基于计算机视觉的新型汽车远光灯光强标定方法研究与实现
2021-08-15康敬欣曾德斌
李 策,康敬欣,曾德斌
(1.北京化工大学机电工程学院,北京 100029;2.弥荣(北京)交通科技有限公司,北京 100086)
引言
汽车前照灯在夜间行驶过程中扮演着重要的角色,其中远光灯的发光强度对于行车安全尤为重要。远光灯发光强度过高,会造成迎面驾驶人员眩目,阻碍其视线;光强过低,又会造成司机无法在昏暗条件下辨别路况。两种情况都极易引发行车事故。为避免汽车的不良灯光状况影响夜间驾驶安全,汽车车灯在出厂前一定要根据国家标准严格检测。
传统的检测方法有屏幕法、基于光电传感器的灯光仪检测法等,这些方法在实际测量过程中普遍存在着误差大、效率低等问题,从而使得车灯的性能无法得到可靠保证。随着机器视觉技术的发展,基于CCD相机的前照灯检测法逐渐兴起,国内外学者对基于机器视觉的前照灯检测进行了不同程度的研究与试验,在近光灯光型、光强检测等方面取得了较好的效果[1-5],但对于远光灯,由于其发光强度过大而产生的相机过曝、像素失真等问题的存在,目前对其光强检测仍存在着较大误差[6]。
本文在前人研究的理论基础上,提出一种控制感兴趣区域(ROI)平均灰度值调节曝光时间的算法,用于远光灯光强标定,以防止因图像过曝或像素失真导致的检测误差,从而提高远光灯光强检测的鲁棒性。
1 理论依据
CCD相机灰度与照度的标定公式为[7]:
(1)
式中:E是照度值,G是图像灰度值,gv是相机增益即曝光补偿,t是曝光时间,a、b为系数,与照射物体到光源的距离有关。
汽车远光灯口径较大,在测量时不能近似为点光源,而作为面光源参与分析。对于发光面为圆形的菲涅尔光源,当其发光面为朗伯体时,在距光源一定距离处测得的发光强度可以表示为[8]:
I=El2
(2)
整理得到光强与灰度公式:
(3)
式中:I是光强(光度),l是光源到被照射物体的距离。
分析上述公式,我们可以得出下面两种标定光强的方法。
(1)当距离和增益一定时,固定曝光时间,光强I和与灰度G线性相关。将一定范围的光强值与灰度值等比例对应,形成灰度与光强的数值对应表。
此方法存在如下两个问题:
a)当发光强度超过标定范围时,便无法计算出实际发光强度。
b)单位灰度很小的误差扰动会使测量结果产生巨大误差。这是由于数字图像的灰度值范围是0~255的整数区间,而对应车灯的光强标定区间能达到105数量级。
(2)当距离和增益一定时,由式(3)可得:
(4)
其中k=al2/gv,d=-b/l2。

由公式(4)可知,在确定的发光强度下灰度与曝光时间存在如下关系:
(5)
为了能准确调节图像的目标灰度值,本文根据式(5)提出了一种实现相机自动调节曝光时间的迭代控制算法以实现灰度值范围的固定,计算流程如图1所示。

