模拟雾环境下图像特征与主观评价的关系
2021-08-15崔刚刚徐方卉周小丽
崔刚刚,徐方卉,周小丽
(1.复旦大学光源与照明工程系,上海 200433; 2.复旦大学总务处,上海 200433)
引言
雾、霾等自然天气的存在,常常给人们的出行带来困扰,使得驾驶员和乘客很难清楚地辨别交通标示中的指示信息,为交通安全埋下隐患。雾是一种液态分散质的气溶胶,它会对空气中的光波产生散射和吸收作用。在大气中,氮气和氧气虽然含量最多,但在可见光和近红外区不表现吸收作用。水分子是可见光和近红外区最重要的吸收分子,是雾天光学衰减的主要因素。光波在空气中传播时,水分子的吸收和散射会引起光束能量的衰减,影响光束性质,最终影响光学信息的传递。因此,研究雾环境下水雾特性与主观识别之间的关系具有实际的应用意义。
关于雾环境下的研究多集中雾引起的光学性质的变化,例如,视觉可见度[1]、目标识别准确率[2]、RGBY的色度识别[3]、光源的透射率[4]、不同光的透雾能力[5]、光源颜色的亮度特性[6]、光源亮度的视觉特性[7]以及物体颜色的色度值[8]等。本文结合前述研究,在实验室搭建了模拟雾环境实验箱,通过控制变量等数学方法,控制环境温度和湿度,采用加湿器的方法产生水雾,用粉尘仪测量雾浓度,以图像的标准偏差表征图像特征,用主观评级来统计主观评价数据。考虑到交通标示中的背景与目标的信号单一性,本文采用视力表作为图像待捕捉目标,用相机采集通过雾环境的目标图像。以图像特征作为基础,进一步研究图像特征对于主观评价的影响,得到了水雾浓度在自然环境下具有负指数衰减的性质,分析得到了图像特征与主观评价之间的量化关系。本文结论为后续研究提供了可参考的数据依据。
1 实验装置与方法
1.1 模拟雾环境
