微循环电动客车12 V电子驻车系统设计
2021-08-16曾新
曾 新
(厦门金龙联合汽车工业有限公司,福建 厦门 361023)
1 概述
目前社区巴士常采用小型电动客车,车身小巧,往返循环距离很短,所以又称为微循环电动客车。其车身长度一般在6 m左右。与传统机械驻车制动相比,电子驻车制动(EPB)可通过CAN通讯实现控制及故障反馈,提高驻车安全性,已广泛应用于微循环电动客车上。由于微循环电动客车与乘用车长度相近,而乘用车零部件相对成熟可靠,乘用车电压平台为12 V,故在开发微循环电动客车EPB时,12 V EPB为常选配置。
EPB[1]系统是指汽车通过电子线路控制驻车制动。车辆起步时可不用手动释放EPB,踩油门时EPB将自动释放;断电时,可自动开启EPB;可实现自动驻车,提高驻车安全性。为保证安全性,EPB系统应具有高可靠性,需要从匹配配电供应、控制器布置、故障报警等方面开展研究。
目前,EPB的电压平台分为12 V和24 V。本文阐述12 V电压平台拉索式 EPB的设计。由于客车电气系统电压平台为24 V,故设计12 V电压 EPB时,电源选型匹配成为重点及难点。拉索式EPB是由电机驱动拉索实现驻车,其特点是启动电流大、大电流持续时间长,启动电流最大瞬间可达50 A,电流持续时间约100 ms。如电源匹配不当,将造成启动瞬间电压(9~16 V)不稳定,EPB系统电机执行器无法正常拉起或释放,为微循环客车安全驻车留下隐患。这是目前12 V 电压平台EPB最常见的问题。本文为解决该问题提供一种设计方案。
2 系统组成及应用流程
2.1 系统组成
EPB系统如图1所示,其中仪表系统4通过CAN总线[2]8与EPB控制器6连接,降压器7与EPB 控制器6通过导线连接。EPB控制器6及微处理器10实现数据处理功能,CAN总线8提供通讯传输介质,实现数据交互。图1中箭头指示定义:空心单箭头为电源单向传导,空心双箭头为电源与信号互相关联,双实心箭头代表CAN通讯线束。
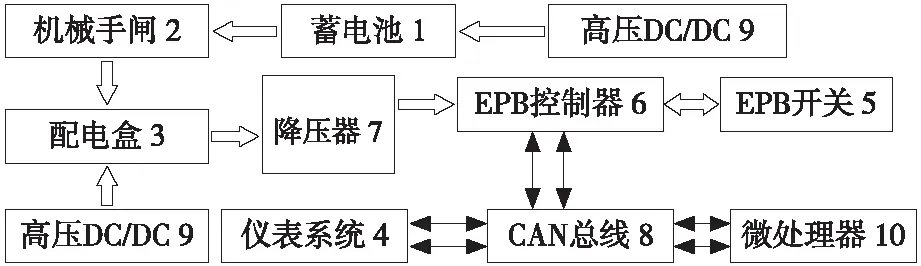
图1 EPB系统组成示意图
2.2 系统CAN通讯及仪表显示
2.2.1 系统CAN通讯
本系统采用CAN总线技术[3]进行控制,EPB更具安全性、实时性、灵活性。其中仪表系统通过检测EPB控制器CAN报文数据,获取EPB控制器的故障及工作状态、EPB系统电压及电流[4]等所需数据;仪表系统将所获得的数据发送至微处理器分析后,微处理器通过CAN总线使仪表系统与EPB控制器连接,实现控制输出,仪表界面反馈出EPB系统的工作参数。调试人员通过CAN总线读取数据,对整个EPB系统进行诊断分析。
其中微处理器、EPB控制器和仪表系统内部都包括CAN收发器和CAN控制器,并采用SAE J1939作为CAN总线的通讯协议[5]。CAN控制器和CAN收发器在内部相连,CAN收发器通过CAN总线实现外部互相连接。
2.2.2 系统仪表显示
为保障EPB系统正常工作,消除安全隐患,EPB系统工作状态参数(如电流、电压)及故障信息能及时有效反馈,EPB系统需接入到CAN总线[6]中,通过CAN通讯来告知仪表显示系统状态及故障信息。仪表系统作为车辆的运行数据终端界面,实现人机交互作用,EPB系统替代传统机械驻车系统在这种情况具有绝对的优势。EPB系统仪表常用指示符号片有:系统工作正常指示符号、系统故障指示符号、系统临时驻车指示符号(AUTO HOLD)。
2.3 系统电源匹配
图1中客车蓄电池1的电压平台为24 V (充电电压介于24~28.8 V之间,由于纯电动车高压DC/DC 9转换出来的正常电压值通常为27.6 V,所以充电电压也通常设为27.6 V),即降压器7选型时输入端电压值通常为27.6 V。12 V系统EPB设计时,需通过降压器7把电压稳定在9~16 V之间,给EPB提供正常工作电压,在匹配电源时,降压器的性能指标极其重要。
