基于无人机多光谱遥感的水质年际变化
2021-08-18应晗婷夏凯
应晗婷, 夏凯*
(1.浙江农林大学 信息工程学院,浙江 杭州 311300; 2.浙江省林业智能监测与信息技术研究重点实验室,浙江 杭州 311300;3.林业感知技术与智能装备国家林业局重点实验室,浙江 杭州 311300)
水质监测在维护水环境健康方面具有重要作用。分析和研究水质要素的空间变化及其内在原因对水环境的保护有重要意义。传统的水质监测方法为现场测量,该方法有较高的准确性,但需要较多的人力和物力投入,无法对危险地区勘测,离散型的数据也只体现了局部意义,具有较大的局限性。
随着空间技术的发展,卫星遥感技术以其高效、低成本以及覆盖范围广的优势在大型空间尺度的水域研究已得到较好的应用,例如沿海水域、湖泊和水库等[1-6]。使用卫星遥感技术监测水质,可以得到全面的水质信息,长时间连续的监测还可以探究水体的空间变化规律以及影响因素,可以更好地保护水环境。如薛文静等[7]基于MODIS卫星遥感资料获取了2002—2017年长江口的表层悬浮物浓度数据,分析并得出风向对悬浮物浓度的扩散具有显著的作用,南风有利于高浓度悬浮物向外海扩散,东风则抑制扩展的结论。赵宁等[8]基于Landsat系列数据影像分析了红碱淖水域水质和周围植被变化,20世纪90年代后湖面NDVI骤增,暗示叶绿素a或悬浮物浓度增加,间接表明湖区水质变差。
“十三五”规划要求以科技创新加强水体污染控制与治理,小型水域的水质状况也得到了重视。然而卫星遥感技术的中低分辨率无法对较小的水体成像,小型水域多而杂的情况使得小型水域的管理成为挑战。