基于RobotStudio仿真软件的ABB工业机器人运动轨迹程序的设计*
2021-08-19杨怡婷梅灿华于世楠
杨怡婷 梅灿华 于世楠
(1.天津滨海职业学院,天津 300451;2.淮南职业技术学院,安徽淮南 232001;3.天津滨海职业学院,天津 300451)
0 引言
工业机器人是集机械工程、微电子技术、自动控制、自动检测技术、AI人工智能等多种先进技术于一体的自动化设备[1]。ABB工业机器人作为四大家族之一,在搬运、码垛、焊接、装配、分拣、检测等方面应用相当广泛。
RobotStudio是ABB机器人公司的一款离线编程与仿真的应用程序,软件使用图形化编程、编辑、调试系统来操作机器人,并能够模拟优化现有的机器人程序。它既是仿真软件,又是编程软件;既可以进行碰撞监测,又可以自动生成路径;既可以创建工作站模拟真实场景,还可以与真实的机器人通信实现在线作业[2]。
1 设计任务描述
本设计是要求在RobotStudio仿真软件中新建一个虚拟工作站,导入相应的机器人、工具和工件,再创建其工件坐标与轨迹程序,最后仿真运行机器人并录制视频[3]。
2 建立工作站的方法
第一步要导入机器人:首先要在RobotStudio软件中新建一个工作站:命名为“workstation1”;然后导入机器人,方法是:基本→ABB模型库→IRB120→确定。
第二步要导入工具,方法是:基本→导入模型库→设备→training Objects→my tool,单击左侧“布局”→选中my tool,按住左键,向上拖至IRB120→选择“是”这样工具即安装在机器人六轴的法兰盘上。
第三步是导入工件:这里我们需要导入2个工件,一个操作台和一个工件。首先导入操作台,方法是:基本→导入模型库→设备→propeller table;再选中左侧“布局”中的IRB120→右键→显示机器人工作区域;最后选中布局中的table→在Freehand工具栏中选定“大地坐标”→点击“←→”移动→按箭头移动table的位置。然后再导入操作对象-工件,方法是:基本→导入模型库→设备→curve thing。
接着利用两点法将工件摆放在table上,方法是:单击左侧“布局”→选中curve thing→右键→位置→放置→两点,选择上方的“捕捉工具”→选中“选择部件”和“捕捉末端”,再单击“主点一从”第一个坐标框→对齐工件和table的两点→单击应用即可。
第四步建立机器人系统,方法是:基本→机器人系统→从布局→修改名称位置后→下一个→完成。这样,一个完整的工业机器人系统就初步创建好了,如图1所示。
3 创建工业机器人工件坐标
这里创建工件坐标的方法不是利用虚拟示教器来操作的,而是使用选项卡里的工具来进行的。方法步骤如下:(1)在“基本”选项卡里选择“其他”,再选择“创建工件坐标”;(2)修改左侧工件坐标名称为“wobj1”,选“用户坐标框架”中的“取点创建框架”→下拉菜单→三点;(3)在上方的捕捉工具中单击“选择表面”“捕捉末端”;(4)将鼠标选中“X轴的第一点”的第一个坐标,再将鼠标指向table的第一个点、第二个点、第三个点,同时可以观察到三点坐标值的变化, 然后单击“accept”→“创建”,此时可以拉近“table”观察到新创建的X-Y-Z坐标系;同时还单击左侧的“路径与目标点”,即可看到工件坐标中新增的wobj1,如图1所示为三点法创建的机器人工件坐标。
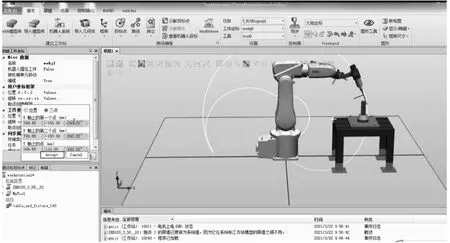
图1 三点法创建机器人工件坐标Fig.1 Three-point method to create robot workpiece coordinates
