧急情况的决策响应能力的不足[1]。
云计算提供的资源虚拟化能力,通过识别、连接系统中的各种作战单位,把多兵种快速融入到一体化作战体系中[2-3]。各作战单位动态调用资源去完成任务、实现快速的火控解算和准确的战场态势评估,各种战场资源在一体化作战体系中被统一调度和管理,各类作战平台通过云架构进行高效协同,使得火力打击节点在整个作战杀伤链中,能够获得实时态势感知和全域信息共享能力,最终实现网络化杀伤的协同作战能力。为了有效均衡系统负载、合理分配系统资源,并能高效分配和处理作战任务[4-6],提出基于云架构的有/无人机协同交战原型系统,并针对其中的任务调度及资源分配问题进行了研究。
1 基于云架构的有/无人机协同交战系统
1.1 基于云架构的协同交战系统组成
本文设计了基于云架构的有/无人机协同交战系统,主要包括三个部分,如图1所示。
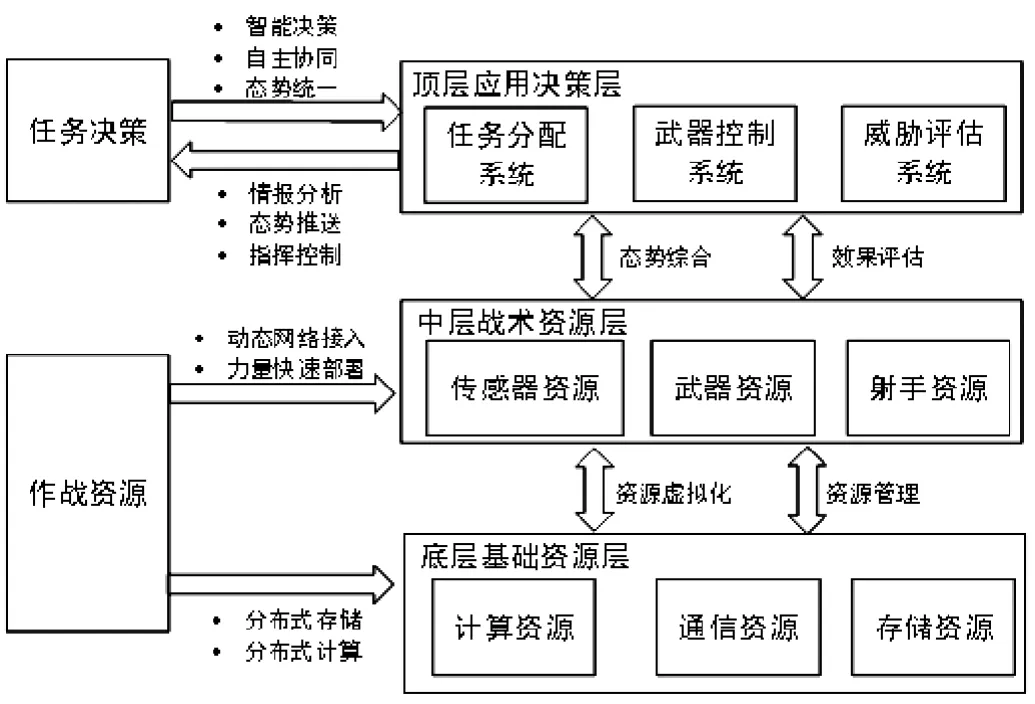
图1 基于云架构的协同交战系统示意图Fig.1 Schematic diagram of a collaborative engagement system based on cloud architecture
1.2 协同交战系统技术体系