随着无人机及传感器技术的发展和提升,使用无人机搭载小型传感器进行环境监测越来越常见,其中包括对水质监测的研究。比如黄宇等[9]通过无人机搭载高光谱传感器获取高光谱图像反射率数据,构建总氮、总磷、叶绿素、悬浮物和浊度的监测模型并研究其浓度空间分布。杨振等[10]利用无人机高光谱数据建立水体悬浮物浓度和浊度的空间分布图,实现对小中型水域水质参数的快速监测。除了高光谱数据,多光谱数据也能很好地对一些水质参数进行监测。如黄昕晰等[11]使用无人机多光谱数据以及OPT-MPP算法建立了悬浮物浓度和浊度的反演模型,其决定系数R2分别达0.787 0和0.804 3。
目前,使用无人机携带传感器监测水质还停留在短期研究,进行长期数据分析的研究较少,特别是有关小型水域的年际变化研究。湖泊水质评价中,常采用悬浮物浓度和浊度作为水质评价指标。因此,本文结合无人机多光谱数据与实地监测数据(悬浮物浓度和浊度),对浙江农林大学东湖校区内的小型水域—东湖进行了水环境监测,分析其水质的年际变化特征,为长期动态监测小型水域水质状况提供了技术支持以及水质治理的理论指导。
1 数据采集
1.1 研究区
本文选择浙江省杭州市浙江农林大学东湖校区的东湖(30°25′96.05″~30°26′19.36″N,119°73′37.98″~119°73′74.22″E)作为研究区(图1),东湖水域面积约44 000 m2,学校内部的溪流自西北向东南汇入东湖内,为半封闭性水域。湖泊周边种植有各种植物,其中以水杉以及柳树居多。东湖及周边环境给我们创造休闲观赏的场所,学校有些水上活动也会在东湖湖面上展开。及时监测分析和改善东湖的水质状况,可给全校师生带来更美好的生活和观赏环境。