1.1.1 雾环境装置
空气饱和水汽量与温度的关系如图1所示。当空气容纳的水汽达到饱和值时,多余的水汽量就会液化产生水雾。气温越高,空气中所能容纳的水汽也越多。因此,产生水雾的方式一般有两个:1)降低空气温度;2)增加空气水汽量。本文采用加湿的方法,通过向封闭的实验箱内注入水汽来模拟雾环境。
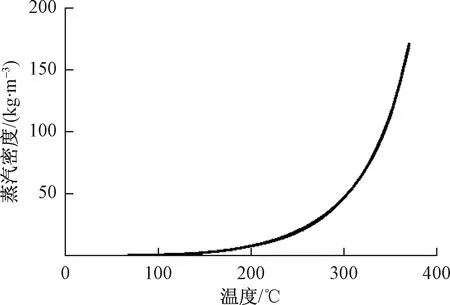
图1 空气饱和水汽量随温度变化曲线Fig.1 The curve of air saturated water vapor volume with temperature
本文采用的雾环境实验箱如图2所示(俯视图)。左侧是灯箱,右侧是相机。实验箱处于暗室中,实验箱的长宽高分别为2 m、0.8 m、1.2 m,由木结构作为主框架,其他部分为泡沫板,在泡沫板表面涂有防反光的黑色涂料。在实验箱的长边两侧各分布有两个加湿器,四个加湿器型号和功率相同,产生的水雾粒径范围为3~10 μm,能够涵盖自然环境中水雾的粒径范围。在实验过程中,对加湿器实施同步开、关和调档等操作,实现实验箱内的雾浓度的均匀分布。加湿器产生的水雾通过长约1 m、直径为5 cm的水汽导管通向实验箱内,为箱内充雾,构造模拟雾环境。在充雾过程中,时间太久会导致观察侧的玻璃雾化严重,即使玻璃上贴有防雾化膜,仍然会出现雾化现象;时间太短会导致雾的最高浓度无法到达最大值。经过多次实验,结果表明,四台加湿器,开启最大档位,连续充雾10 min可以满足以上两个要求。
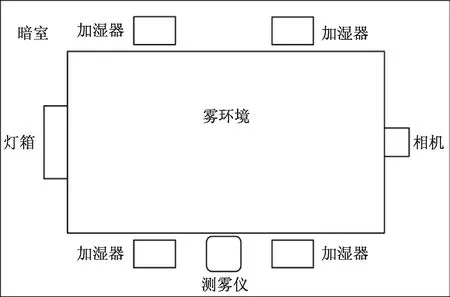
图2 实验箱俯视图Fig.2 Top view of experiment box