图1 相机自动调节曝光时间的迭代控制算法流程图Fig.1 Flow chart of iterative control algorithm for automatic exposure time adjustment of camera
图中Gtarget、Gture分别是灰度值的目标值和实际值,Ttarget、Tture分别为曝光时间的目标值和实际值,tolerance为容差即目标灰度取值范围。当灰度值的实际值与目标值之差的绝对值超差时,不断迭代直到误差值控制在允许的容差范围内。
2 标定系统的组成
汽车远光灯光强标定系统组成如图2所示。
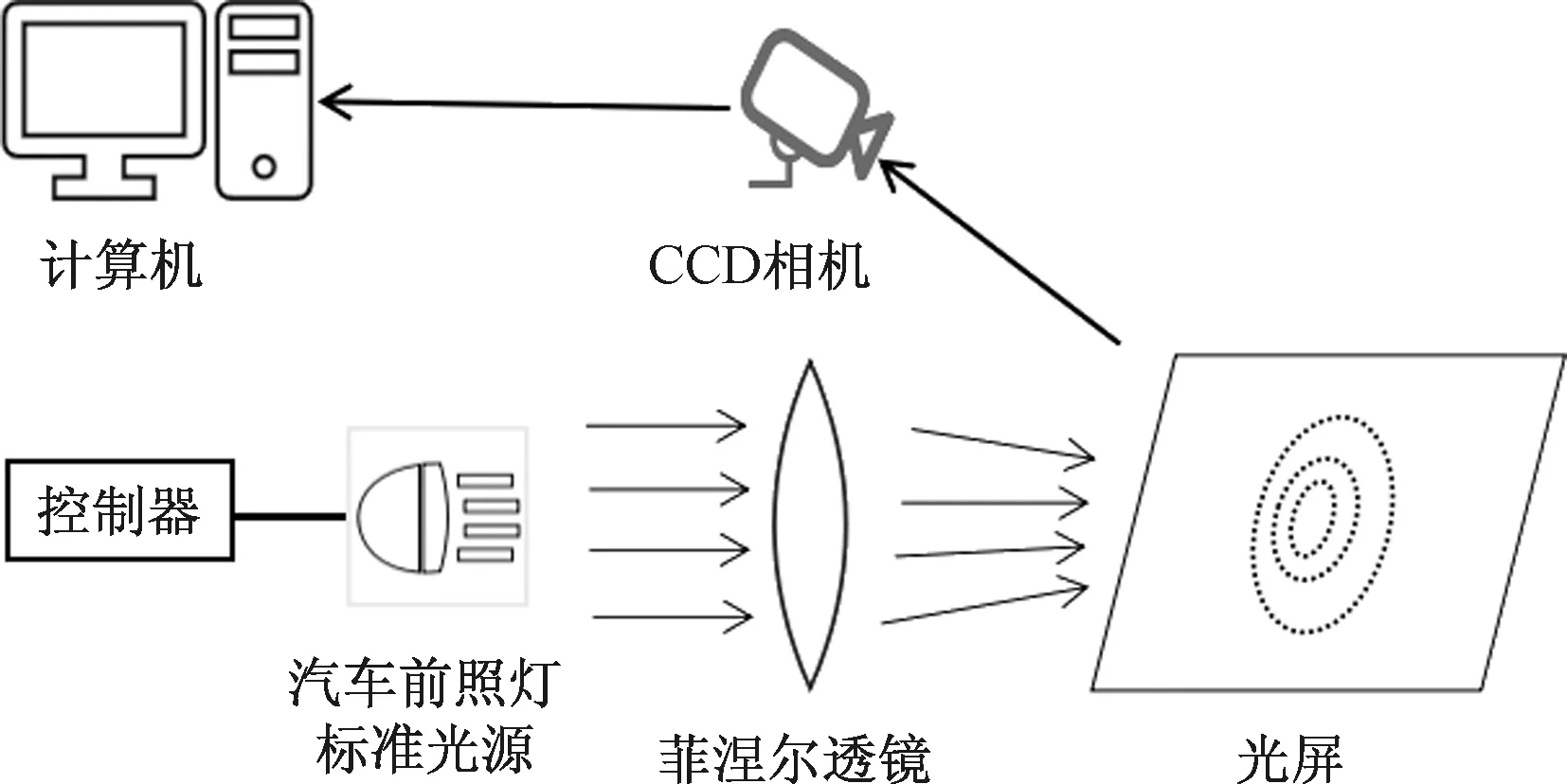
图2 汽车远光灯光强标定系统Fig.2 Automobile high beam luminous intensity calibration system
标定系统由计算机、CCD相机、车灯光源、菲尼尔透镜、光屏等硬件组成。CCD相机采用型号为Mako G-032B 的AVT工业相机,镜头焦距为8 mm。光源为日本弥荣株式会社制造的型号THL-YS-3的标准远光灯,如图3所示。该设备可以通过调节电压控制器来输出不同强度的灯光。相机、光屏、菲涅尔透镜安装于灯箱中形成整体设备,如图4所示。系统软件利用python3.7和AVT相机软件Vimba3.0开发完成。

