基于无人机机载LiDAR的电力线点云提取与重建
2021-08-17朱依民田林亚毕继鑫
朱依民,田林亚*,毕继鑫,林 松
(1.河海大学 地球科学与工程学院,南京 211100;2.浙江华东测绘与工程安全技术有限公司,杭州 310014)
引 言
我国是世界上电网规模最大的国家,同时也是电网巡检维护难度系数最高的国家[1-2]。随着架空输电线路建设里程的不断加长,对于输电线走廊巡检维护的效率和可靠性的要求也在不断提高[3-4]。由于无人机(unmanned aerial vehicle,UAV)机载激光雷达(light detection and ranging,LiDAR)测量技术具有受外界环境影响小、自动化程度高、采集数据时间短、测量精度高等优点,目前已将其广泛地应用于电力线走廊的巡检,通过对扫描到的电力线走廊点云进行处理可以实现电力线3维重建[5-7]。电力线3维重建主要包括电力线点提取与重建两个部分,电力线点提取有识别和聚类两个步骤,其中聚类是电力线提取的关键,目前,已有的相关聚类方法包括Hough变换[8]、3-D连通成分分析[9]、电力线模型生长与合并方法[10]等。电力线重建主要是选择合适的电力线模型,目前单档单根电力线的重建模型主要有直线和悬链线组合的模型、直线和抛物线组合的模型、直线和二元二次多项式组合的模型以及多项式模型[11]。
LAI等人[12]结合统计分析法和电力线的悬链线模型来实现电力线的3维重建,但统计分析法确定电力线走向时会受到粗差点的影响。WANG等人[13]基于点云的3维多尺度邻域特征使用支持向量机对电力线走廊点云进行分类,但是在分类前需要进行较多的数据预处理且分类的准确率也会受到邻域形状的影响,普适性、鲁棒性和分类的准确率都不高。ZOU等人[14]在滤波处理的基础上,根据电力线点云的高程特征以及在z方向上的连续性得到候选电力线点,然后使用Hough变换和最邻近生长算法提取单根电力线点,但是最邻近生长算法要求电力线点云均匀连续分布,不适用于断裂的电力线点云。WANG等人[15]结合随机抽样一致性算法和点云高程统计对电力线点进行提取,然后利用不同根电力线点的高程分布特性实现单根电力线点的分离,但是此方法要设置多个阈值参量且电力线点提取的效果还受点云密度、连续分布性和地物等多种因素的制约,因此鲁棒性和普适性都较差。YE等人[16]首先设置高程阈值初步剔除地面点,然后通过高程投影和重采样将点云转换为高程值影像,最后通过在影像空间中检测直线来对电力线进行提取和拟合,此方法中的高程值重采样会破坏原始数据的完整性,且在拟合时将电力线视作折线段进行处理,这与电力线自然状态下类似悬链线的形状不符。针对上述电力线提与重建精度和效率不高的问题,本文中在改进的点云滤波基础上,提出一种综合电力线点云分步提取、分段k均值聚类采样及结合直线和抛物线拟合的电力线点云提取与重建方法,研究成果为无人机机载LiDAR测量技术在电力线3维重建的应用提供技术支撑。
1 无人机机载LiDAR电力线点云提取
1.1 电力线走廊点云数据的预处理
电力线路走廊原始点云数据的预处理主要有个两部分,分别是噪声点去除和点云回波次数判断。由于LiDAR扫描过程中会受诸如多路径效应、飞鸟等影响而产生低位误差和高位误差等噪声点,而大多数滤波算法都是将点云的最低点作为地面种子点,为了避免噪声点的干扰,需要对原始点云数据进行去噪处理,本文中结合高程分布直方图和k维树对在高程空间分布上比较孤立的少量噪声点进行去除。因为LiDAR系统发射的激光脉冲具有一定的穿透力,穿过植被的树叶或枝干时会产生多次回波,但遇到建筑物或地面时只有一次回波信息,因此,地面点一般存在于具有单次回波和多次回波的末次回波点云集合中,为了减少滤波处理的数据量,本文中利用点云的回波次数信息先去除部分非地面点。
1.2 改进的电力线点云滤波算法
对获取的无人机机载LiDAR点云进行滤波处理有利于更加准确的提取电力线点云。常用的滤波方法主要有基于坡度的、形态学的、分割的、不规则三角网的以及曲面拟合的[17]。针对输电线走廊地形起伏较大的特点,本文中拟采用基于曲面拟合的算法[18]对电力线走廊进行滤波,为了提高滤波的准确性,对传统的曲面拟合滤波进行改进,采用基于格网划分的曲面拟合滤波算法,其流程图如图1所示。