基于云架构的有/无人机协同交战系统通过使用虚拟化技术对各个作战节点中的物理实体(如指挥中心的地面控制站、预警机等)的基础资源进行虚拟化从而形成作战资源池。作战单位向云端提交的任务请求,由任务分配系统分配的虚拟机进行计算。虚拟机运行在通过网络组成的物理机集群上,如图2所示。
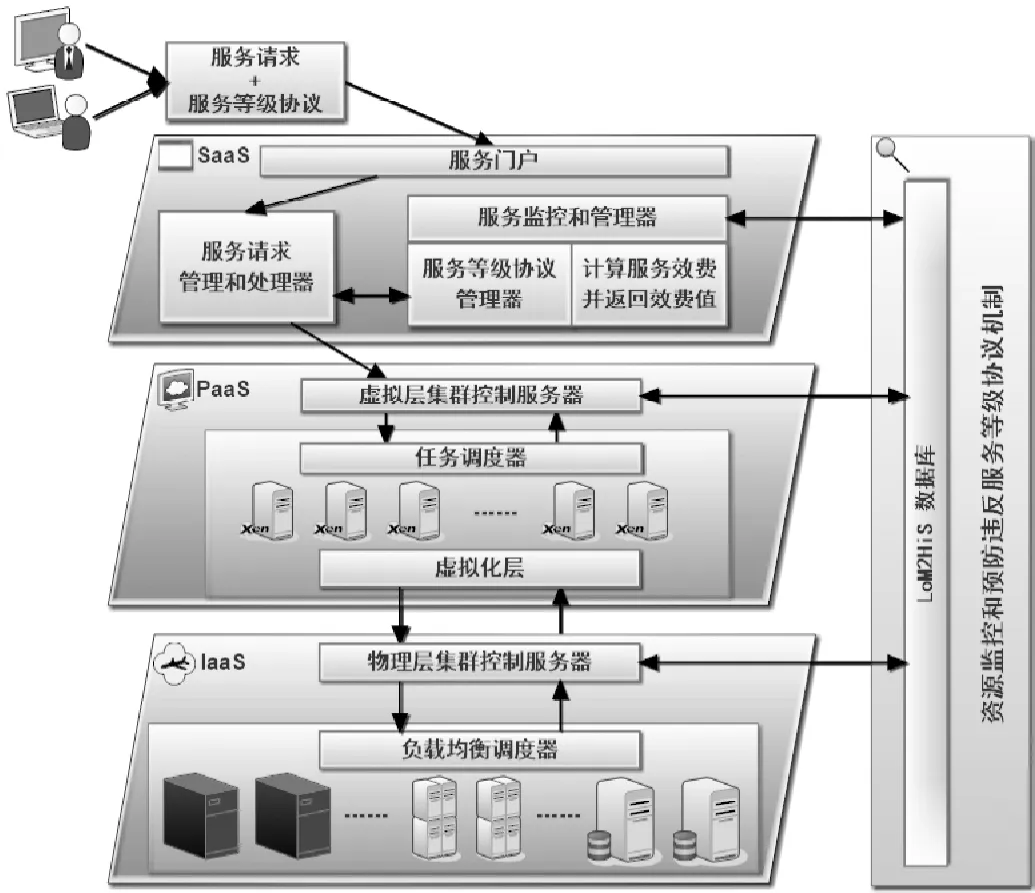
图2 基于云架构的协同交战系统技术体系Fig.2 Cloud-based collaborative engagement system technology system
1.3 基于云边协同的交战系统优化
在有/无人机协同作战任务中,对实时性的要求极高且在执行侦察任务时产生的数据量巨大。无人机与云端之间会产生大量的数据流,需要有效的分流处理机制来避免协同交战系统网络的拥堵。
在此基础上提出基于云边协同的交战优化系统,通过增加边缘服务器作为作战节点与云端数据中心之间的中间层[7],使作战节点随时获取一定的计算能力和存储空间,在战场上可融合各种来源的数据并在不连接云端的情况下进行快速处理,传统云计算数据处理过程和云边协同数据处理过程对比如图3。

图3 传统云计算/云边协同数据处理过程Fig.3 Traditional cloud computing/cloud-side collaborative data processing process
2 有/无人机协同交战系统资源配置模型
2.1 基于云架构的协同作战任务分类