在以往的实验中,常采用比值法定义雾浓度,这种方法采用照度计作为接收器,用于接收通过雾环境的光线,通过分别测量无雾状态和有雾状态的照度值,以他们的比值定义雾浓度。本文选择TSI公司的8350EP型号粉尘检测仪测量雾浓度,该仪器的测量粒径范围为0.3~10 μm,符合雾中雾滴粒子的3~10 μm的粒径范围,满足测量条件,可实现准确测量。
水雾中液态粒子在空气中不停地做布朗运动,温度越高,布朗运动越明显。因此,当环境温度较高时,雾消散的会很快;温度较低时,雾保存时间较长。在实验中,在不同环境温度下试验,会得到两条差异较大的雾消散曲线。因此在实验中,会控制环境温度为基本恒定。本文中所有试验数据的环境温度都维持在20 ℃(±2 ℃)温度范围内。
在实验过程中,可以明显观察到,实验箱上侧的雾比实验箱下侧的雾浓度低。根据沉降原理,水雾粒子受重力作用而使质点沉降,此时容器底部的浓度大于上部,造成上下浓度差,而扩散将促使浓度趋于均匀。当沉降作用与扩散作用效果相等时,水雾粒子随高度的分布形成一稳定的浓度梯度,达到平衡状态,即容器底部浓度大,随着高度的增加,粒子浓度逐渐减少,且不同高度处粒子浓度恒定,不随时间而变化。因此,本文采集雾浓度数据时,选取与采集图像时的相同水平面,使得雾浓度与图像数据两者之间有最大的关联性,减小了原理误差。
1.1.2 雾浓度测量
在测量雾浓度之前,先测量环境温度和湿度,预热光源40 min,保证粉尘仪和数码相机的充足电量。连接和组装粉尘仪的检测部件,启动粉尘仪,设置采样时间和采样周期,调试并进行零点校准,使粉尘仪处于正常稳定的工作状态。启动四台加湿器,同时设置10 min倒计时。经过多次实验分析,充雾10 min可以满足实验要求的雾浓度和变化曲线。在充雾时间结束后,关闭四台加湿器,同时按下粉尘仪的启动按钮开始测量雾浓度,粉尘仪会根据设置好的采样时间和周期自动进行数据采集。经过多次实验,雾浓度测量的采样时间达到7 min时,即可满足实验要求。
