煤矿掘进工作面智能化改造方案探讨
2021-08-10王立强
王 飞,谢 进,罗 伟,王立强
(国能神东煤炭集团有限责任公司大柳塔煤矿,陕西 神木 719315)
0 引言
掘进工作面的生产是由连续掘进机和锚杆钻机交替进行掘进和支护作业。作业循环进度根据井下现场地质条件确定,一般不大于11 m(连掘机机身长度)。连续掘进机割煤,运煤车(梭车)接煤后运往给料破碎机,给料破碎机将煤块破碎均匀转运至胶带输送机,胶带输送机将煤送往地面煤仓,洗选加工中心将煤仓的煤洗选加工使其煤质达到预期指标,然后装车运出销售。
连续掘进机掘进过程分为“切槽”和“采垛”2个工序,连掘机司机按照地质测绘指向与施工要求,确定连续掘进机的进刀位置,先在巷道的一侧掘进,按照巷道设计尺寸截割煤层,当长度达到循环进度后退机,这一工序称“切槽”工序[1-3]。然后连续掘进机退出,调整到巷道的另一侧,再切割剩余的煤壁,使巷道掘至所要求的宽度和循环进度,这一工序称为“采垛”工序。连续掘进机一次“切槽”和“采垛”工序完成则为一个掘进循环,之后连续掘进机退出,由锚杆钻机进入空顶区域支护。
1 掘进工作面自动化发展现状与改进方向
1.1 掘进工作面自动化发展现状
目前,全国大部分矿井都在提高矿井自动化水平,但是掘进工作面自动化水平仍然比较低下。其主要原因是掘进工作面涉及的点多面广,搬家倒面比较频繁,设备布置较为分散,实现自动化控制比较困难。
随着掘进工作面向前推进,胶带输送机数量逐步增加,必须给每部胶带机配备胶带机司机,负责胶带机的启停和巡视;当掘进工作面推进至1 km以上时,局部通风机及配电硐室与工作面距离越来越远,就必须配备专人看守局部通风机和配电硐室,负责对局部通风机监控与切换,对配电设备日常检修与试验。所以,当前多数煤矿企业通过对胶带输送机、局部通风机以及配电设备进行自动化改造,实现远程集中监控,以此来达到减员增效的目的[4-6]。
掘进工作面在生产时,连续掘进机开拓巷道,掘出的煤通过梭车运输至给料破碎机,给料破碎机破碎加工后卸料至胶带输送机,胶带输送机将煤运到地面。目前,煤矿企业在连续掘进机的远程化控制,梭车的无人自动驾驶,给料破碎机与梭车的联动启停方面尚没有突破性进展,仍采用传统的人工操作。
1.2 掘进工作面自动化改进方向
现代化矿井在保障安全、提高效率、降低成本方面主要依靠减员增效的手段,掘进工作面的自动化改进方向也主要集中于此[7-9]。首先,将掘进工作面的输送胶带机、局部通风机、配电设备乃至排水设备等全部实现集中监控,将此类低技能型岗位工全部由计算机、摄像头、传感器等感知设备代替,从而达到减员增效的目的。其次,通过对给料破碎机与梭车进行自动化改造,使给料破碎机与梭车之间、梭车与连续掘进机之间实现联动,使梭车实现无人驾驶,从而达到减员节能的目的。最后,对连续掘进机进行自动化改造,使连掘机具备自主导航、自动掘进的能力,通过连掘机司机的远程干预,使连掘机可以在复杂的地质条件下完成巷道开拓,从而使连掘机司机远离恶劣的工作环境,提升安全生产能力[10]。
2 掘进工作面自动化改造方案