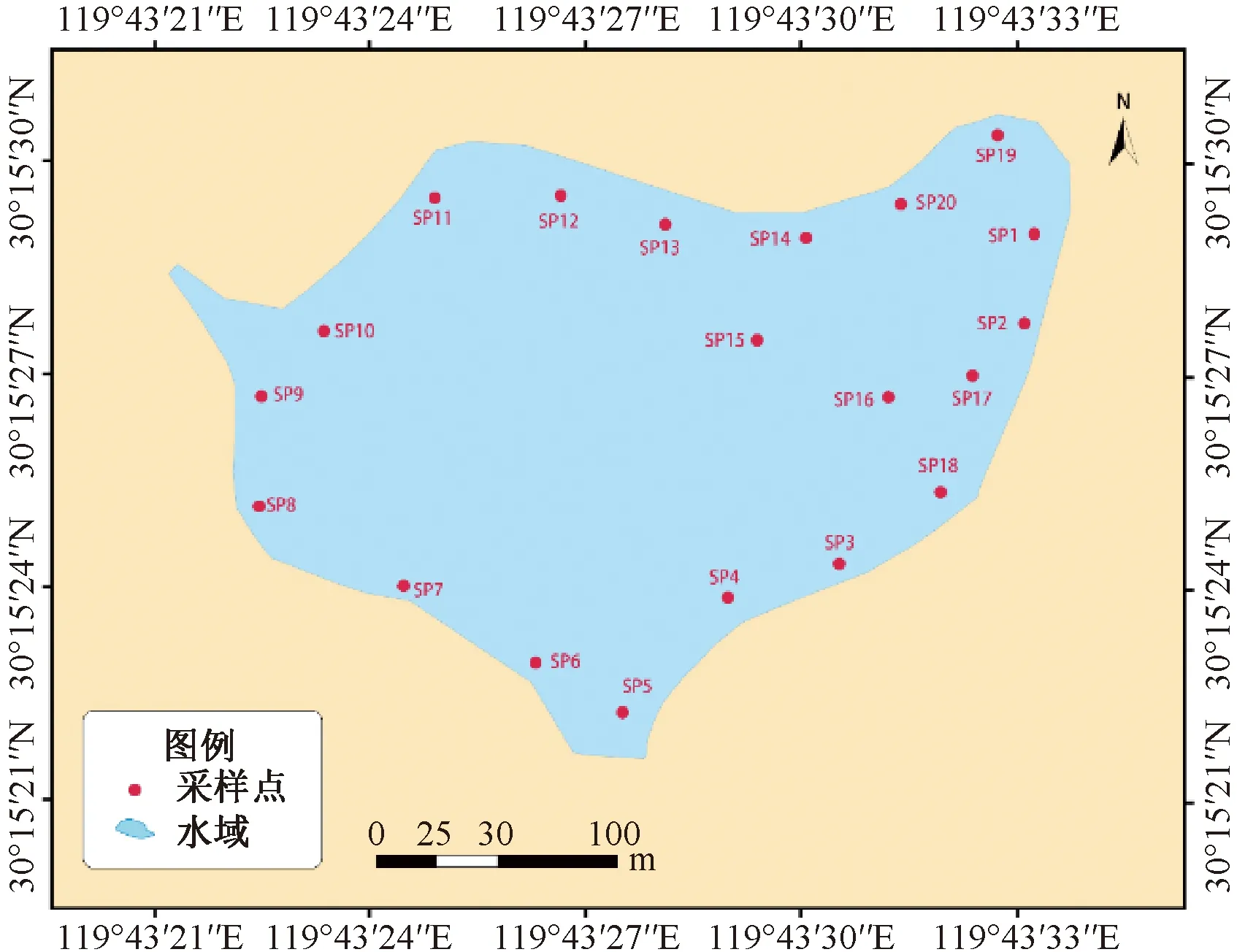
图1 研究区地理位置及采样点位置
1.2 实测数据
在研究区内于2019和2020年采集水样。其中,2019年3月23日与4月12日分别采集了20个水样;2020年5月23日采集了20个水样。于水面下0.5 m处使用采水装置采集水样,并于当日在实验室中进行悬浮物浓度和浊度的测定。其中悬浮物浓度使用杭州陆程仪器有限公司LH-SS1型悬浮物测定仪测量,浊度使用杭州陆恒生物科技有限公司WGZ-1B浊度仪测量。最终获取60个样本悬浮物浓度和浊度数据。实测数据表明,悬浮物浓度最大值为49.65 mg·L-1,最小值为26.07 mg·L-1,平均为36.26 mg·L-1;浊度最大值为25.20 NTU,最小值为12.90 NTU,平均为19.02 NTU。
1.3 无人机多光谱数据
本研究的遥感数据采用大疆M600无人机携带RedEdge(MicaSense,USA)传感器组成的遥感平台获取(图2)。于水质样本采样前0.5 h内采集图像数据,设置无人机航高200 m,航速5 m·s-1。采样期间天气晴朗,获取影像图像清晰。与卫星遥感相比,无人机获取的数据不受云层覆盖的干扰,可以更灵活地采集数据,时间尺度小。RedEdge多光谱相机能采集5个波段的信息,包括蓝色波段(475 nm)、绿色波段(560 nm)、红色波段(668 nm)、近红外波段(840 nm)以及红边波段(717 nm),目前,已广泛应用于农业监测[12-14],在水质监测方面也有研究[11,15]。

图2 无人机遥感系统
2 研究方法
2.1 数据预处理