1.2 图像处理
1.2.1 照明环境与观测目标
本文选用 2 根飞利浦1 050 lm的T8 直管荧光灯嵌入在灯箱内,然后通过光学设计和调整,使得灯箱的光线均匀分布在灯片上,然后以其均匀光对目标进行背光照明。灯片目标,选用E字视力表作为图像采集目标,在交通标识中,背景和目标都为单色,很少有复杂的图案,因此,研究E字视力表有实际意义。图像采集环境如图3所示,其左侧是灯箱和灯片,中间部分是雾环境,右侧是图像采集器。因为雾环境也由图2中的实验箱来实现,因此图像采集器距离灯片的距离为实验箱的长度。
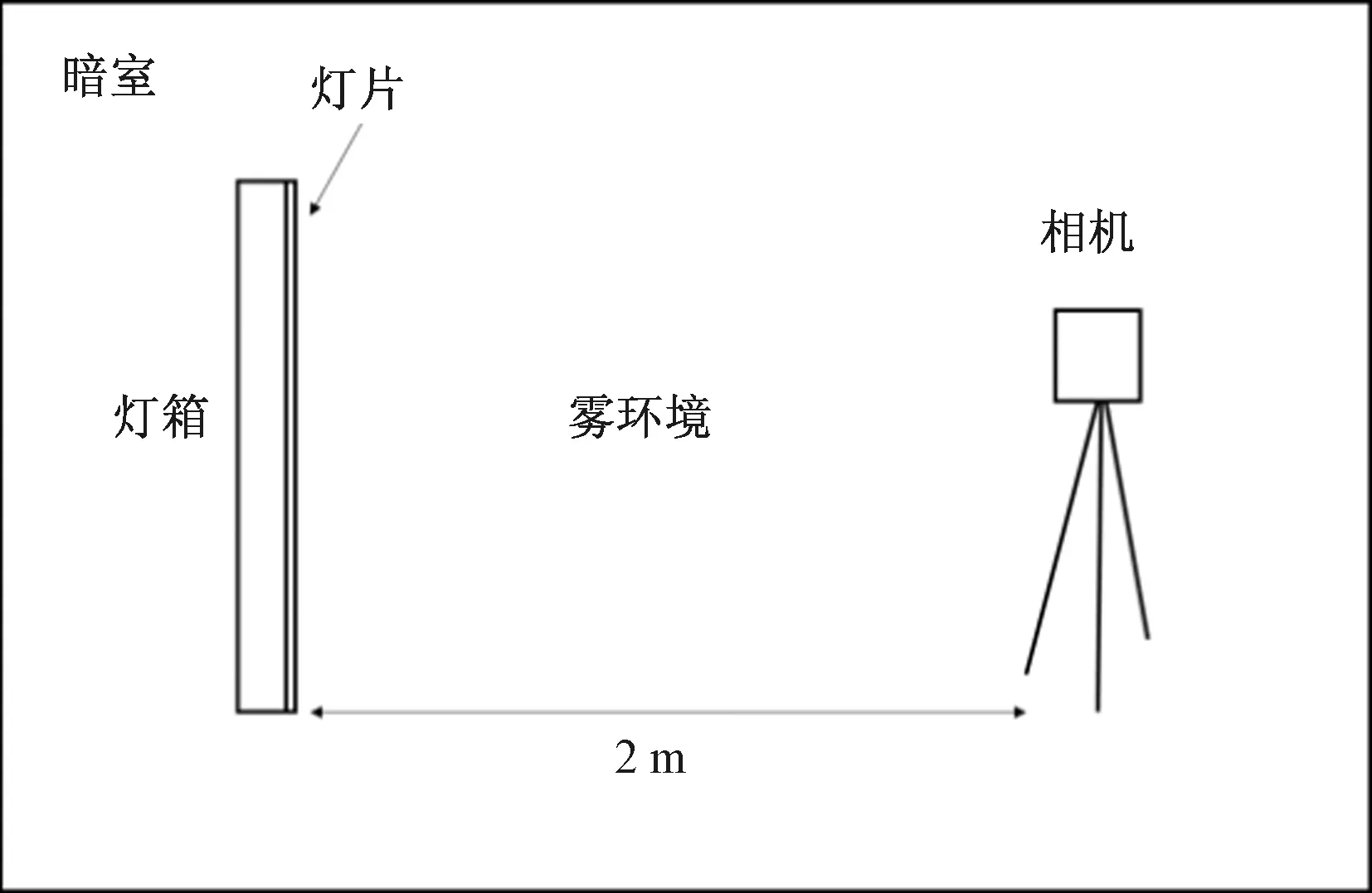
图3 图像采集装置Fig.3 Image acquisition device
图像是光学信息的宏观展现,它间接反应了光线在雾中传输的性质和损耗。本文采用相机对通过雾环境的光线进行捕捉。分析目标经过雾环境的光学传播,形成的图像性质。本文选用索尼Alpha 6000型号微单数码相机作为图像采集器,该种相机采用CMOS传感器类型,能达到约2430万的有效像素,可实现较为理想的图像采集效果。在图像采集结束后,输出采集到的原图作为图像分析的数据。
1.2.2 图像采集与处理
关闭外界照明光源,让实验箱处于暗室环境中。用手机蓝牙模块控制数码相机,观察焦距与相机角度,调试并校准,使相机图像的中心落在待测灯片上,固定相机位置。图像采集周期需要满足两个要求:a)每一次采集动作的完整实现;b)雾现象消散较快需尽快捕捉。