Fig.1 Improved surface fitting filter algorithm flow chart
具体步骤见下:
(1)对电力线走廊进行1级虚拟格网划分,1级格网的大小为区域内建筑物的最大尺寸,将各1级格网内的最低点作为地面种子点。
(2)用步骤(1)中得到的地面种子点建立3级虚拟格网,为了满足曲面拟合所要求的每个2级格网内至少有6个及以上的地面种子点的条件,建立的3级格网边长需不小于m,m的计算公式为:
(1)
式中,M为地面种子点的总数量,S为测区面积。
(3)按从上到下、从左到右的顺序对各格网内地面点数量进行判断,若2级格网内地面点数量不小于6个,则进入步骤(5),否则进入步骤(4)。
(4)当2级格网内地面种子点数量少于6个时,将下一个2级格网内地面点合并至当前2级格网,直至地面种子点数量不小于6个;若合并至某一行的最后一个2级格网时,其地面点数量仍不足6个,则将后面所有的2级格网合并入前一个符合曲面拟合条件的格网块中,重新进行曲面拟合。
(5)利用格网块中的地面种子点进行最小二乘曲面拟合,计算二次曲面参量。
(6)遍历所有待判断点,将其平面坐标带入二次曲面方程中得到拟合高程值,拟合高程值与真实高程值差值的绝对值就是各点的拟合高程差。
(7)将拟合高程差小于设定阈值的点标记为地面点,纳入到地面点集合中。
对输电线走廊点云进行改进的曲面拟合滤波处理后,得到的地面点集合中仍包含部分低矮植被点以及与地面相连的塔杆点,为了得到更精确的地面点集合,再次利用形态学开运算[19]对低矮植被点以及与地面相连的塔杆点进行去除。
1.3 电力线点云数据提取
1.3.1 电力线点云分段 点云的高程归一化处理的方法是用数字表面模型减去地面点生成的数字高程模型。对去除了地面点和高程归一化处理后的电力线走廊点云进行分段切割,用垂直于电力线走向的竖直平面分割电力线走廊点云,为了使得塔杆点最多存在于两个相连的分割段内,分割的距离一般选取为塔杆的边长l,这样就将电力线走廊分为了为N段,N用下式计算:

(2)
式中,L是电力线路的总长度,int表示向下取整。
1.3.2 电力线点云高程区间划分 对于分割后的每一个立方体空间,按照一定的高程间隔h从最低点往上进行高程划分,每一个立方体空间被划分为n个区间,h的取值要不小于两倍的扫描点平均间隔,n的计算公式如下式所示:

(3)
式中,Zmax,Zmin表示的是此分段内的高程最大值和最小值。电力线走廊点云分段和高程区间划分的示意图如图2所示。

Fig.2 Schematic diagram of power line segmentation and elevation stratification
1.3.3 电力线点云粗分离 通过计算分段分层后每一区间内的点云数量来对电力线点云进行粗分离。在各分段内,如果从下到上每个区间内都有点云存在,说明此分段是包含塔杆点云或者高大树木的分段,如果分段的某些区间不存在点云,则说明此分段是包含电力线点云的分段。对于包含电力线点云的分段,从最下层区间统计区间内的点云数量,当遇到第1个没有点云的空区间,则记下此区间上区间的高程值h1,继续往上统计各区间的点云数量,在此之后遇到的第1个点云数量不为空的区间,则记下此区间下区间的高程值h2,取h1和h2的中间值(h2-h1)/2,依据此中间值将此分段一分为二,则上方的点云就是粗分离得到的电力线点云;对于包含塔杆或高大树木点云的分段,可以取左右相邻分段高程分割值的平均值对其进行划分,得到粗分离后的电力线点云。
1.3.4 电力线点云的精确提取 经过粗分离得到的电力线点云还会包含部分塔杆点、绝缘子点以及高大树木点,需进一步对电力线点进行精提取。将粗分离后得到的电力线点云投影到水平面上,由于电力线点投影到水平面上时是1条直线,因此,本文中采用2维直线Hough变换[20]对电力线点进行精提取。2维Hough变换就是将平面上的点映射为Hough空间中的正弦曲线,利用Hough变换检测2维平面中的直线就是检测Hough空间中各条正弦曲线的交点,过某个交点的曲线数量越多,反应到2维平面中就说明越多的点处在同一条直线上,提取交点的信息就可以反推得到2维平面中的直线信息。
2 机载LiDAR电力线点云重建
利用2维Hough变换对电力线点进行精提取后,得到在水平面投影上处于同一直线上的电力线点集合,但是此集合中的电力线点包含了空间中不同高度的电力线点(如图3所示),其中也会夹杂着少量与电力线点距离很近的绝缘子点、塔杆点和高大树木点,因此需要在铅垂面xOz上(如图3所示)对电力线点进行二次分离与提取以便剥离出单根电力线点。

Fig.3 The spatial distribution of power line point cloud
通过分段和k均值聚类求取每一段的局部质心坐标值,并把它作为采样点,然后利用采样点对电力线进行最小二乘拟合,具体的步骤见下:
(1)将精提取得到的电力线点云按照第1.3.1节中的方法分段。
(2)假设在每段的1/2处有一垂直于分段电力线点云的竖直面。
(3)将分段内的所有电力线点投影到此竖直面上。
(4)对位于此竖直面上的电力线点进行k均值聚类。
(5)求取各聚类中所有点的局部质心坐标值(x,y,z),并且从上到下进行标号1,2,3…,局部质心坐标的计算公式如下式所示:

(4)
式中,i表示投影到竖直面上点的编号,n表示的是投影到竖直面上的总点数,m表示权值,是各点到聚类中心点距离的倒数。
(6)对标号相同的局部质心点进行最小二乘拟合,本文中采用的是直线和抛物线相结合的间接式重建方法,将点云投影到xOz面上,利用直线方程和抛物线方程建立电力线模型,如下式所示:
(5)
式中,d是原点到直线的垂线段距离,α是该垂线段的倾斜角,z是高程坐标,a0,a1,a2为方程中的待求参量。
当对所有标号相同点都进行拟合后就完成了所有单根电力线的重建。
3 工程实例及精度评定
3.1 数据源
为了验证本文中提出电力线点云提取和重建算法的可行性,选取某实测电力线走廊数据进行试验,此数据由DJI-M600无人机搭载HS-600 LiDAR测量系统获取。测区面积约为24290m2,线路总长约352m,共扫描点云1036689个,测区不仅地形起伏大、植被茂密,还存在部分水域。对原始点云数据进行去噪和回波次数判断处理,得到的电力线路走廊点云如图4所示。
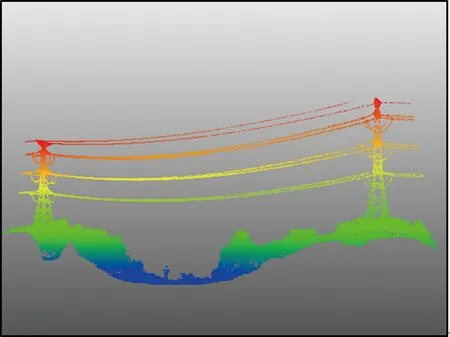
Fig.4 Power line point cloud data after denoising and the number of echoes are judged
3.2 实例计算
对去噪和回波次数判断后的电力线走廊点云进行滤波处理,1级格网边长设置为塔杆边长为10.5m,根据得到的地面种子点数量,结合(1)式可知,2级格网边长m=24.5,依此建立边长为26m的2级格网。按顺序对每个格网进行曲面拟合滤波,设置的拟合高程差阈值为0.5m。对所有格网完成改进的曲面拟合滤波后,再使用形态学开运算进行二次滤波以去除少量的低矮植被点以及与地面相连的塔杆点,形态学开运算的窗口同样选取为塔杆的边长。两次滤波后得到的地面点如图5a所示,非地面点如图5b所示。
对电力线走廊点云进行高程归一化处理,然后再进行分段,分段的间距是塔杆的边长,由(2)式计算可知分段的总段数N=34。对每一分段进行高程区间划分,由于本文中数据的点云间隔大约是0.15m,因此选取的h=0.3m,各分段的高程区间数量由(3)式计算可得。通过判断各高程区间内的点云数量进行电力线点云的粗提取,粗提取得到的电力线点云如图6所示,其中包含了大量的塔杆点和绝缘子点。