图3 THL-YS-3标准远光灯Fig.3 ThL-YS-3 standard high beam

图4 集成灯箱Fig.4 Integrated light box
3 远光灯数字图像处理
由于镜头畸变、外界光线等因素的影响,在图像分析前,要先进行相机矫正、图像降噪等一系列处理。
3.1 相机的标定
所有的光学相机都存在畸变问题,这是由透镜的固有特性决定的。畸变会造成图像失真,导致我们无法获得像素在图像上的真实坐标。为了获得接近真实的图像,我们使用OpenCV计算机视觉库中内置的张正友标定法对相机进行标定。
首先,用CCD相机对精度为0.001 mm的标定板进行不同角度和距离的拍摄,将拍摄的图像利用calibrateCamera函数进行标定,计算得到相机的外参矩阵和畸变系数。利用得到的参数和getOptimalNewCameraMatrix命令,可实现图像的矫正。图像矫正前后对比如图5所示。
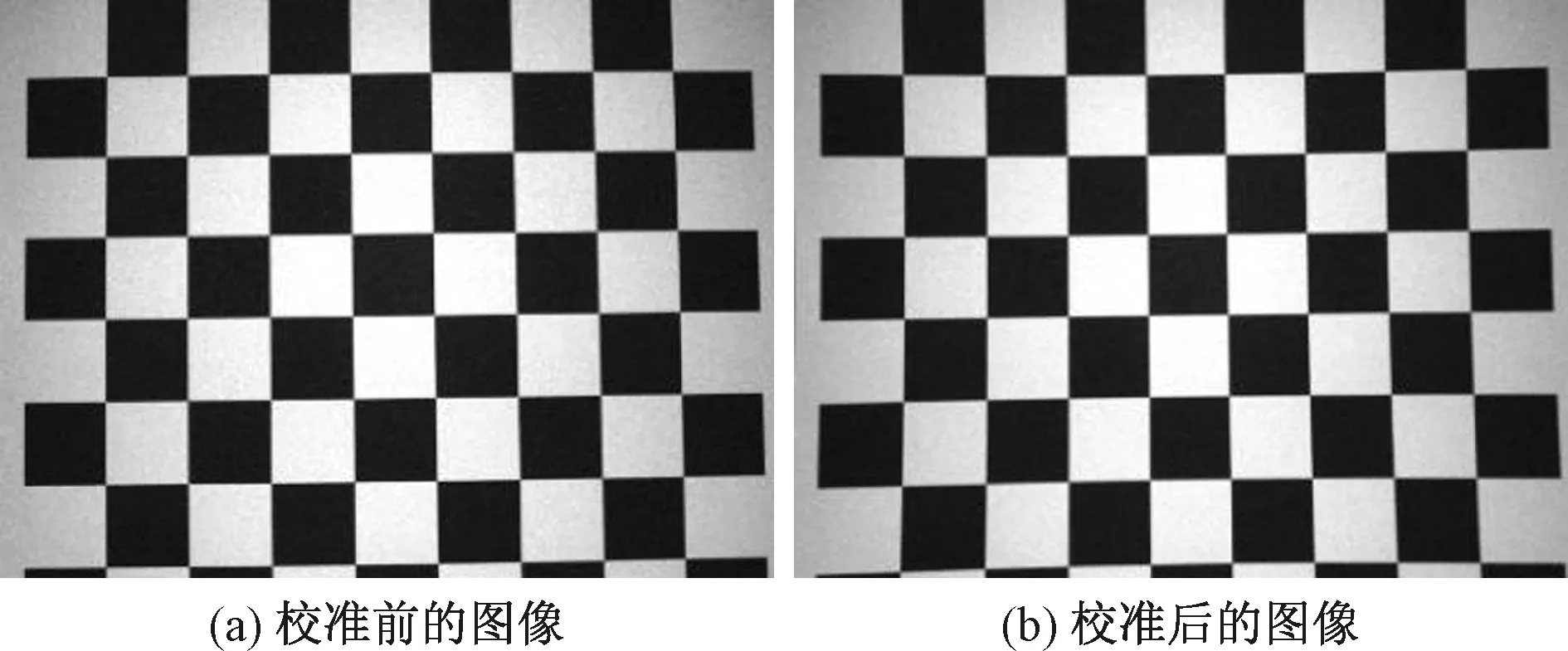
图5 图像校正前后对比Fig.5 Contrast before and after image correction
3.2 远光灯图像处理
为了使远光灯实时检测的效率和准确性得到有效保证,经过CCD相机获取的图像要经过一系列的图像处理最终确定ROI。
3.2.1 图像预处理
首先对图像进行预处理,将RBG图像转换为灰度图像,然后使用中值滤波和闭运算对图像进行降噪并消除图像中的黑点噪声(图中黑点是光屏中心小孔,用于激光定位与测距)。处理前后的图像如图6所示。