由于无人机的飞行高度较低,获取的影像区域较小,与卫星遥感相比,可以忽略大气折射和地球曲率的影响[11]。而且RedEdge相机配备有光强传感器以及光谱反射率校正板,因此,使用Pix4D公司集成开发的Pix4D-mapper软件即可处理RedEdge传感器拍摄得到的多光谱影像,其操作流程为:(1)筛选有效影像导入Pix4D-mapper软件;(2)使用标定板图像对每个相应的波段图像进行辐射校准;(3)导出拼接好的正射影像图(图3)。最后使用ENVI 5.3软件在采样点上方读取采样点对应的图像光谱数据。
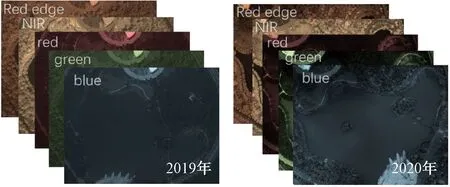
图3 无人机多光谱影像
2.2 模型建立及检验
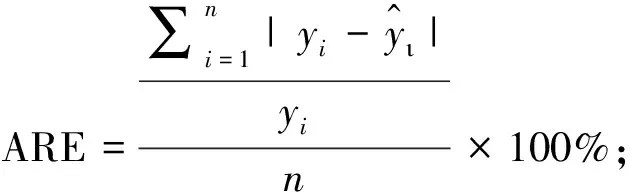
根据已有研究,本文利用MicaSenseRedEdge多光谱传感器的原始波段以及其他8种常见波段组合,包括R4/R3、R4/R2、R4/R1、R4/(R1+R2+R3)、(R2+R3)/R4、(R2+R3)R4、(R3+R4)/R2、R3/R4[2,16]的数据与悬浮物浓度和浊度实测值分别进行Pearson相关性分析。Pearson相关系数法是一种准确度量2个变量之间的关系密切程度的统计学方法,其绝对值越大,代表相关性越强[17-18]。最终选取相关性最高的波段或者波段组合进行模型的建立,并采用决定系数R2、平均相对误差ARE、相对均方根误差rRMSE以及综合误差CE对4种基本模型进行筛选,得出最优模型。其相关公式如下所示:
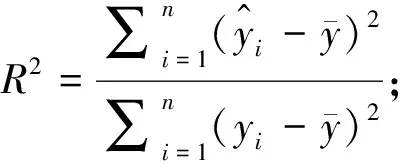
(1)