如某品牌12 V EPB系统参数如下:正常工作最大电流[7]为25 A,拉起或释放瞬间电流最大可达50 A,电流持续时间100 ms,稳定工作电压为9~16 V,其匹配的降压器7电流输出能力至少为瞬间电流的1.2倍即60 A,电流持续稳定输出时间不少于2倍即200 ms为宜;降压器7输入端的保险器选取应是正常工作时最大电流的1.2倍即30 A慢熔座式保险为宜,降压器7输入电源应稳定在27.6 V。
2.4 系统布置要求及线径匹配
由于12 V是低压系统,为减小线阻压降,要求线阻要尽量小,如电压降控制不当,将导致系统不能正常工作,具体可以从电气件布置和线径匹配实现线阻压降控制:
1)电气件布置要求。蓄电池1、高压DC/DC 9、机械手闸2、配电盒3、降压器7及EPB控制器6需相互间尽量就近布置,如无法满足所有件就近布置,一定要确保降压器7和EPB控制器6两者就近布置要求,两者之间电源线束长度距离不应大于2 m为宜。原则是在满足布置需求的情况下,线束越短越好,进而减小线阻。
2)针对上述某品牌12 V EPB系统,根据线束过电流能力,电源线束线径选取应大于4 mm2。原则是线束在可满足连接器匹配(连接器最大过电流和压接线径)的情况下,选择尽量粗的线束,增大导线横截面积以有效降低线阻。
另外还采取以下措施:
1)降压器7搭铁需和蓄电池负极接线柱直接连接,以有效减少接触电阻。
2)降压器7的连接器需选择接触电阻小且连接可靠的品牌产品,以有效减少接触电阻。
3)EPB开关5到EPB控制器6的信号线的最小线径应不小于0.75 mm2,以满足正常线路要求。
4)EPB开关5到EPB控制器6保险器应单独设置,不允许和其他系统并接供电。
2.5 EPB 系统控制策略
设计EPB系统时,EPB系统需要对驾驶员的操作有准确的判断,EPB控制器接收到开关信号时,还需结合整车CAN总线上的数据[8]来判断是否可以响应开关动作信号,在确保安全的情况下才能执行相应的动作指令。
1)驻车拉起。驻车拉起主要是静态下驻车,当车辆停止时,驾驶员直接拉起驻车开关实现静态驻车;当驾驶员忘记拉起驻车开关且钥匙由ON挡直接下电时,EPB系统还可以自动驻车,并保持驻车动作到下次开关信号触发解除;也可以实现智能化临时自动驻车功能,即按下临时自动驻车按钮(AUTO HOLD)后(该按钮集成于EPB开关5中),当车速为零时,若踩住制动踏板时间超过5 s以上,可在等红绿灯时不拉驻车开关情况下,实现自动驻车。当要起步时,踩油门到一定深度即可自动解除驻车制动。车辆行驶时,如遇到脚制动失灵,常拉起EPB开关不放,EPB系统还可实现动态辅助制动。
2)驻车释放。要释放驻车制动时,需踩住制动踏板,操作EPB释放开关,即可解除驻车制动。在确保安全的情况下,也可以踩住油门到一定深度实现起步自动释放,即车辆ON挡上电状态,挡位在前进或后退挡,结合整车相关信号需求,驾驶员踩油门到一定深度时,EPB也可自动松开驻车制动。还可根据坡度大小进行智能调整,以防溜坡。
3)充电驻车。出于安全考虑,纯电动车充电时需判断车辆是否处于驻车状态,车辆未处于驻车状态时不允许充电。EPB系统工作时电源供电有两种,即唤醒电源和主供电电源,分别对应控制方式为钥匙ON挡电和常电(即蓄电池1通过机械手闸2接通电源)。钥匙ON挡电断开时,唤醒电源断开,EPB系统控制器进入休眠,10 s后不再对外发出驻车信号。考虑到充电控制策略需求,即充电时需通ON挡电唤醒EPB控制器,并由常电提供控制器正常工作电源,EPB控制器通过CAN总线发出驻车信号报文,整车控制器VCU接收到信号后,才能执行充电逻辑判断,实现静态安全充电。设计人员容易忽略此细节,导致充电失败。
3 结束语
本文阐述12 V EPB系统的设计方法,利用CAN总线技术可实现对12 V EPB系统控制及故障反馈,明确电源选型及线径匹配原则,指出设计人员在匹配中容易忽略的细节,为EPB系统的设计提供一种参考。