2.1 连续掘进机自动化改造
2.1.1 连掘机导航
激光驾束制导是将激光接收器置于被导航设备上,激光对准目标照射,设备在激光波束内行走。由于激光束方向性好散角小,制导精度极高,所以连掘机使用激光制导产生的误差很小,满足连掘机生产截割工程质量的要求。在连掘机“切槽”和“采垛”进刀位置分别安装激光发射器,在连掘机上安装激光导航装置,连掘机司机使用手动控制模式将连掘机调至“切槽”或“采垛”进刀位置,然后连掘机在导航自动模式下开始记忆割煤。当前煤矿连掘机普遍采用变频器驱动行走牵引电机,所以将激光制导监测到的连掘机偏移量转变为调频信号,采用PID控制技术可以很好地完成机身纠偏调整。在连掘机机身安装双轴水平倾角传感器,监测连掘机机身前后与左右2个方向的水平倾斜角度,连掘机控制计算机实时比对机身水平倾斜量以及激光导航偏移量,当倾斜量或偏移量超过限定值则认定连掘机超偏,控制计算机立即停止连掘机移动,等待连掘机司机人工干预排查。
2.1.2 连掘机记忆割煤
记忆割煤是目前煤矿自动化生产改进过程常用的一种方式。由于煤矿井下地质条件复杂,传感器灵敏度无法满足设备完全自动化生产的条件,所以人工干预下的记忆割煤成为减员增效的一种特殊手段。如图1所示,根据连掘机生产工艺将自动化记忆割煤模式下的巷道掘进分为5个工步。第1步,根据巷道设计高度设定连掘机起截割头参数,截割头升至设定高度;第2步,根据地质条件设定进刀距离参数,连掘机进刀;第3步,设定连掘机截割头下降高度参数,连掘机降截割头割煤;第4步,设定连掘机进刀拉底距离参数(一般为工步2进刀参数的1/2),连掘机进刀拉底;第5步,退机,退机距离为工步4的参数。从工步1至工步5连续循环掘进,巷道开拓的地质条件决定连掘机的最远无支护掘进距离,该距离除以工步2的参数为一次记忆割煤循环数,当连掘机掘进循环数达到该设定值,则连掘机自动停机,等待人工干预。
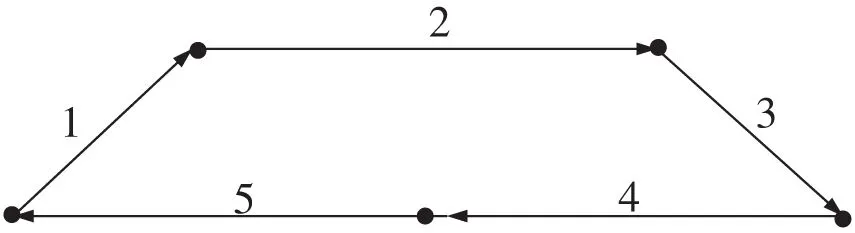
1-起截割头;2-连掘机进刀;3-降截割头割煤;4-进刀拉底;5-退机
连掘机在与梭车联动的记忆割煤模式下,各工步会受梭车的运煤过程影响而出现停止现象,所以程序设定在此种模式下连掘机会持续依次执行各工步,不受梭车运煤过程的开停机干扰,以此来保证连掘机记忆割煤的连续运行。
2.2 梭车无人驾驶改造
2.2.1 梭车自动行驶
基于预设磁轨迹的磁导航技术是自主导航领域中较为成熟的一种技术,也是短距离无轨设备导航运用较多的一种技术,可以完成自主导航设备的预定运行路线导航及定位,相对于光电导航与视觉色条导航,磁导航可靠性高,受限条件少,较激光导航系统简单、成本低廉。完整的磁导航感知系统由地标传感器、多点位磁导航传感器以及磁条(或通电缆线)组成,所以,在梭车运行路线的顶板架设磁条轨道与磁钉(架设方法类似单轨吊),梭车机身上方安装多点位磁导航传感器,通过感知不同点位捕获到的磁场强度判断梭车车身位置与磁轨道预设位置的偏移量,将偏移量转换为电信号,作为梭车转向调节的输入量;通过磁导航传感器感知到的磁钉极性(N极或S极)作为梭车保持直行或进入弯道等策略决定行进方向标志,使梭车按照预定路线行走。