经过多次实验验证,图像采集的周期为10 s时,可以实现达到这两个要求。因此,每间隔10 s,通过手机无线控制相机,采集一次图像。待到采样总时间7 min结束后,停止图像采集,导出实验数据,分析结果。本文利用数字图像方法,对采集到的原图,进行裁剪和预处理。图4显示了实验中采集到的一张原图,图5显示了裁剪和预处理后后的图片,在主观评价实验中以裁剪和预处理后的图片作为待观测目标。
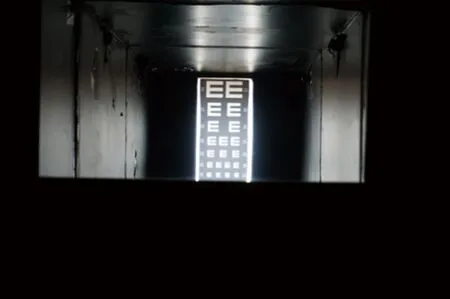
图4 无雾原图Fig.4 Original image without fog
图5 裁剪和预处理后图像Fig.5 Cropped and preprocessed image
1.3 主观评价实验
1.3.1 主观实验环境
主观识别恒常性理论包括:a)知觉恒常性;b)大小恒常性;c)形状恒常性;d)方向恒常性;e)亮度恒常性。因为有恒常性理论,使得主观识别有了客观性质。人们在不同照明条件下,存在亮度恒常性,因此虽然物体反射光线的绝对量发生了改变,但反射光线的百分比基本恒定。所以在选择背景亮度时,实现清楚观察即可。本文选择的电脑显示器亮度为300~350 cd/m2,MacBook笔记本电脑显示器共有16格调节屏幕亮度的单位,经过实验对比,当亮度处在第九格时,屏幕亮度达到可观察的清楚状态。根据ITU-R BT500-13标准,选择暗室作为实验环境,运用电脑显示器对准备好的图片进行放映,并要求被试在每一周期内对待评图像打分。每一组实验的主观测量,需要观察43组图片,这43组图片中每一组图片包括一张基准图片和一张有雾图片,在主观识别过程中,以随机顺序进行放映。每一周期对有雾图片进行主观评价,然后打分,记录数据。图6显示了主观评价的装置原理图,被试坐在实验平台前观察显示屏上展示的图片,并按照流程进行评级打分。整个评价过程都在暗室中进行,被试距离显示屏的距离为60 cm。