图6 降噪处理前后对比Fig.6 Contrast before and after image denoising
3.2.2 光斑选取
在实际检测过程中,即使是封闭的光箱,也不可避免存在自然光或其他光线产生的亮度较高的细小光斑,如图7所示。针对此问题,本文采取了一种选取最大光斑轮廓的方法。

图7 受到外界光影响的车灯投影Fig.7 lamp projection affected by external lights
首先使用THRESH_BINARY函数对图像进行阈值分割处理,函数公式如下:

(6)
式中:(x,y)是像素坐标,thresh为设定的灰度阈值,src(x,y)是像素坐标的灰度值,dst(x,y)为最终输出的灰度值。
当某坐标的像素灰度值大于设定阈值时输出灰度值等于图像中最大灰度值,小于阈值时则置为0。图8所示为阈值设置为最高灰度的90%的处理结果。
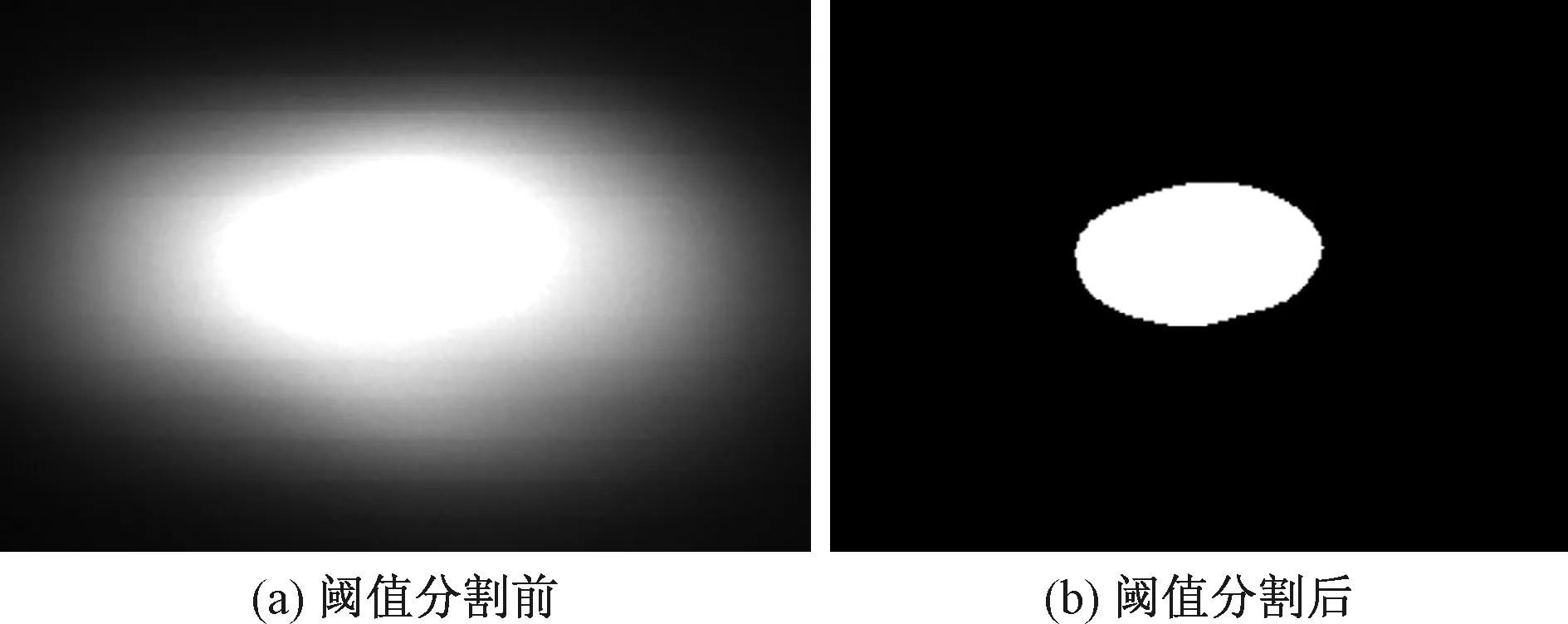
图8 阈值分割前后图像对比Fig.8 Image comparison before and after threshold segmentation
然后使用findContours函数对图像中所有白色区域的轮廓进行遍历。
最后提取面积最大的轮廓坐标,用于抠取经过预处理之后的图像;若未检索到轮廓,则将整幅图设置为最大轮廓,检索效果如图9所示。