Fig.5 Ground point and non-ground point after filtering
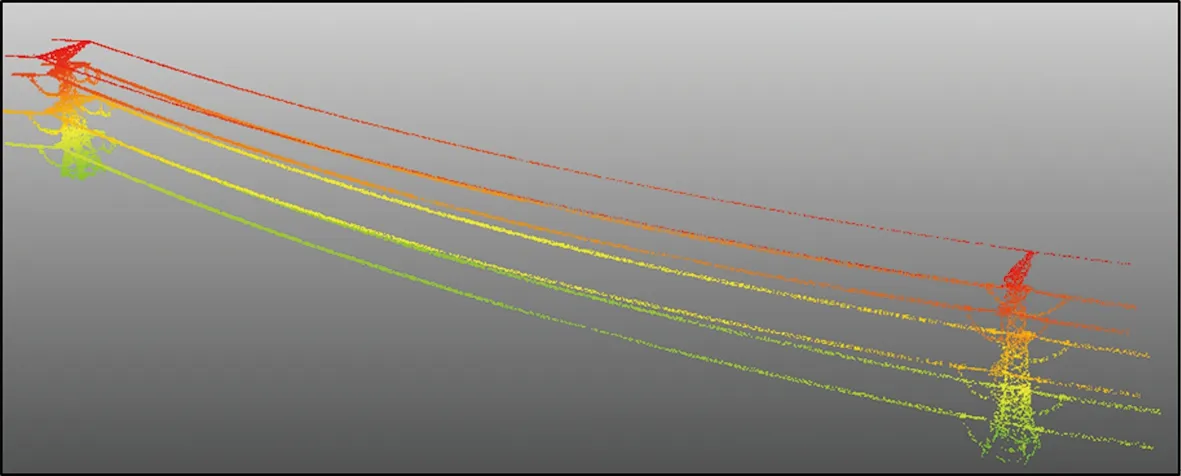
Fig.6 Power line point cloud containing a large number of tower poles and insulator points obtained by coarse separation
将粗提取到的电力线点云投影到xOy水平面,先用2维Hough变换对电力线点云进行精提取,然后计算位于同一条直线上两点间的最大长度并作为此电力线的长度,设置电力线的长度阈值为各档电力线长度的1/2,将长度小于阈值的直线及其所属的点云删除。Hough变换提取到的电力线点云如图7所示。
2维Hough变换提取到的点云是在xOy平面上处于同一条直线上的电力线点集合,但是此集合中的电力线点是由空间中不同高度的电力线点重合而成的,其中也会夹杂着距离电力线很近的绝缘子点和塔杆点(如图7中的放大图所示),因此需要在xOz铅锤面上(见图3)作二次的分离和提取,通过分段和k均值聚类进行采样,最后使用抛物线和直线结合的电力线模型对采样点进行最小二乘拟合实现电力线的重建。最终重建得到的电力线如图8所示,用不同的颜色对不同的电力线加以标注。