(2)
(3)
(4)

3 结果与分析
3.1 相关性分析
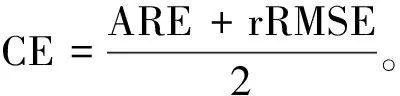
本文采用SPSS软件进行Pearson相关性分析,并对相关系数的绝对值进行比较(表1)。从表中可以看出,悬浮物浓度与R4/R1波段组合有显著的相关性,浊度与(R3+R4)/R2波段组合有最高相关性,且显著性满足统计学要求。因此,在接下来的过程中我们使用这些光谱参数进行建模。
3.2 建模与验证
采用Pearson相关系数法选定了自变量以后,进行了异常点的去除。最终使用30个样本作为训练集进行反演模型的训练,使用15个样本作为测试集测试各个模型的性能。为增强模型的稳定性,采用了IMP-MPP算法进行图像数据的处理,并采用线性函数、二次多项式、指数函数以及幂函数作为算法的一部分进行建模。IMP-MPP算法是一种改进的MPP算法[19],可以解决由于镜面反射和水体流动而引起的采样点与图像数据不匹配问题,与平均值法相比具有更高的建模精度。并最终选取了决定系数R2较高的模型作为最优模型,建模结果如表2所示。悬浮物浓度反演模型中,二次多项式模型的R2为最高,达到了0.694 1,表明拟合效果最好。浊度反演模型中,选取了指数模型作为最优模型,其R2达到0.732 3,符合模型的精度要求。
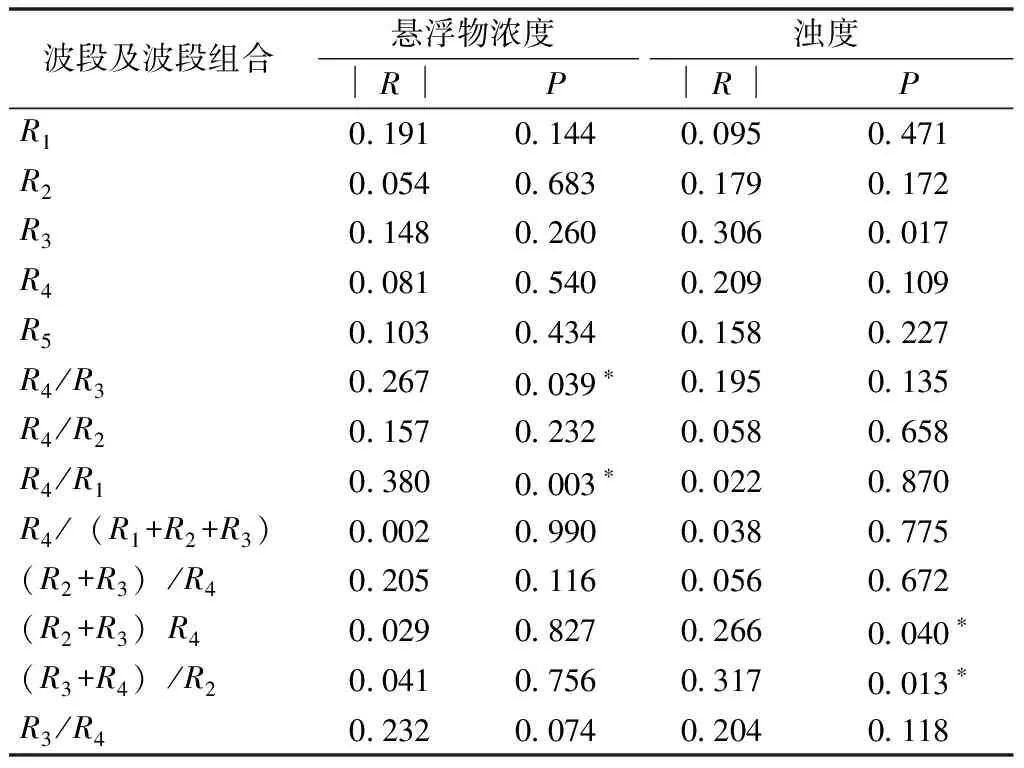
表1 光谱参数与水质参数的Pearson相关系数(绝对值)

表2 东湖水质参数的反演模型
