基于点云数据的园林信息普查应用研究
2021-08-14王朝辉李广伟郭震冬
王朝辉 李广伟 郭震冬
(江苏省测绘工程院,江苏南京 210013)
城市园林是城市中重要的自然生态资源,在改善城市环境质量、美化城市景观方面具有不可替代的作用。城市园林分布与数量是衡量区域自然生态环境是否宜居的重要指标,我国已将园林绿化作为重要指标纳入“国家智慧城市试点”工作考核指标体系中。通过园林绿化数据调查,为城市绿地系统规划与绿地管理工作提供科学依据,有助于城市发展规划的决策和城市的可持续发展。近几年,江阴围绕建设“绿色江阴”、打造生态家园的目标,积极推进绿化造林工作,为了准确掌握江阴建成区范围内绿地生态、古树名木等动态信息,达到精细化管理水平,构建了园林绿化管理系统,该系统借助GIS技术、激光点云技术,提取园林专题数据,为园林局等相关部门提供管理辅助决策工具。
激光点云数据一般采用车载移动测量车或背包SLAM技术获取,车载移动测量系统可以快速地获取沿道路的地物数据[1-3]。背包设备可以进入园林内部进行精细采集,两者结合确保了获取完整的测区点云数据。
1 技术路线
使用车载移动测量系统采集沿道路的树木等信息、使用背包SLAM设备进入公园内部数据采集,两者数据采用统一坐标系。
道路矢量数据的加入可以进一步缩小数据处理范围,通过道路矢量判断无效区域,在数据处理后及绿化数据提取时减少数据处理的工作量,提高数据处理效率。胸径定义为距离地面1.3 m高处的树木直径大小,经实地测量发现,灌木树在距离地面1.2~1.4 m之间,直径尺寸变化在容许误差范围内,采用统计圆柱体直径的方式计算树木的胸径尺寸。
内业数据信息提取采用半自动化的方式,即先自动化提取,再人工目视检查并直接在点云数据上采用人工测量的方式进行数据补充测量。获取的点云数据如果存在遮挡,需要外业人员实地进行补测完善。
技术流程如图1所示。
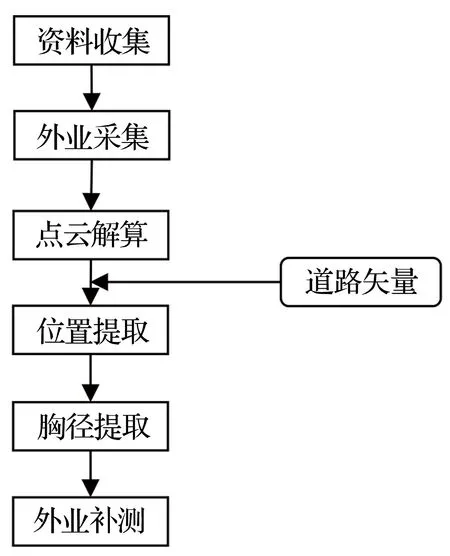
图1 技术流程
1.1 外业采集
外业采集设备三维激光扫描仪的安装工位角度与水平面呈约45°夹角。假设在道路起伏处于平缓的情况下,扫描线间不存在重复叠加,获取的树干单条扫描线数据始终小于树木周长的50%,扫描线也是与水平面呈约45°夹角。
外业采集时,为了采集尽可能多的树干数据,设定道路采集时行车速度为30 km/h以下;基于背包SLAM的公园数据采集因本身移动速度较慢,不需要额外限制采集速度。
因为作业道路涉及城区范围,根据道路拥堵时间分布情况,制定了夜晚对拥堵道路进行数据采集的方案,减少了外业作业时间和采集到的数据量。公园部分使用背包SLAM设备进行采集,可以反复多次在园林内部穿插采集,无须沿道路采集,采用最有效的路线进行作业。
1.2 自动提取
数据内业解算使用自架站GPS基站数据进行差分处理,坐标系统一为CGCS2000,经处理后得到的三维点云数据即绝对坐标值。