Fig.7 Power line point cloud extracted by Hough transform

Fig.8 The final extracted and reconstructed power line point cloud data
3.3 精度评定
目前,主要通过电力线点提取的完整率以及电力线模型重建的精度和效率来对电力线提取与重建算法的性能进行评价。使用本文中算法、方法一[8]以及方法二[9]对同一实测数据进行电力线点云的提取,各方法提取电力线点的完整率统计结果如表1所示。对于算法效率的评定主要是依据各算法耗费的时间。此外本文中采用原始点云到重建模型的空间距离作为评价指标来对电力线重建精度进行判定,分别计算各实测电力线点到模型中对应点空间距离的均值Dmean、最大值Dmax以及最小值Dmin,并与已有的方法一和方法二进行比较,计算结果如表2所示。
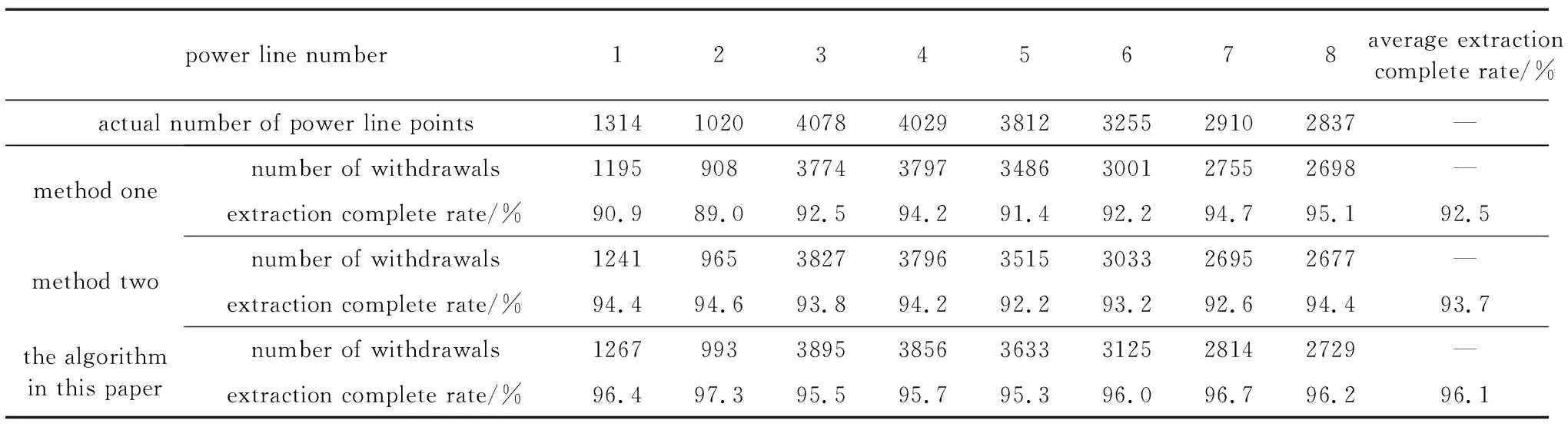
Table 1 The complete rate of each power line point extraction
分析表1可知,本文中提出的电力线点云提取算法具有较高的提取完整率,平均的提取完整率达到了96.1%,相比与方法一和方法二能够更完整地对电力线点进行提取,说明本文中所提出的算法可以准确地识别出单档单根电力线点,并以较高的提取完整率对电力线点云进行提取。

Table 2 Statistical results of different power line reconstruction models
分析表2可知,本文中提出的电力线模型重建方法与方法一相比,重建精度有所提高,无论是Dmax,Dmin还是Dmean,本文中的算法都要优于方法一;在重建效率方面,本文中方法和方法一对于不同电力线重建的平均耗时分别为5.0s和8.5s;在最大耗时方面,本文中的方法相比于方法一最多减少了50%左右。本文中的方法与方法二相比,在重建效率方面两种方法比较接近,对于不同电力线重建的平均耗时分别为5.0s和5.1s;在最大耗时方面,本文中的方法和方法二之间最大也只相差7%左右;在重建效率相接近的情况下,本文中的方法相比于方法二Dmean明显较小,重建的电力线模型精度也相应的较高。综合而言,本文中的提出的电力线重建方法与既有的方法一和方法二相比,拥有更佳的性能,具有相对较高的重建效率与精度。
4 结 论
随着电力线路走廊智巡时代的到来,基于机载LiDAR的电力线提取与重建已经得到了越来越广泛的运用,本文中在深入分析已有的电力线提取与重建算法的基础上,在改进的点云滤波基础上,提出一种综合电力线点云分步提取、分段k均值聚类采样及结合直线和抛物线拟合的电力线点云提取与重建方法,通过DJI-M600无人机机载HS-600 LiDAR测量系统的实测数据进行试验,验证了本文中算法在电力线点云提取与重建方面的准确性和高效性,适用于对基于无人机机载LiDAR电力线点云的提取与重建。