使用平均相对误差ARE、相对均方根误差rRMSE以及综合误差CE来评价模型精度。综合误差CE越小,表示建模的效果越好。经过测试检验,其模型都适用于悬浮物浓度和浊度的反演(表3)。浊度反演模型平均相对误差为8.07%,综合误差为0.086 4。悬浮物浓度反演模型平均相对误差为12.78%,综合误差为0.142 5。与悬浮物浓度相比,浊度拥有更好的反演模型。

表3 东湖水质参数反演模型的精度
3.3 空间分布
根据表2的最优反演模型结合无人机多光谱影像进行反演,分别制作2019和2020年的东湖悬浮物浓度和浊度分布图。如图4所示,图例自下而上浓度升高。从2 a的浓度空间分布图可以看出,悬浮物浓度和浊度呈现大致相同的趋势,这与悬浮物浓度和浊度有很高的相关性一致。
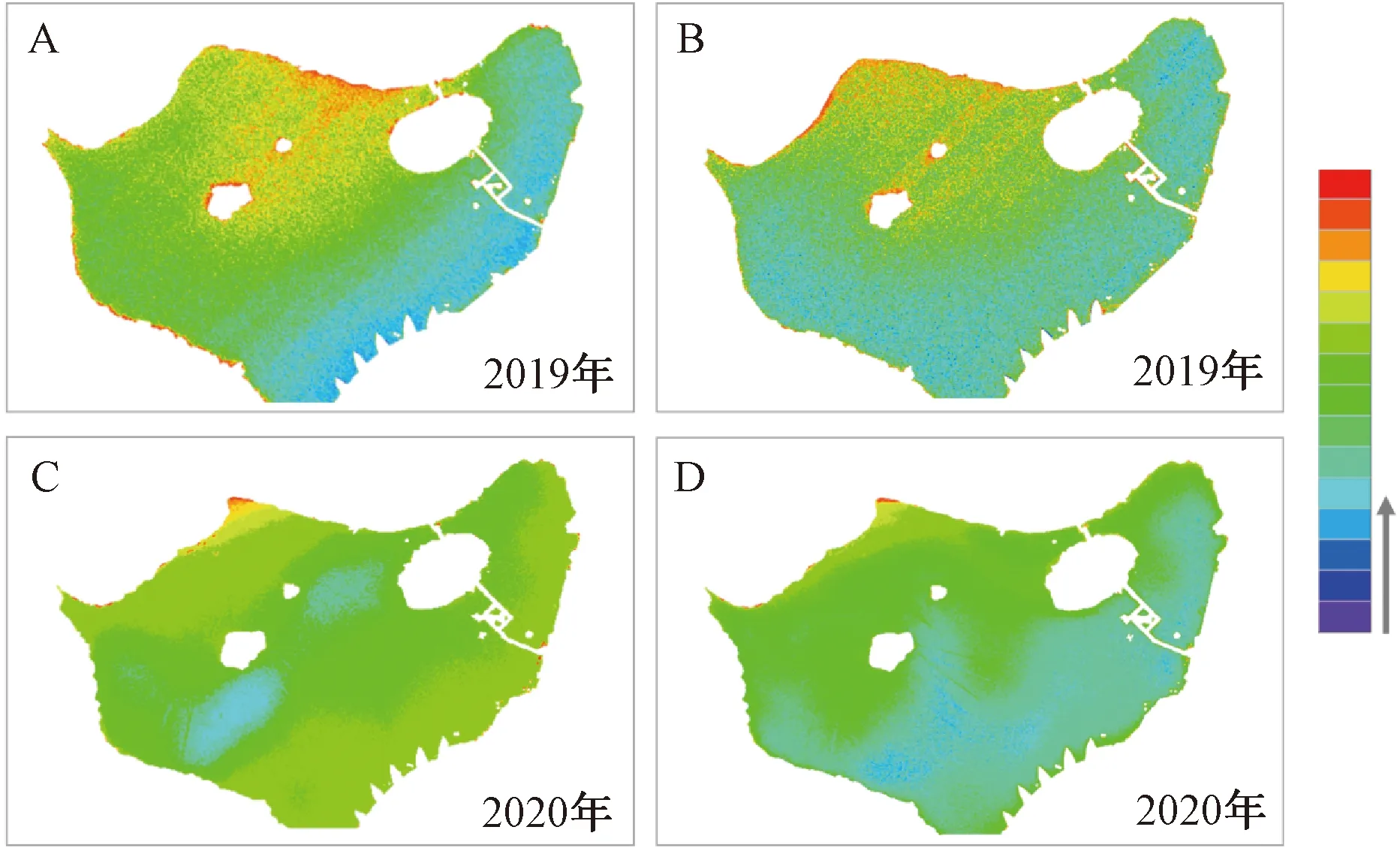
A和C为悬浮物浓度;B和D为浊度。图4 悬浮物浓度和浊度的空间分布
从2019年悬浮物浓度和浊度分布图可以看出,东湖东岸呈现淡蓝色,说明水质较好,根据实际勘测发现,岸边栽培了许多水生植物,水生植物的种植达到了净化水质的效果。而北岸呈现红色,出现反差。学校图书馆坐落于东湖北岸附近,而且有大片草坪供师生休闲活动,东湖的天鹅常由此处上岸活动,也常有学生给湖里的动物投食,进而影响水质。2020年悬浮物浓度和浊度的分布图可以看出东湖的东岸依旧呈现淡蓝色,说明水质状况保持良好。2019—2020年,东湖北岸的红色区域面积有所减少,水质有了些许的改善,这与大片荷花的种植有关。荷花的根系可以固定泥沙,从而降低水质的浊度和悬浮物浓度。
3.4 水质状况分析