数据提取采用自动化的方式进行提取[4],人工干预修编,采用投影分割等方式进行分类提取,去除原始数据的地面干扰数据,提取树木位置信息,根据分类后的树木点云数据提取其胸径、高度等信息。
位置信息提取是自动提取的第一步操作,从杂乱无章的点云数据中提取出所有树木的位置信息,根据每个位置对应的树木点云数据计算胸高、树高等信息。
胸径的自动提取使用计算相互交叉重叠的固定高度的圆筒点云直径的平均值作为胸径。
胸径圆筒分割如图2所示。
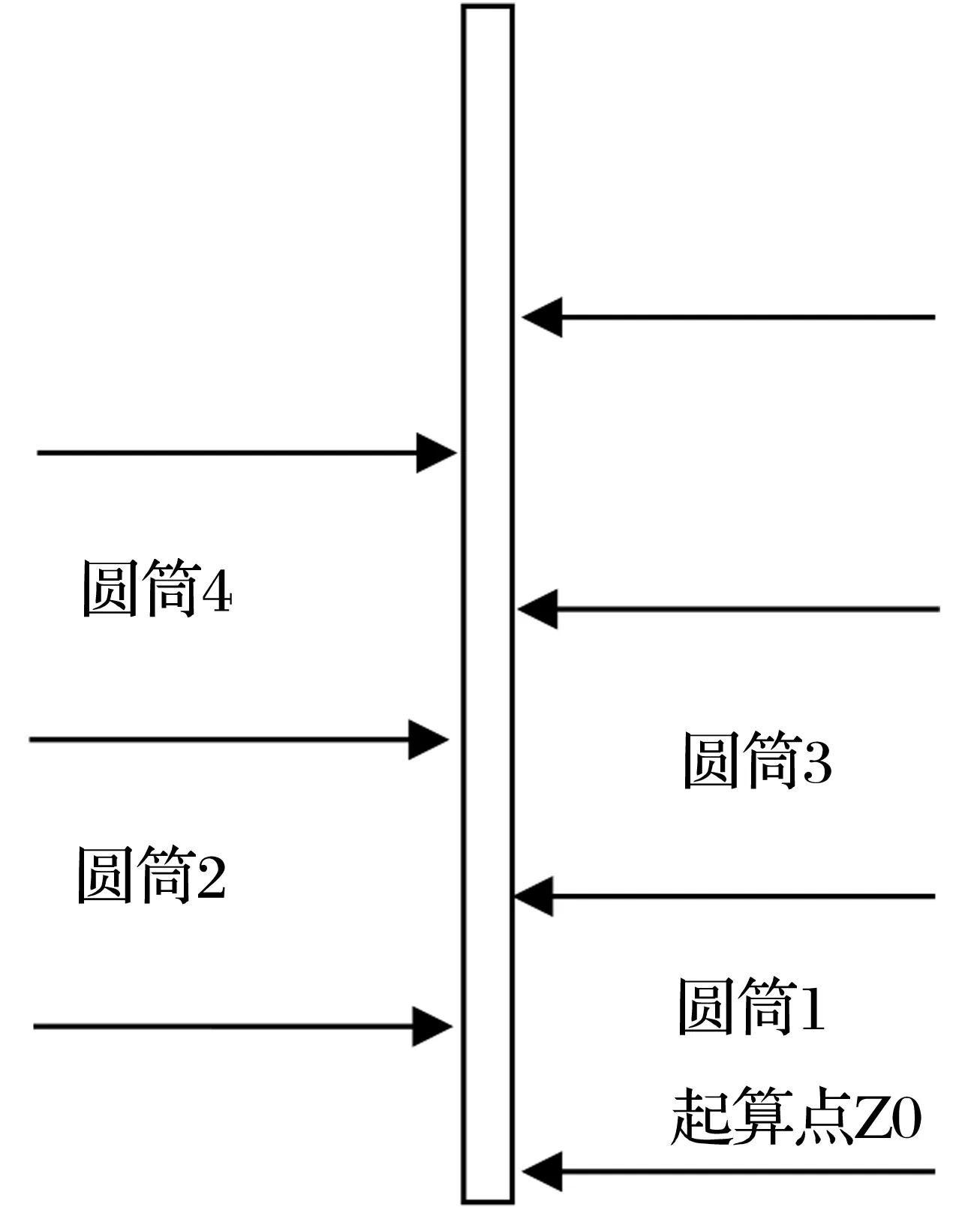
图2 胸径圆筒分割示意图
2 应用试验
2.1 测区介绍
试验测区位于江阴市大桥公园内,该公园树木较大且分布较广,南北方向跨度达4 km,公园内地势整体平坦,部分绿化树木较集中,内部通行情况较差,非常适合采用背包式设备进行数据采集。
公园内部及四周均有道路通行,车载移动测量设置可以沿道路进行数据采集,可以快速获取公园整体的高精度三维点云数据,并且可以通过反复往返扫描提高点云密度,整体公园可以通过车载移动测量设备和背包式测量设备进行数据外业的数据获取。
2.2 数据采集
试验使用的设备如图3所示。

图3 使用的设备
以江阴某园林绿化项目为依托,进行实际生产试验,使用移动测量采集可以通行的外围及内部道路,使背包采集内部无法通行的内部区域,获取测区内园林的激光点云数据。数据解算采用CGCS2000坐标系,背包SLAM数据使用同名点计算转换至CGCS2000系。共计采集3 km2的园林数据,外业采集及内业数据处理共计投入2人,外业采集耗时3 d。
数据效果如图4所示。
图4 采集的点云数据
2.3 数据处理
内业数据处理解算及树木等的信息提取耗时10 d时间,要素信息提取采用自动化的方式进行提取,自动化提取前需要去除地面点云数据,以便减少提取过程中计算量,提高自动化提取的效率。地面点云数据作为树木底部的起算点,计算其上1.3 m高处的树木胸径,部分树木树干较细且密度较大的地方存在提取遗漏问题。针对遗漏部分采用人工目视检查的方式进行检查,对自动提取中遗漏的进行人工补测,通过人工的方式从点云数据中量取树木的坐标位置及胸径尺寸等信息。
将提取的数据入库,精度检测使用实地测量的方式获取树木的测量信息作为真值,树干平均点位误差为±0.27 m,胸径中误差为±0.04 m。由检测结果可知,此次基于点云数生产的园林普查数据满足设计的精度要求。
3 结语
点云数据在园林绿化普查项目中起到了重要作用,保证了生产的外业安全性和数据的完整准确性。根据项目试验结果分析,使用点云数据进行园林绿化普查可以大幅度提高获取树木点位及胸径、树高、树冠等信息的效率,节省外业普查时间,特别是在树高、树冠信息的获取优势较大。采用人工外业实地采集,耗费时间和精力,且无法保证人员的安全性,通过点云数据还可以判断树木等的长势情况,通过不同年份的点云叠加对比分析还可以判断生长情况。文章为激光点云在类似项目中的推广应用提供了参考,后续研究中还应考虑增加树种的自动识别功能。