基于云架构的作战任务调度需要处理有/无人机协同作战过程中如目标分配、火控解算和态势处理等任务。不同任务具有不同的资源需求,任务主要分为交互型、计算型和数据型三类。执行三类任务时对不同资源的需求不同,如表1所示。

表1 任务分类Tab.1 Task classification
2.2 基于云架构的协同作战任务模型
定义1:服务器集群构成的集合为D={D1,…,Di},其中i表示服务器集群的数量;系统中可提供计算能力的物理机构成的集合为M={M1,…,Mj},其中j表示某服务器集群中物理机的数量。
定义2:某服务器集群中物理机Ma的资源集合,其中b表示该服务器集群中物理机Ma包含资源的种类,Rab表示物理机Ma中的某种资源量,例如每秒处理百万条指令数(MIPS)、CPU数、内存容量(MB)、存储容量(MB)、网络带宽(Mbps)等。
定义3:物理机Ma上资源b的利用率

定义4:任务可以在就近的具备计算能力的边缘服务器上进行处理,边缘服务器i的属性: ={control,core,ips,bandwidth}。
计算资源匮乏的节点可通过在高性能节点中创建虚拟机来执行大量任务。创建虚拟机时需要使用该节点的计算、网络以及存储资源。负载模型为:

其中:Lrate表示云架构整体的负载率,表示边缘节点m的资源总量,AvaRm表示节点m的利用率,表示边缘服务器中i个节点的资源总量。