对水质参数反演图进一步分析,统计反演图信息。水质参数分析箱图可以进行多组数据分布特征的比较,结合频数统计曲线图可以得出,2019年东湖的悬浮物浓度在25.4~56.6 mg·L-1,多数处于29.57 mg·L-1附近,浊度在11.1~33.8 NTU,多数处于17.13 NTU附近;2020年东湖的悬浮物浓度在24.9~67.3 mg·L-1,多数处于25.69 mg·L-1附近,浊度在15.0~37.4 NTU,多数处于17.93和18.90 NTU附近。从浓度范围可以看出,东湖水域中的水质参数变化幅度有所增大,水质状态不太稳定。从箱图的中位线看,2020年的悬浮物浓度和浊度与2019年相比,都有所上升(图5)。
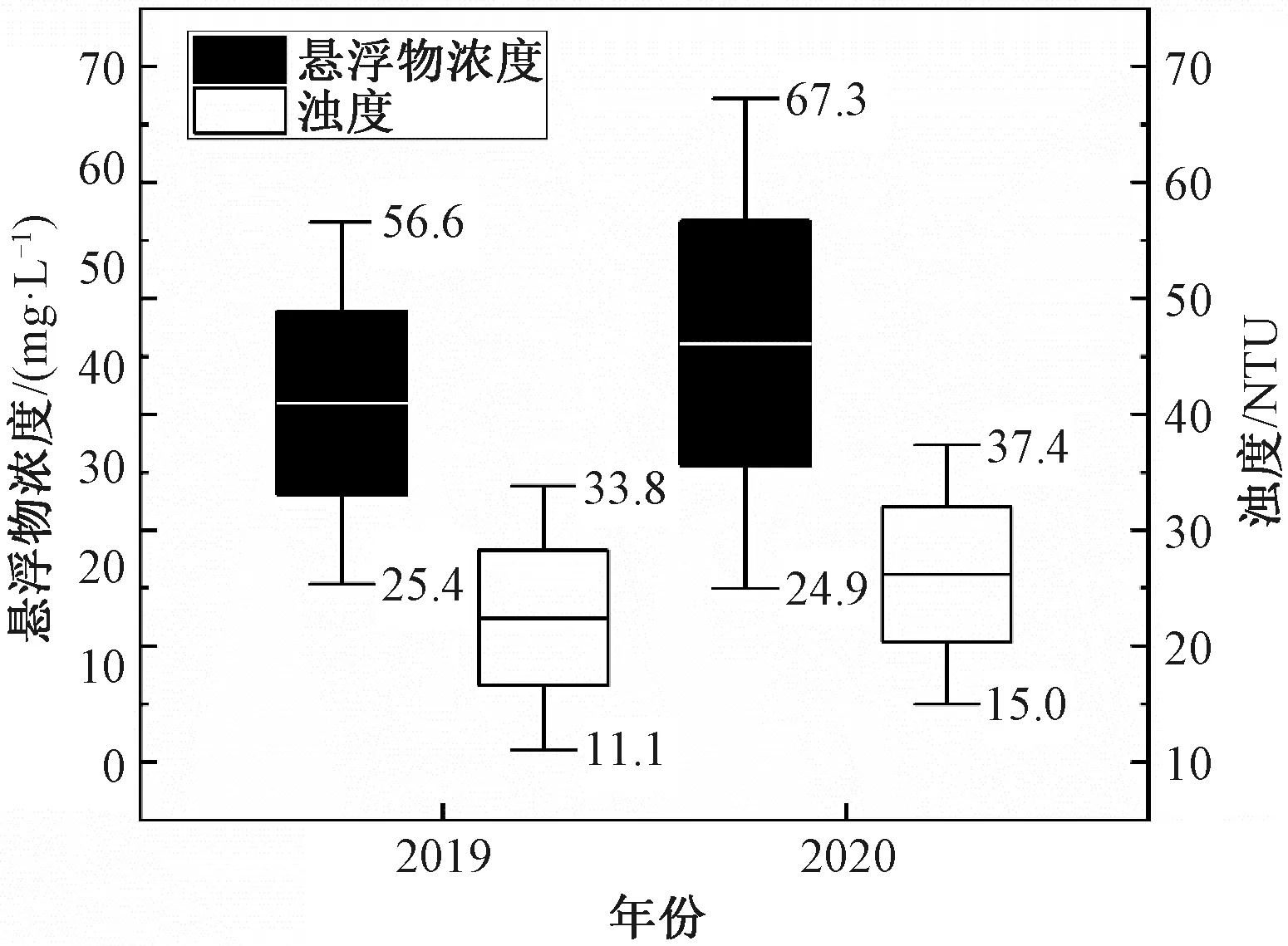
图5 水质参数的分析结果
为更精确地确定水质状况,我们进一步结合像元频数计算悬浮物浓度和浊度的平均值并进行分析,如表4所示,2019年、2020年的悬浮物浓度分别为32.99、26.73 mg·L-1,浊度分别为17.72、19.04 NTU(图6)。
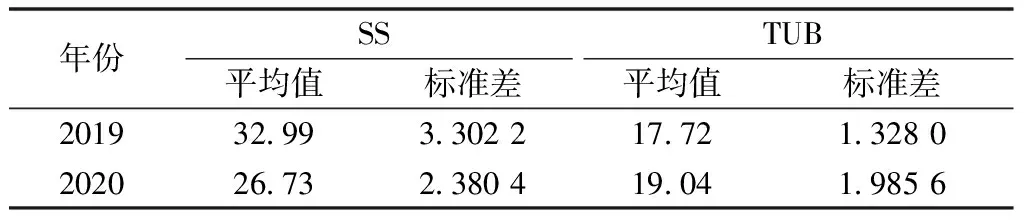
表4 悬浮物浓度和浊度统计信息
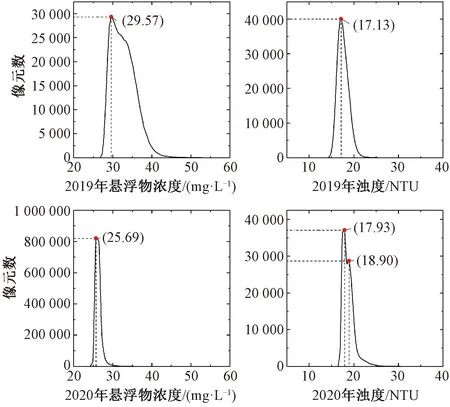
图6 悬浮物浓度和浊度像元的统计曲线
图7可见,2019年悬浮物浓度范围主要为30.5~35.6 mg·L-1,占像元总数的55.04%;2020年,悬浮物浓度主要范围为25.7~27.2 mg·L-1,占像元总数的81.79%,涵盖了水域的大部分区域。2019年浊度范围主要为16.1~18.1 NTU,像元数占总数的57.46%,为一半以上,其次是18.1~20.1 NTU,为像元总数的30.44%;2020年浊度范围为17.4~19.4 NTU的像元数为总数的66.83%。