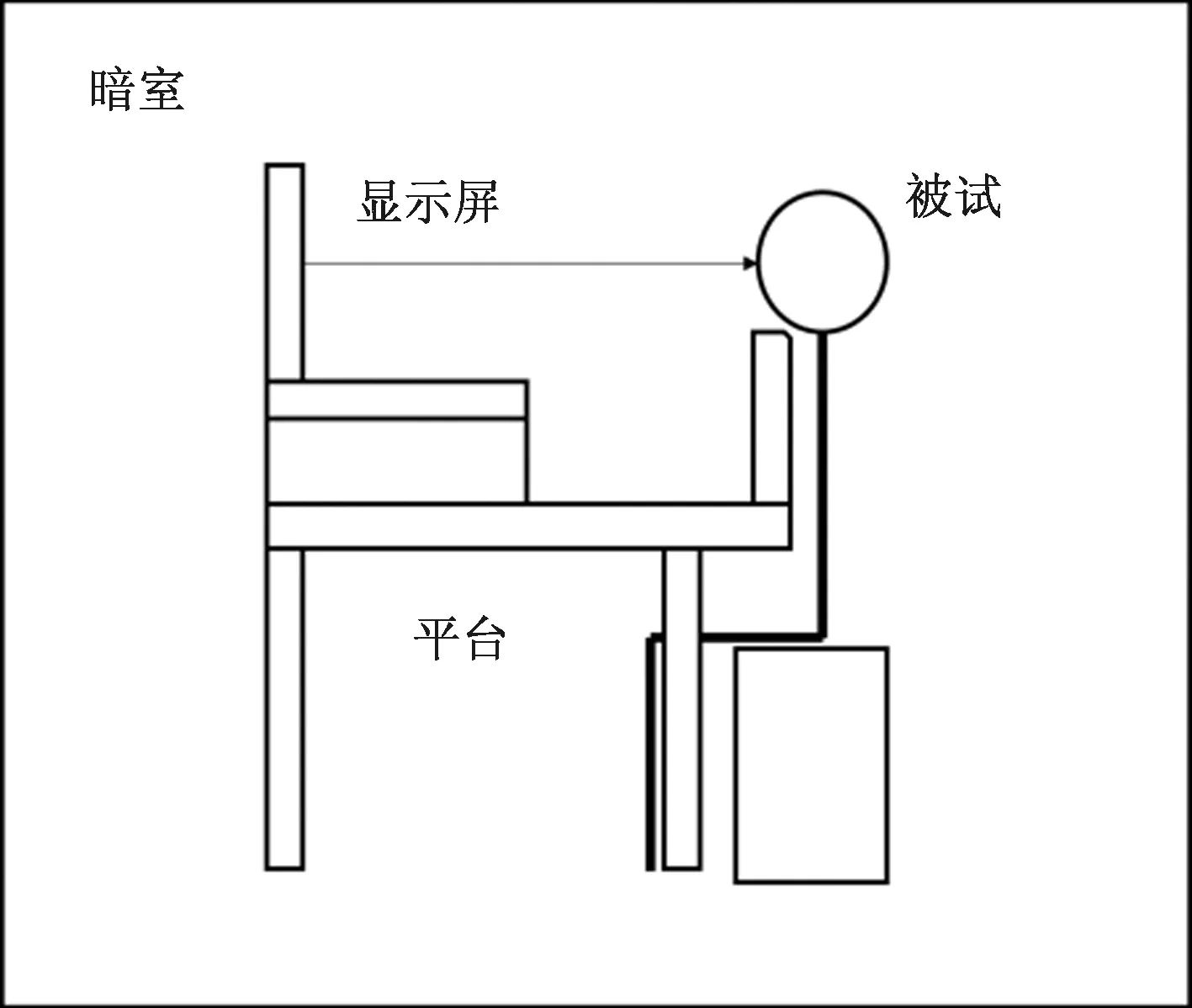
图6 主观评价装置侧视图Fig.6 Side view of subjective evaluation device
1.3.2 主观评价方法
主观质量评价是凭感知者主观感受来评价被测试图像的质量,通常采用双激励连续质量量表法,即观测者根据主观感知给出打分值[9]。双激励法是一种交替方法,评价者首先看到无损伤的基准图像,然后又看到受损伤的同一图像,然后评价者根据第一幅图像来评价第二幅图像,并且将评价描述根据分级量表转化为主观评级等级。分级量表如表1所示,它显示了主观评级和相对应的评级描述,被试可根据评级描述对图像按照主观评级等级打分。
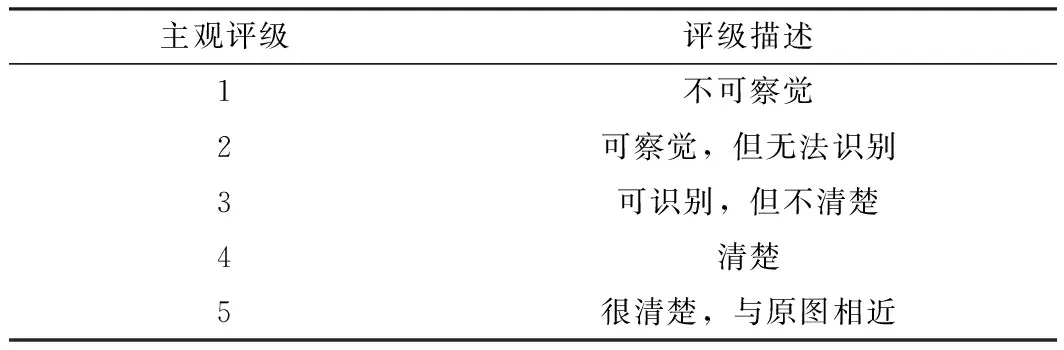
表1 主观评价分级
在每一个测试阶段开始时,我们向被试解释评价类型、分级量表、顺序及定时。在每次播放图片后,每位被试按照要求在一个周期内完成相应步骤,进行主观评级,每次所展示出来的待测目标图像都是随机选择播放的图片。图7显示了实验的一个周期内屏幕上所出现的内容,在一个周期T内,屏幕将展示不同的内容。T1时间为基准图像,T2时间为中度灰场,T3时间为待评价的雾图像,T4时间为中度灰场。要求观察者在T1和T3的整个持续时间内观看图像,并且只允许在T4期间内评分。一个周期结束后,开始下一周期,对下一张图片进行评价实验。每一组实验要进行43张图像的评价。经过多次实验,我们发现,将T1和T3延长至10 s以上不会提高评价者确定图像或序列的等级的能力。