采用有向无环图(DAG)来表示节点提交的任务请求,DAG包括边和顶点。其中顶点表示云端任务或边缘任务,边表示两个顶点的连接关系。
假设边缘端运行的任务c与云端数据中心中运行的任务H以云边协同模式执行态势评估、火控解算等任务,如图4所示,云端任务DAG1中包含3个任务FGH,边缘端的DAG2中包含5个任务abcde,共包含8个任务。实线边上数字表示两个任务间的事件交互、通信与计算代价;虚线边表示云与边缘节点交互的两个任务之间的通信代价。
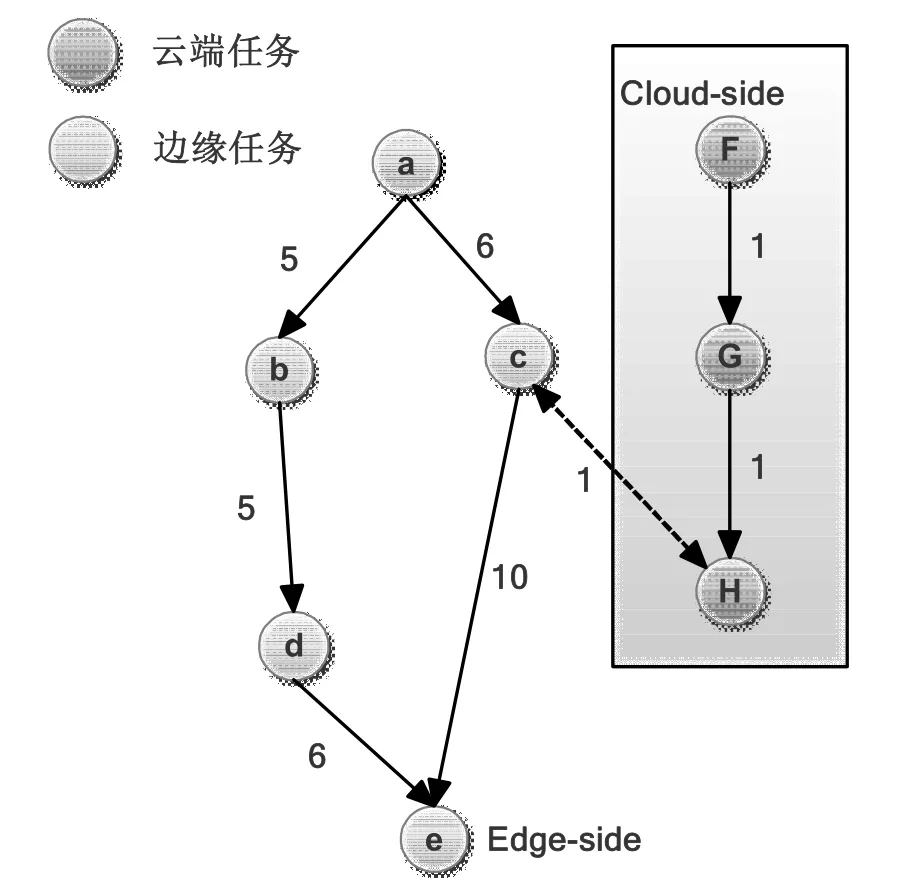
图4 云边协同模式下的两个DAG任务图Fig.4 Two DAG task graphs in cloud-side collaborative mode
3 基于云架构的协同作战任务调度算法
3.1 轮询算法
轮询算法(Round Robin,RR)就是当任务调度器每次接收到新任务时,把任务轮流分发给计算节点,不考虑节点上的连接数和任务处理情况。适合系统中设备性能相同且任务类型基本相同的情况:
假设有n个计算节点VMList={VM1,…VMn},RR算法可以描述为:
(1)从VM1开始依次调度VM2,VM3,…VMn;
(2)若所有节点都已被调度过,则重新开始。
3.2 平滑加权轮询法
加权轮询算法(Weighted Round Robin,WRR)根据系统中各虚拟机任务处理能力、CPU负载能力和通信带宽设置权值。加权轮询算法根据各节点权值和轮转方式对任务进行分发。