定量阀是一种可以定时、定量注油的新型阀体,自动化程度高、性能稳定。将当前梭车的转向阀更换为定量阀,定量阀的导通改为电磁控制,将梭车转向的液压控制转变为电气控制。当梭车磁导航传感器监测到车体偏移预定磁条轨道,则由梭车控制主机计算出偏移量与纠偏量,并控制导通对应的定量阀,实现定量纠偏,使梭车回归预定行走轨迹。在进入弯道处则优先执行策略决定行进动作。
2.2.2 梭车自动接煤
在梭车前端安装限位磁铁,在连掘机的刮板运输机末端安装磁信号接收器,当梭车行走至连掘机后部,连掘机捕获到磁信号,此时开启连掘机的刮板运输机开始给梭车装煤;在梭车料斗上部安装料位传感器,当煤堆积触发传感器后则开启梭车的刮板运输机,待煤位下降后则停止梭车刮板运输机;在梭车刮板运输机卸料部安装料位传感器,当煤堆积触发该处传感器后,禁止刮板运输机启动,梭车启动行走开始退机;连掘机无法捕获到梭车前端磁信号后则关闭连掘机的刮板运输机,停止装煤。
2.2.3 梭车自动卸煤
在给料破碎机料斗内安装限位磁铁,在梭车刮板运输机尾部安装磁信号接收器,在梭车刮板运输机控制回路安装时间继电器,当梭车尾部进入破碎机料斗内捕获到磁信号后,梭车停止退机动作,启动刮板运输机,开始卸煤,根据梭车刮板运输机转速计算出卸煤时间,使时间继电器按照卸煤时间延时动作,停止刮板运输机并启动梭车,梭车前进。
2.3 人工干预
当前国内的自动化采掘工作面由于煤矿井下工作环境的特殊性仍然普遍采用人工干预,以此规避设备自动运行过程中存在的异常事件与紧急状况。在连掘机机身与梭车机身前后方向分别加装点阵红外线热成像摄像头和可见光摄像头,由于掘进工作面生产期间粉尘浓度较大,所以使用红外线热成像摄像头可以极大提高视频监控效果。连掘机司机处于掘进工作面生产区域以外,并配备手持式移动监控终端,该移动终端通过无线基站接收连掘机与梭车的数据。连掘机手动控制模式与导航自动模式的切换,可设定记忆割煤各工步参数、运行视频画面的监控,以及连掘机运行状态数据的监控;具备梭车自动驾驶模式与人工驾驶模式的切换,梭车运行视频画面的监控及运行参数、运行状态数据的设定等功能,可实现设备运行异常报警功能和紧急停车。
2.4 给料破碎机自动化改造
掘进工作面梭车运煤产生的煤流为非连续性煤流,且梭车运煤卸煤周期无法固定,如果给料破碎机的刮板运输机持续运行会导致电能的浪费和设备的磨损。将给料破碎机刮板驱动控制阀更换为电磁阀,使液压控制转变为电气控制,在给料破碎机料斗前部安装超声波探测器,当梭车与给料破碎机距离小于1 m时,接通电磁阀电路使其动作,开启给料破碎机的刮板运输机,当梭车远离给料破碎机1 m以上后,使电磁阀电路延时3 min切断,停止给料破碎机的刮板运输机,完成卸料破碎,最终使梭车与给料破碎机形成联动。
2.5 胶带输送机与供电系统集控改造