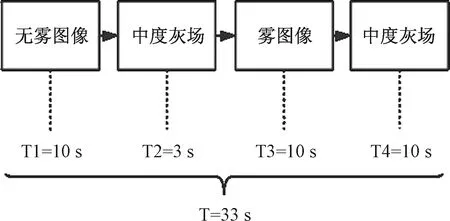
图7 主观测试周期Fig.7 Subjective test cycle
2 实验数据与分析
2.1 雾浓度的自然衰减属性
在每一次实验中,当实验箱雾达到饱和状态后,停止充雾,然后开始采集自然衰减情况下的雾浓度,经过多次雾浓度的采集,均得到类似雾浓度衰减曲线,如图8所示,经过数据的统计分析可以看出,可以用负指数曲线较好地拟合雾浓度在自然环境下的衰减曲线,如图9所示。
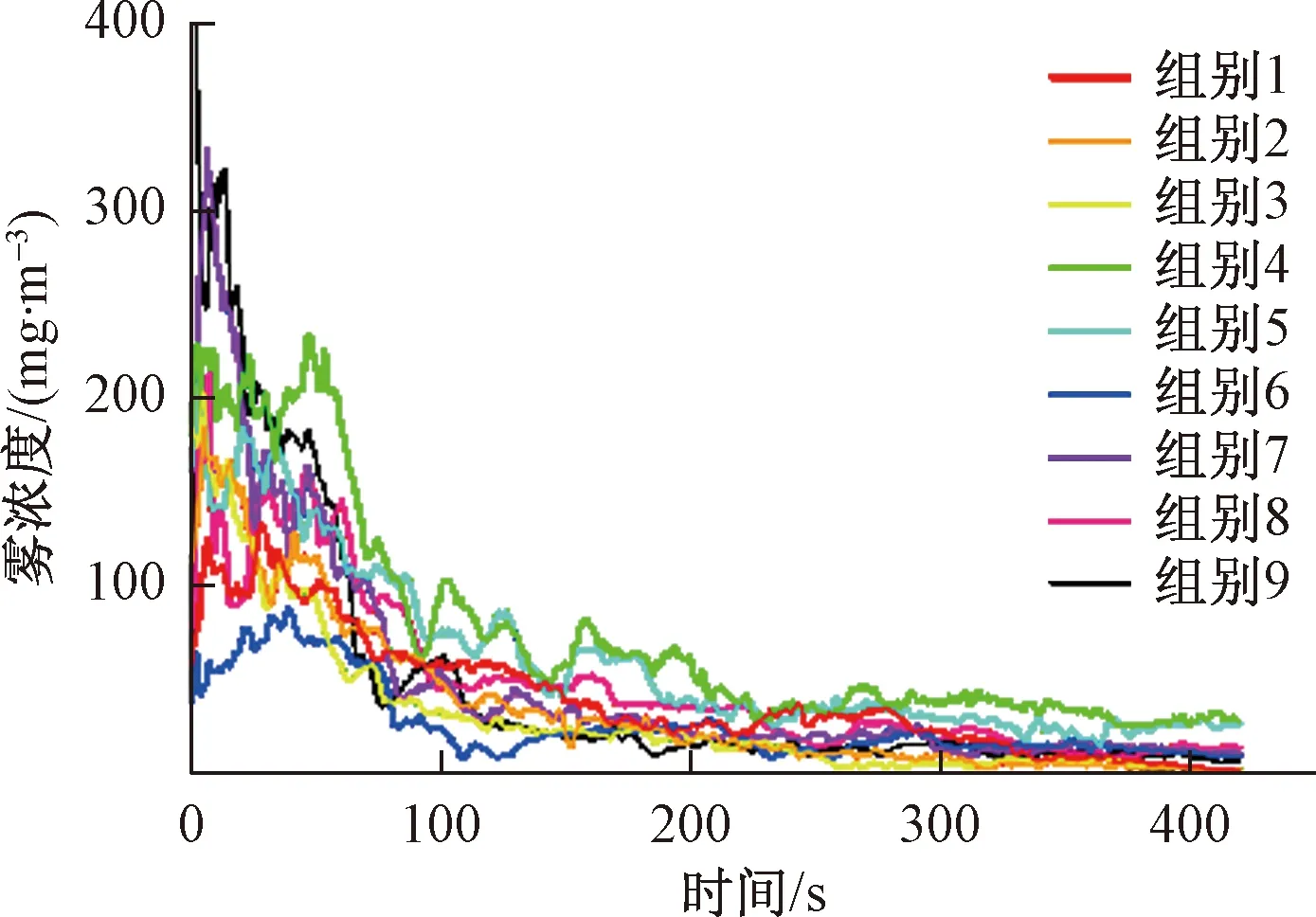
图8 雾浓度自然衰减曲线Fig.8 Natural decay curve of fog density
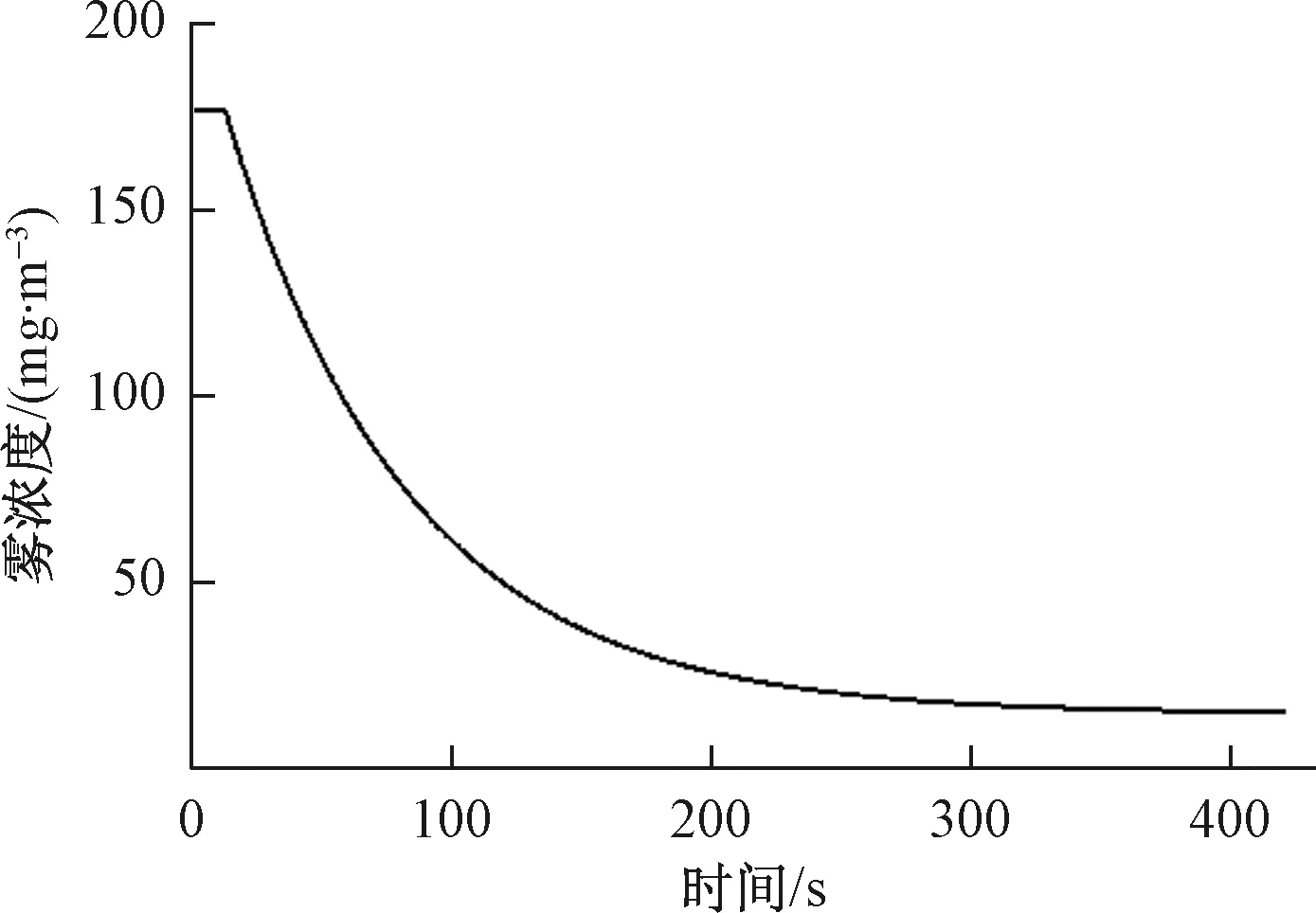
图9 雾浓度衰减拟合曲线Fig.9 Fog density decay fitting curve
2.2 图像特征数据
本文将采集到的原始图像,用Photoshop批量裁剪后,得到原图,然后用MATLAB软件对每一组图像进行处理,求取每一组图像(43张图片)的标准偏差。依照上述步骤,得到9组图像数据如图10所示。
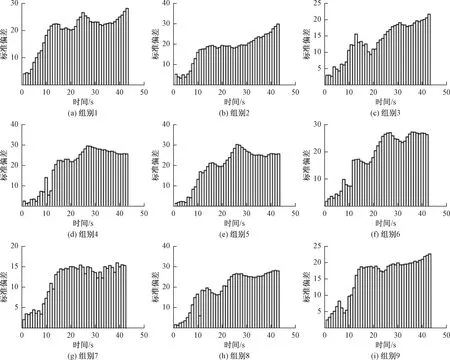
图10 图像标准偏差Fig.10 Image standard deviation
在采集图像时,每隔10 s采集一次,共采集了43张图片,每一组数据为测量周期7 min的图像数据。由图10分析可得,标准偏差随着时间都出现了快速爬升的阶段,当标准偏差达到20左右,会到达第一个峰值,然后会出现短暂下降,接着会缓慢爬升,最后标准偏差值逐渐平稳。
2.3 主观评价数据