假设有n个计算节点VMList={VM1,…,VMn},默认权重为W={W1,…,Wn},WRR算法可描述为:
(1)初始化VMList。将W1个VM1加入至VMList,将W2个VM2加入至VMList,以此类推;
(2)从VM1开始按序调度;
(3)若所有服务器都已被调度过,则重新开始。
WRR算法并未考虑系统中各节点的权值变化,仅根据节点初始状态进行调度。一种改进方法为,通过任务调度器获得各节点的当前负载情况,然后根据动态情况调整节点权值,该算法称为平滑加权轮询法(Smooth Weight Round Robin,SWRR)。
假设有n个计算节点VM={VM1,…,VMn},默认权重为W={W1,…,Wn},当前权重为CW={CW1,…,CWn},在该算法中有两个权重,默认权重表示计算节点中任务量为零时的权重,当前权重表示经任务重分配后的权重,当前权重的初始值为默认权重,当前权重最大的节点为maxWeightVM,所有默认权重之和为WeightSum,计算节点列表为VMList,SWRR算法过程可以描述为:
(1)找出当前权重值最大的节点maxWeightVM;
(2)计算{W1,…,Wn}之和weightSum;
(3)更新maxWeightVM.CW为:
maxWeightVM.CW-weightSum;
(4)重新计算VM={VM1,…VMn}的当前权重CW={CW1,…,CWn},计算公式为VMn.CW=VMn.CW+VMn.Wn;
(5)返回maxWeightVM,将任务调度到max WeightVM节点上。
(6)重复过程1~5,直到完成全部任务调度。
4 仿真分析
4.1 实验参数设置
将异构无人机的载荷与机载设备综合为传感器类型,表2给出了5种不同类型节点的详细属性。其中地面站和预警机分别作为云端数据中心和边缘服务器节点。表3给出了不同类型任务的详细属性。表4给出了其他参数设置。
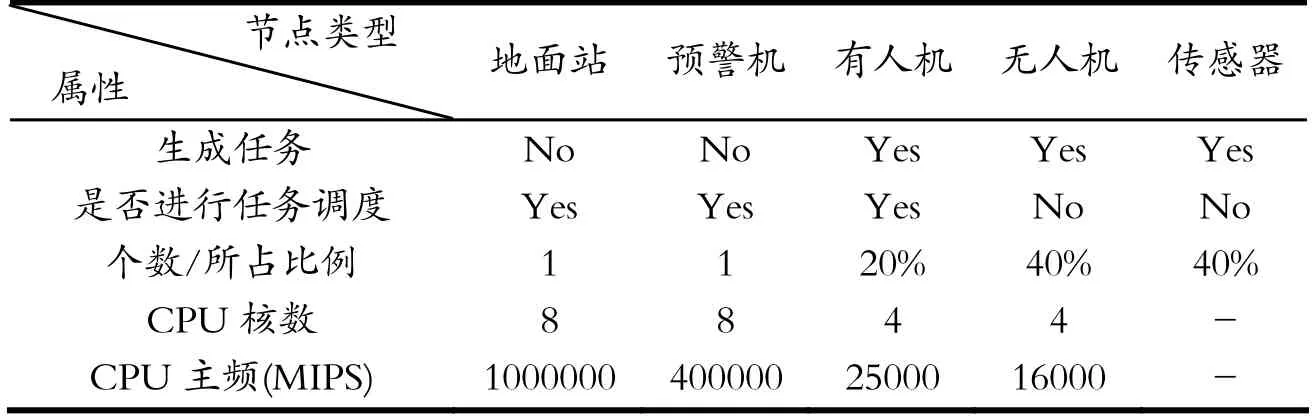
表2 节点类型Tab.2 Node types
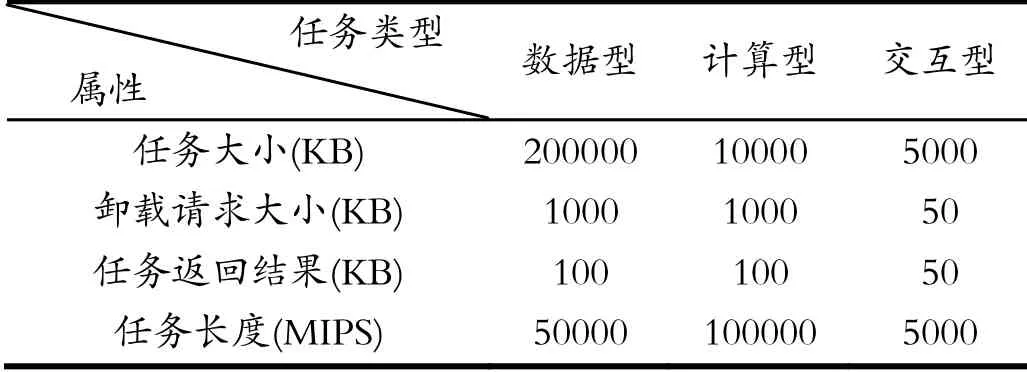
表3 任务分类Tab.3 Task classification
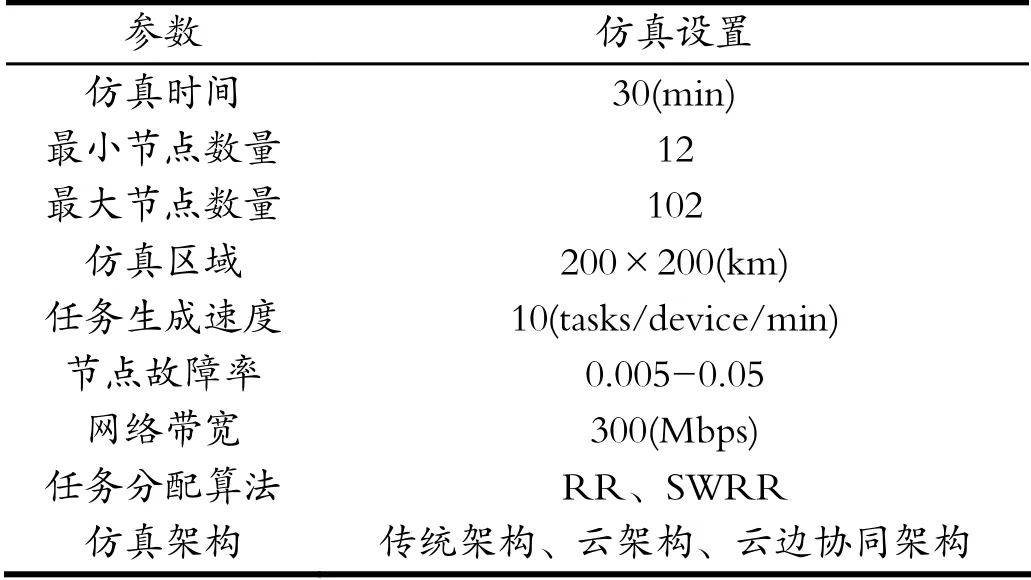
表4 仿真设置Tab.4 Simulation settings
4.2 实验结果与分析
实验内容:分别获得使用RR、WRR和SWRR的三种架构(传统结构、云架构和云边协同架构)的平均任务完成时间、平均负载率、通信带宽需求、任务成功率。
4.2.1 平均任务完成时间