4 创建工业机器人运动轨迹程序
当我们建立好工具坐标和工件坐标之后,就可以控制机器人带着末端执行器的工具在指定的工件上进行运动轨迹的程序设计,本设计是要求工业机器人沿着工件propeller table的4条边行走一圈,最后回到终点。
4.1 创建程序的方法
首先在“基本”选项卡里找到“路径”,选择空路径,即生成空路径“path_10”;
接下来就要开始走运动轨迹了:
(1)先确定第一个起始点:通过指令“MoveJ*,v100,fine,Mytool,wobj1”,MoveJ是机器人的关节运动指令,对路径的精度已全部是很高,也不要求路径是一条直线[4]。再选择上方“Freehand”中的“手动关节”,变换关节位姿,将机器人工具拖至合适的位置,作为起点,最后单击上方的“示教指令”,即生成第一个轨迹路径。
(2)第二个点,即table第一个角点:选择上方“Freehand”中的“手动线性”,将机器人工具拖至第一个角点,移动过程中可缩放、3D旋转调整,最后单击“示教指令”即生成第二个轨迹路径。
(3)第三个点,即table的第二个角点:沿着table做直线运动,需将下方的指令切换为“MoveL*,v100,fine,Mytool,wobj1”, MoveL是机器人的线性运动指令,它要求从起点到终点的路径必须为一条直线。再拖动机器人至第二角点,单击“示教指令”即生成第二个轨迹路径。
(4)同理,示教table第三、四角点,再由第四角点返回至第一角点,生成第四、五、六个轨迹路径。
(5)最后,将机器人从第一个角点,拖回至终点,此时指令要切换为“MoveJ*,v100,fine,Mytool,wobj1”,单击“示教指令”生成第七个路径。
(6)右键单击左侧“path_10”→“自动配置”→“所有移动指令”,对新建的运动轨迹进行系统配置,如果轨迹存在错误,这里会有提示。
(7)最后右键单击“path_10”→“沿着路径运动”,就可以观察生成的轨迹运动。
4.2 操作注意事项
(1)进行手动线性操作时,如果关节接近极限而无法拖动时,可以通过单轴运动适当调整机器人的姿态。
(2)在整个示教过程中,若机器人无法到达工件,也可以调整工件的位置。
(3)在整个示教过程中,由于RobotStudio软件是二维的操作界面,所以为了保证定位的准确性,要不断地调整视角进行观察[5],如图2所示。
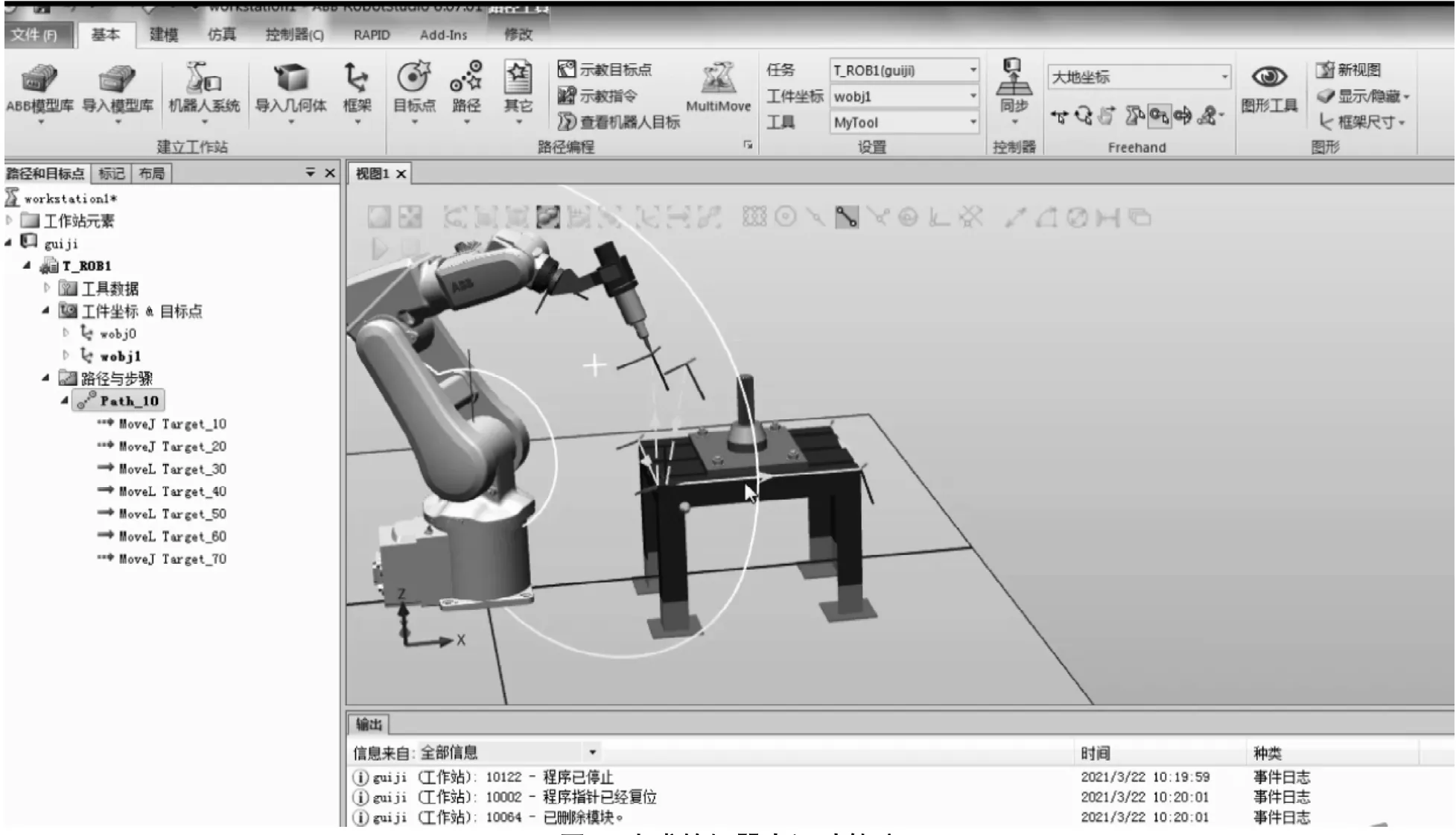
图2 生成的机器人运动轨迹Fig.2 Generated robot trajectory
4.3 仿真运行机器人及录制视频
RobotStudio软件中内置了视频录制的功能,使用视频录制功能可以直接将机器人仿真运行动画录制成MP4格式的视频文件,用户只要在任意一台安装有MP4格式文件解码软件的电脑或者移动设备上,都可以查看机器人仿真运行效果[6]。操作步骤为:基本→同步→同步到RAPID,在对话框将“工作坐标”“工具坐标”“路径”均勾选上→确定,单击上方“仿真”→仿真设定→单击机器人T_ROB1→进入点选中刚才新建的“path_10→关闭”,这时单击“播放”即可观看仿真结果;选择文件菜单→选项→屏幕录像机→更改文件位置及文件名称,最后在仿真选项里选择“仿真录像”→播放,就可以查看保存的视频文件了。
5 结语
本设计是以仿真软件RobotStudio为基础,在建立的虚拟工作站中导入ABB机器人、工具和工件,创建其工件坐标与运动轨迹程序,并进行仿真运行和视频的录制,详细介绍了RS软件的知识和技能操作,有效利用了RS软件平台,模拟真实场景,提高工作效率。