本文邀请了7位被试对9组图片进行主观评级打分,将采集到的主观评价数据,归类分组整理后,运用Prism8软件对图像数据和主观评价数据进行分析和处理,得到数据如图11所示。
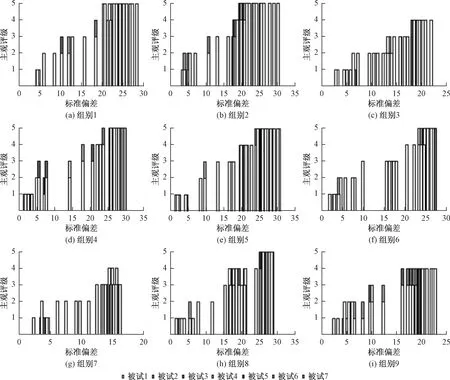
图11 主观评级打分数据Fig.11 Subjective rating scoring data
由图11可知:在标准偏差小于5时,被试多做出1的评价;在标准偏差在5~10之间,被试多作出2的评价;在标准偏差在10~20之间,被试多作出3的评价;在标准偏差在20~25之间,被试多做出3或4的评价;在标准偏差大于25时,被试多做出5的评价。这表明了雾浓度在高于120 mg/m3时无法察觉任何信息,低于20 mg/m3时可以清楚识别目标信息。
3 结论
本文研究了模拟雾环境下目标图像特征与人的主观评价之间的关系,得到了以下结论:
1)水雾浓度在自然环境下的衰减,可以用负指数曲线拟合分析;
2)标准偏差在雾消散过程中会出现快速爬升,在标准偏差值在20左右时到达第一个波峰,然后短暂回落,最后缓慢爬升,趋于平稳;
3)标准偏差初始阶段的快速爬升与雾浓度初始阶段的快速下降,这两种现象在原理上可实现匹配;
4)在标准偏差小于5时,人的主观无法察觉图片信息;在标准偏差接近10时,人的主观可以察觉到图片信息;在标准偏差大于20时,人的主观可以清楚辨别图片信息;
5)标准偏差最大可接近30,无法在测量时间7 min内达到无雾状态,说明在封闭环境内雾的消散时间较长,轻微的雾将保持较长时间。
本文选取了视力表作为观察目标,在之后的实验中,将选取具体的交通标示作为观测目标进行分析,为建立人的主观评价和雾浓度之间的具体定量关系,提供更好的数据基础。