图9 车灯投影时检索效果Fig.9 Retrieval effect with lamp projection
3.2.3 选取ROI
汽车远光灯亮度大小由内到外逐次递减。在标定时,理论上应选择光斑中心区域,但实际检测过程中由于车灯质量存在差异,部分远光灯存在光型偏移、缺失、畸变等问题,造成光强分布不均,所以在标定光强时不能简单地对应光斑中心灰度值。针对此问题,可以采取以灰度重心即灰度值权重质心作为跟踪点,找到光斑最亮区域。灰度重心表达式为:

(7)
式中(x,y)是像素坐标,f(x,y)是坐标的灰度值,Ω是求取灰度重心的目标区域。
为了控制目标区域灰度值,本文通过控制平均灰度的方法,来控制ROI的整体灰度。当灰度值范围跨度较大时,灰度值较低区域将使平均灰度的取值产生很大误差,因此本文将ROI划定为最高灰度值90%以上的光斑区域,为了更好的显示光强的分布状况我们将灰度图转换为伪彩图,不同灯型的ROI选取如图10所示。
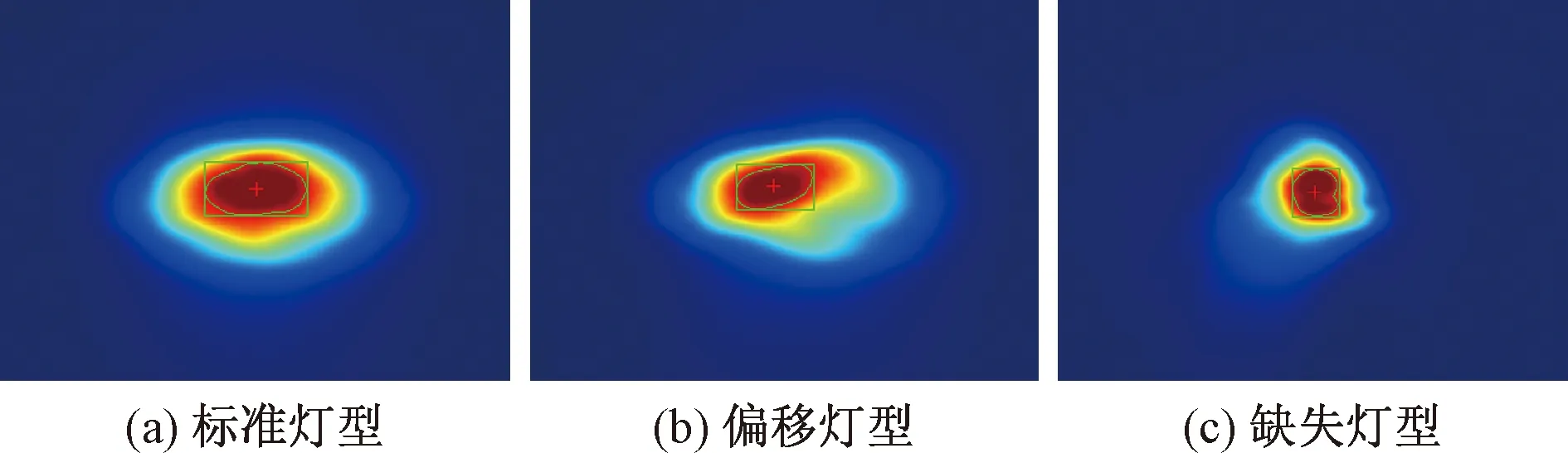
图10 不同光型的ROI选取效果Fig.10 ROI selection effects of different light types
3.2.4 计算平均灰度
由于在实时检测过程中,外界环境和系统内部的误差扰动会导致输出的图像不平稳、灰度值不断变化,因此本文采用卡尔曼滤波器算法,递归预测图像ROI的平均灰度值,从而进行校正。
一维的卡尔曼滤波算法可表示为:

(8)

(9)

(10)

(11)

(12)
4 标定实验及结果分析
将灯箱置于试验台上,利用激光定位将标准光源对准光屏中心,并放置在距离灯箱1.5 m处。
通过程序命令将CCD相机设置为自动曝光,关闭自动增益,目标灰度分别设置为150、180,容差为±10。实验过程中使用电压调节器调整发光强度,计算机同步进行计算和标定,将测得的灰度与曝光时间的比值与标准光强进行一次多项式拟合,得到的拟合函数式用于光强检测,并计算相对误差。不同目标灰度下的测量数据见表1和表2,对应的拟合函数见图11和图12。
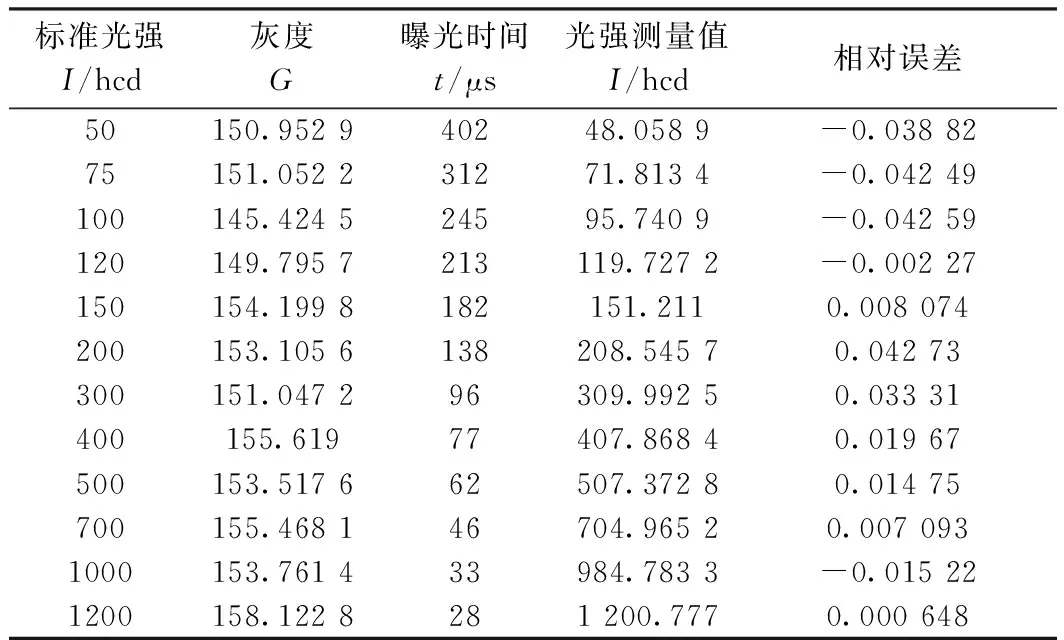
表1 灰度目标150时标定结果
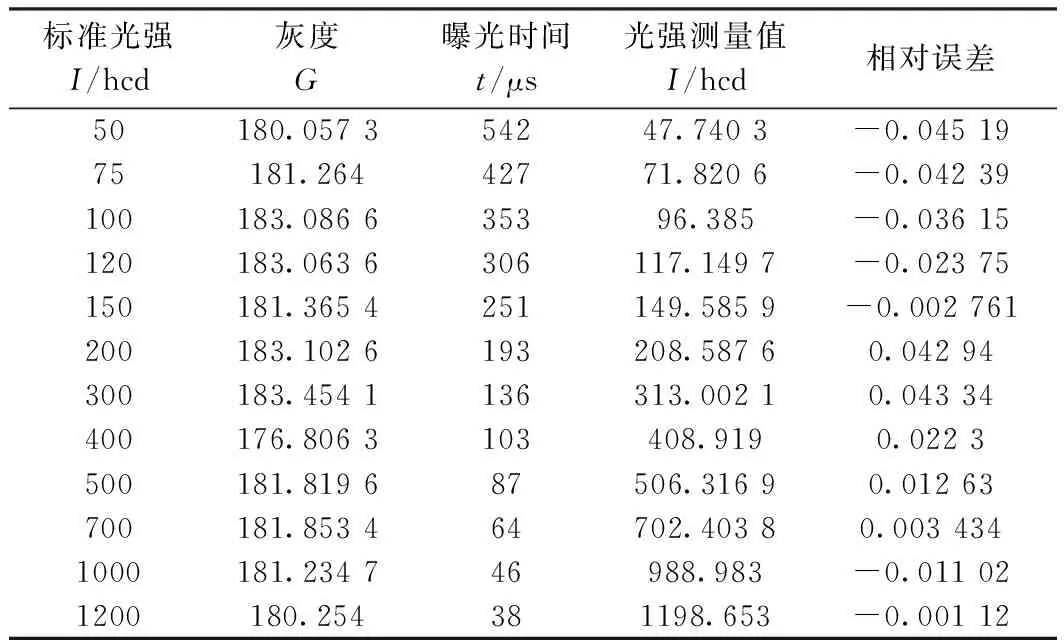
表2 灰度目标180的标定结果
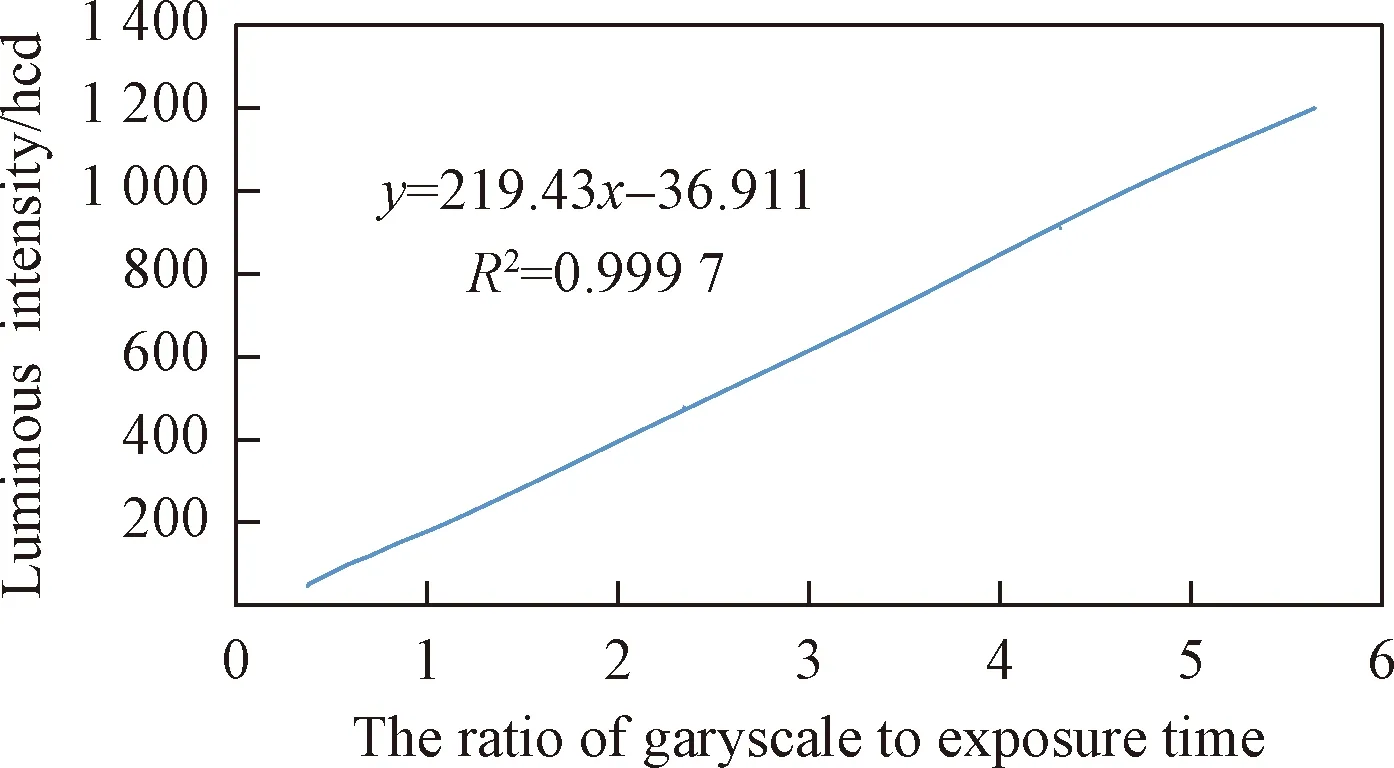
图11 灰度目标为150的函数拟合图Fig.11 Function fitting diagram with gray target of 150