掘进工作面一部胶带机供电系统一般包括胶带机移变、馈电开关、磁力启动器、照明综保、胶带机通信控制保护器;掘进工作面生产供电系统一般包括生产移变(连掘机、梭车、锚杆机、给料破碎机供电)、排水移变(工作面排水系统供电)、主风机移变(局部主通风机供电)、备风机移变(局部备用通风机供电)、馈电开关、局部通风机双回路组合开关等。当前煤矿井下供配电设备普遍采用MODBUS/RS-485通信协议,用以实现设备的联网控制功能,理论最高传输速率可达10 Mbps,最大的通信距离约为1 219 m,传输速率与传输距离成反比,传输速率越低,传输距离越长,RS-485接口是采用平衡驱动器和差分接收器的组合,抗共模干扰能力增强,即抗噪声干扰性好。
在每部胶带机机头区域安设数据采集箱,数据采集箱具备串行服务器与以太网交换机,可以接入MODBUS通信协议设备与TCP/IP通信协议设备,采集胶带机供电设备数据后接入工业控制网络。在每部胶带机卸载部区域安装摄像头,摄像头通过以太网接入工业控制网络,使操作人员可以实时监控胶带机运行情况。在配电硐室内安装数据采集箱,数据采集箱具备串行服务器与以太网交换机,可接入MODBUS通信协议设备,用以采集生产移变、排水移变、主风机移变、备风机移变、馈电开关、风机组合开关等设备数据。在掘进工作面生产区域给料破碎机处安装集中控制计算机,将胶带机供电系统数据与配电硐室内供电系统数据通过交换机传至集中控制计算机,开发上位机集中控制组态画面与视频监控系统,实现胶带运输机与供电系统的集中控制。
2.6 掘进工作面网络架构
胶带机设备与配电硐室设备通过不同的通信协议接入数据采集箱,数据采集箱使用以太网(光缆或网线)接入交换机,连掘机与梭车的数据以无线网络(WIFI或AP)的方式接入交换机,集控计算机通过交换机与各台设备之间通信,整个掘进工作面形成局域网;交换机接入井下工业环网从而将掘进工作面数据传送至地面,供数据库储存和调度指挥中心监控,如图2所示。
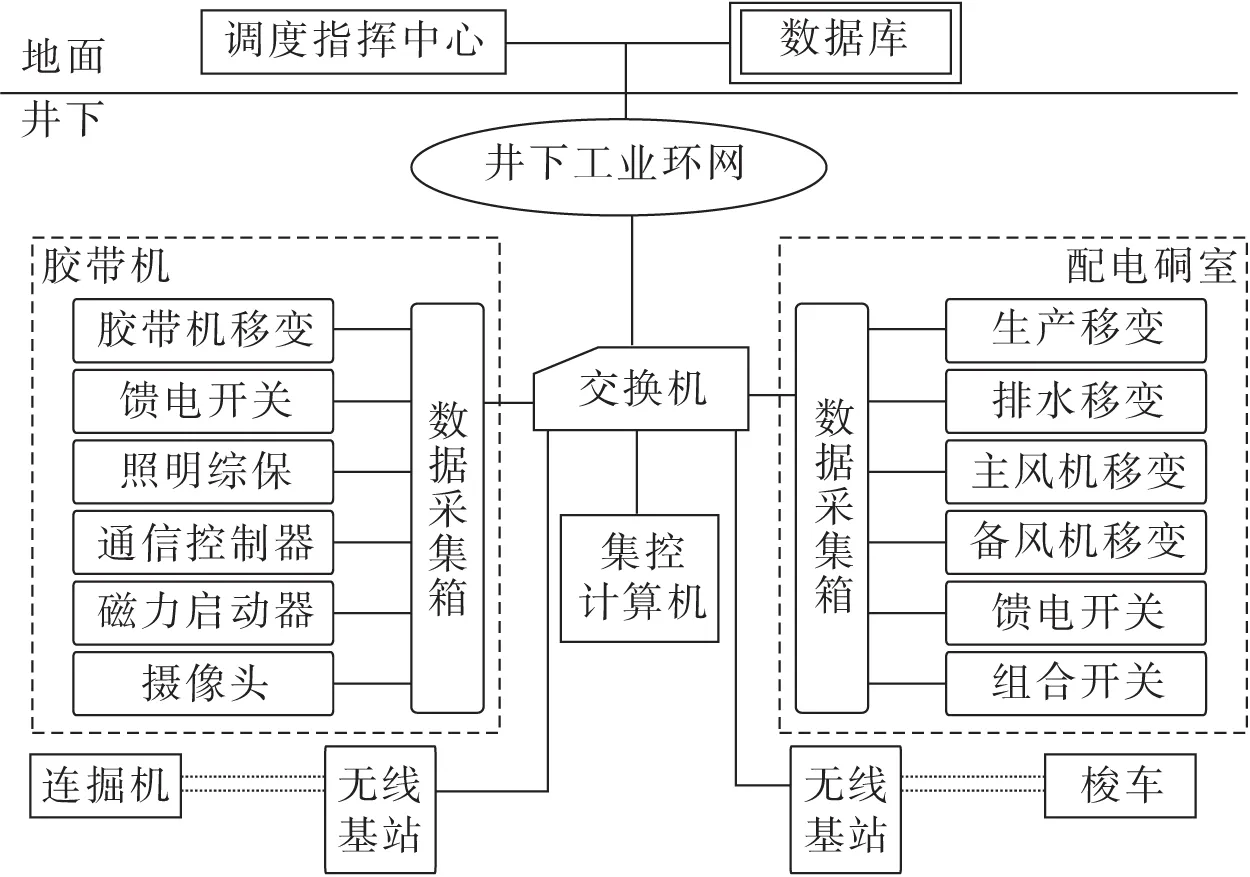
图2 掘进工作面网络拓扑图
3 结语
煤矿行业一直背负着“高危”“艰苦”“落后”等沉重的包袱,将矿井工作人员从艰苦危险的工作环境中解放出来,掘进工作面的自动化改造为这一理想提供了技术支持。未来连掘机司机可以身处地面调度指挥中心,通过VR视频监控技术身临其境地对井下掘进设备运行状态进行实时监控和远程遥控干预,调度指挥人员实时与连掘机司机面对面沟通,缩短生产指挥与生产执行之间的命令传达跨度,人工智能的不断深入应用最终会使煤矿井下实现无人化生产,从根本上实现零伤亡和零伤害。掘进工作面的自动化改造可以有效减少井下岗位操作人员,使采煤机司机、梭车司机等操作岗位工远离恶劣危险的生产环境,极大减少矿井生产中“人的不安全因素”。掘进工作面的集中控制运行,减少了巡视人员的长距离行走工作量,提升了工作效率。设备的联动运行,为矿井生产中的设备节能提供了技术支持,降低了设备损耗所产生的成本。未来煤矿企业必将在智慧矿山模式下运营生产,少人化乃至无人化的矿山生产模式会成为主流,掘进工作面的自动化改造将为此奠定基础,掘进工作面的自动化生产模式与管理机制可以为智慧矿山的运维保障培养储备专业技术人才,为智慧矿山的运营管理提供经验参考。