如图5,各种架构下通过SWRR平均任务完成时间均得到减少,且使用SWRR在云边协同架构下的平均任务完成时间最小;SWRR相对于RR平均任务完成时间减少了22.38%;使用SWRR时云边协同架构相对于云架构的平均任务完成时间减少了3.79%。
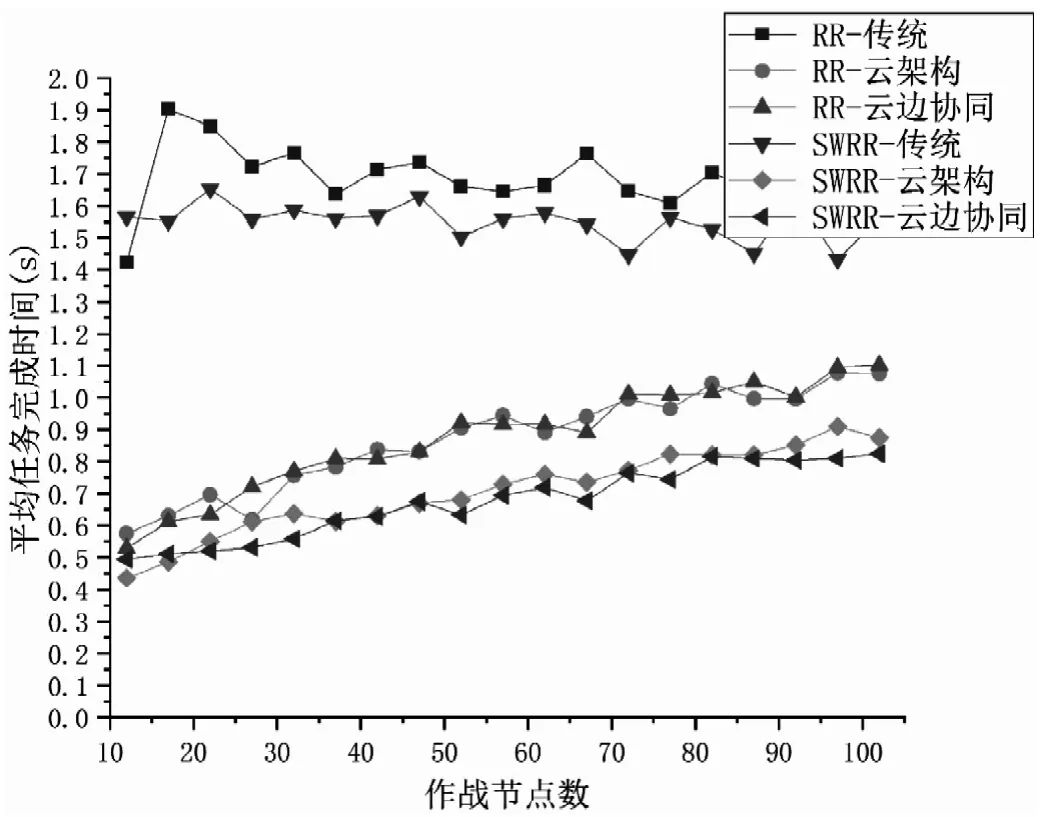
图5 不同任务分配算法/仿真架构的平均任务完成时间对比Fig.5 Comparison of the average task completion time of different task allocation algorithms/simulation architectures
4.2.2 平均负载率
如图6,云架构和云边协同架构的负载率随着节点数的增加均为上升趋势,且都低于传统架构;使用SWRR后,云架构与云边协同架构负载率降低,传统架构负载率上升。SWRR相对于RR平均负载率降低了21.73%;使用SWRR时云边协同架构相对于云架构平均负载率降低了13.18%。
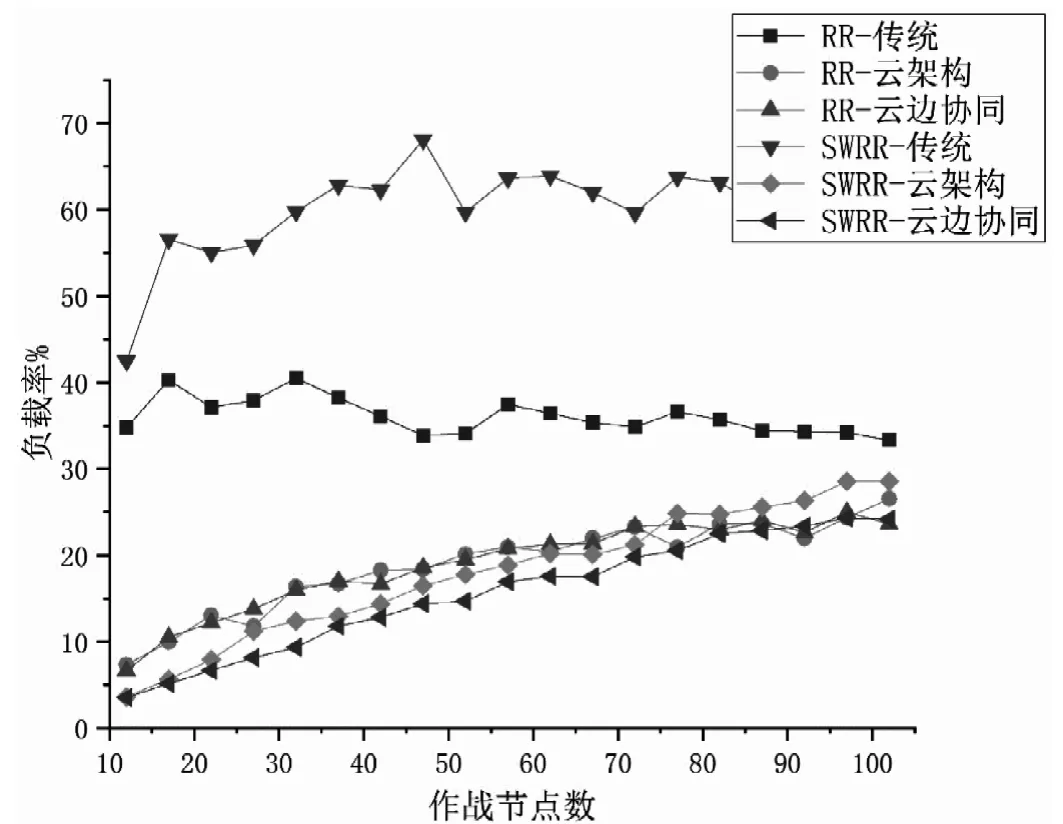
图6 不同任务分配算法/仿真架构的负载率对比Fig.6 Comparison of load ratios of different task allocation algorithms/simulation architectures
4.2.3 通信带宽需求