图12 灰度目标为180的函数拟合图Fig.12 Function fitting diagram with a gray target of 180
图中数据表明,拟合方程的确定系数R2达到了0.999 7,拟合效果优异,符合式(4)中所描述的线性关系。由表中光强测量值与标准光强的相对误差不超过5%,低于国标规定的15%的检测误差[10],检测准确性较高。
5 结论
本文根据CCD相机中图像灰度与照度的关系式和圆形菲涅尔光源照度与发光强度的关系式,推导出测量发光强度的理论公式,依据此公式设计了将远光灯光斑图像灰度值与相机曝光时间的比值对标准光强进行标定的方法。通过设计曝光时间控制灰度范围的算法以及使用图像处理技术和卡尔曼滤波器算法,保证在标定过程中图像灰度与曝光时间两个数据的稳定输出,这是上述标定方法的技术基础。利用标定实验得出的拟合关系式,对发光强度进行检测,检测结果与实际值的误差不超过5%,展现出很强的鲁棒性。
基于本文的远光灯标定与检测技术,我们已形成软件与硬件设备,并在实际车厂环境中对前照灯发光强度进行检测,实验表明此设备对远光灯和近光灯光强的检测结果都展现出较强的鲁棒性,获得了厂方的认可并已投入实际使用之中。要注意的是,在利用本文所提出的方法进行远光灯光强检测时,一定要注意严格保持被检车灯与检测设备之间的相对位置和距离,如果发生变动,则需要重新进行标定。