因此结合平均值和饼图可以得出,在悬浮物浓度方面,水质状况略微有所改善。在浊度方面,这2 a的水质状况总体相差不多。但湖边景观施工以及人为活动还是在一定程度上影响了水质。建议进行一些针对性的改善措施,比如在悬浮物浓度较高区域种植水生植被,不仅可增加物种多样性,也可提升观赏性。根据前面的研究分析,种植水生植被能有效改善水质。
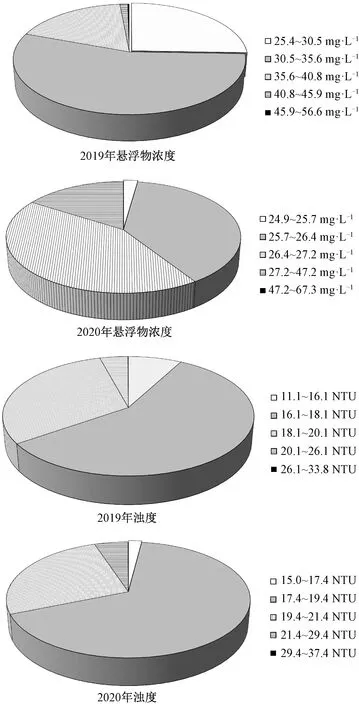
图7 各范围水质参数的比例
4 小结
基于无人机搭载多光谱传感器获取多光谱影像资料,结合实测数据建立反演模型,实现小型水域水体悬浮物浓度和浊度反演。与卫星遥感一样,无人机遥感也可实现年际变化的监测,且与卫星遥感相比,无人机遥感灵活、方便,还可破除卫星遥感因分辨率问题不能对小型水域成像的局限。
2 a来,东湖悬浮物浓度和浊度的空间分布呈现了一定的变化。通过分析可以看出东湖水质状况受到人为活动以及环境因素的影响较大。种植水生植被可以有效固定泥沙,改善水质状况,使东湖水体变得更加清澈。利用无人机搭载小型传感器获取小型水域水质数据资料,研究水质参数的年际变化,是一种对水质状况量化的研究方法。根据得出的浓度和浊度空间分布图以及分析图表,可以得到更精确的水质参数信息,采取更准确有效的措施改善水质。
国内目前使用无人机遥感监测水质还处于探索阶段。在实际研究过程中,仍会遇到很多问题,因此,目前的数据量还较少,在接下来的研究中需从季节时间序列去搜集更多的研究数据,尝试更多的建模方法,建立适用于更长时间序列的水质反演模型,为水质监测工作提供更稳定的技术支持。