如图7,云架构下通信带宽需求随节点数增多先小幅降低再上升,传统架构通信带宽变化不大,云边协同架构在节点数较多时带宽需求最低。SWRR相对于RR通信带宽需求降低了42.42%;使用SWRR时云边协同架构相对于云架构,在节点数较多时通信带宽需求降低了4.49%。
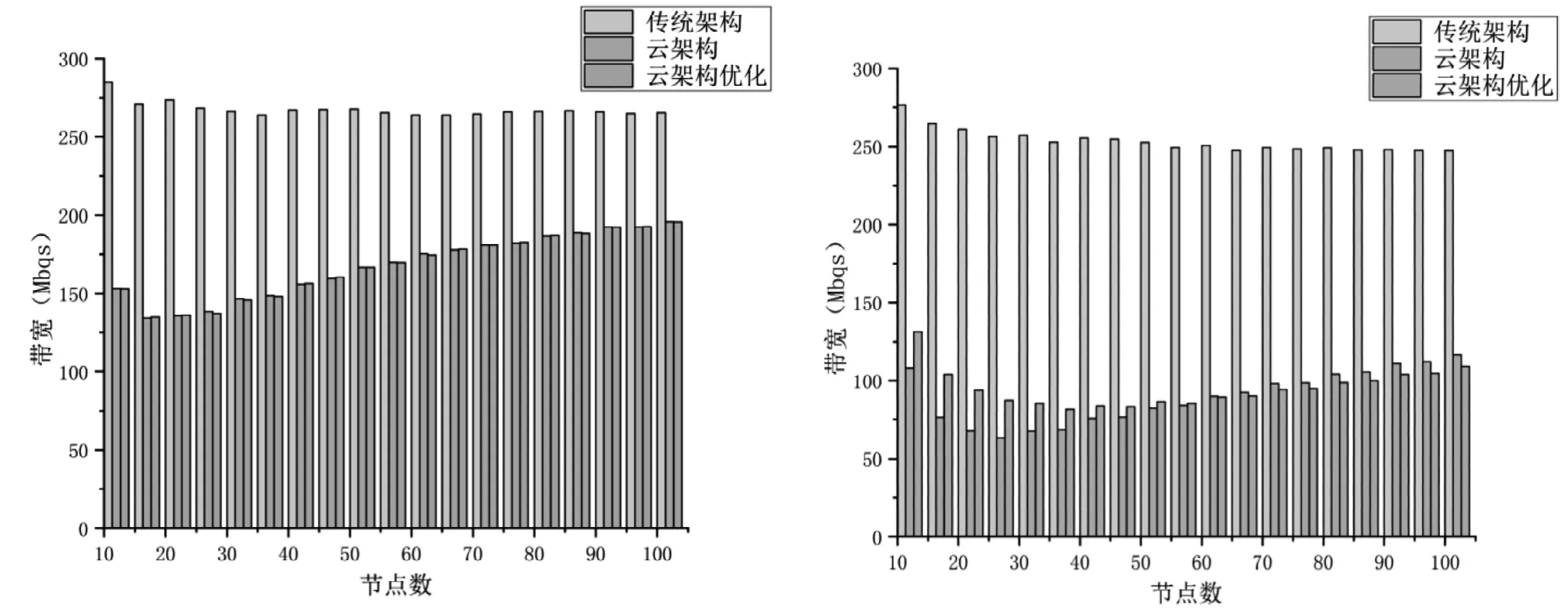
图7 不同任务分配算法/仿真架构的通信带宽需求对比Fig.7 Comparison of communication bandwidth requirements of different task allocation algorithms/simulation architectures
可以看出,云边协同架构相对于传统架构的任务平均完成时间、负载率和通信带宽需求均大幅减少。相对于云架构任务平均完成时间减少了3.79%,负载率降低了13.18%,在节点数较多时通信带宽需求降低了4.49%。同时避免了在产生大量作战任务请求时,部分节点空闲而只有单一节点负载过高导致的任务处理缓慢、通信延迟等问题。
5 结语
本文针对有/无人机协同作战任务调度问题,对任务复杂性进行分析,通过对计算资源、通信资源的抽象建模,使用CloudSim对提出的基于云边协同的云架构优化方法进行了仿真验证。结果表明云边协同的云架构优化方法能够降低任务平均完成时间,均衡系统负载,并降低通信带宽需求。
