铅铋快堆控制棒驱动机构研究
2021-08-09唐菊梅朱清靳峰雷瞿宇刘明
唐菊梅 朱清 靳峰雷 瞿宇 刘明


摘 要:随着人类对能源的需求不断增长,国际核工程界提出发展第四代核电系统的主张,铅铋快堆是第四代反应堆系统6种堆型之一。铅铋快堆的停堆机构采用齿轮齿条式控制棒驱动机构,该机构主要功能为抓取和释放控制棒、升降与悬停控制棒及快速落棒。该文经过分析与初步试验,所设计的铅铋快堆控制棒驱动机构符合设计指标要求,并通过设计防反弹装置,达到了防止倾翻事故工况要求。
关键词:铅铋快堆 齿轮齿条 控制棒驱动机构 反应堆
中图分类号:TL4 文献标识码:A文章编号:1672-3791(2021)04(b)-0076-04
Research for Control Rod Drive Mechanism of Lead Bismuth Fast Reactor
TANG Jumei1 ZHU Qing1 JIN Fenglei2 QU Yu1 LIU Ming1
(1.Sichuan Huadu Nuclear Equipment Manufacture Co.,Ltd., chengdu, Sichuan Province, 611830 China; 2.China Institute of Atomic Energy, Beijing, 102413 China)
Abstract: With the increasing demand for energy, the international nuclear engineering community proposes to develop the fourth generation nuclear power system. Lead bismuth fast reactor is one of the six types of the fourth generation reactor system. Rack and gear control rod drive mechanism is used in the shutdown mechanism of lead bismuth fast reactor. The main functions of the shutdown mechanism are grabbing and releasing control rod, lifting, descending and holding control rod, dropping rod quickly. After analysis and preliminary tests, the designed lead-bismuth fast reactor control rod drive mechanism meets the design index requirements, and through the design of an anti-rebound device, the requirements for preventing tipping accidents are achieved.
Key Words: Lead bismuth fast reactor; Rack and gear; Control rod drive mechanism; Reactor
随着人类对清洁能源需求的增长,核能作为一种清洁、安全、高效的能源,已在能源领域中起到了重要作用。
铅基材料(铅或铅合金)作为反应堆冷却剂,其优点是:(1)铅基堆中子经济性优良,发展可持续性好;(2)铅基堆热工特性优良,化学惰性强,安全性好;(3)铅基材料可与易挥发放射性核素碘和铯形成化合物,可以降低反应堆放射性源项。
1 铅基快堆研究现状
1.1 俄罗斯
俄罗斯从20世纪60年代开始研究铅冷快堆,并优先应用于核潜艇的核动力装置,后逐渐转为民用。现比较成熟的堆型为SVER与BREST系列。
1.2 欧洲
2006年,欧洲正式启动铅冷快堆ELSY的研究,经过多年努力,最新设计ELSY-600是一个已经具有经济竞争力、安全可靠性的初步堆型。
1.3 美国
在20世纪90年代末,美国国内多家大学合作进行了铅冷快堆的研究。研究重点集中在高温制氢、嬗变处理核废料、铅铋腐蚀性等。
1.4 中国
经过多年的发展,中国也成为从事铅冷快堆研究的大国之一,在2011年,针对加速器驅动次临界系统预研装置和第四代铅冷快堆的技术发展目标和实验要求,完成了具有临界和加速器驱动次临界双模式任务[1]。
2 铅铋快堆控制棒驱动机构研究
控制棒驱动机构是反应堆控制系统和安全保护系统的执行机构,具有按照反应堆控制系统和安全保护系统的指令驱动控制棒组件从堆芯提升、保持在某一位置上、从任意工作位置上插入或快速插入堆芯,完成反应堆启动、调节功率、维持功率、反应性补偿、正常停堆和紧急工况下快速停堆的功能[2-3]。
铅冷快堆为第四代核能系统液态金属冷却堆型,在控制棒驱动机构结构型式上,铅铋快堆采用技术成熟度较高的齿轮齿条式控制棒驱动机构。
2.1 设计研究主要目标参数
(1)控制棒运行速度:0~8 mm/s。
(2)控制棒运行精度:±3 mm。
(3)控制棒最大行程:650 mm。
(4)控制棒组件设计温度:510 ℃。
(5)驱动机构工作介质:惰性保护气体,铅铋合金。
(6)控制棒运行环境介质:铅铋合金。
(7)控制棒全程落棒时间:0.6 s。
(8)控制棒重量:55.54 kg(移动体23.76 kg)。
(9)相邻两根控制棒中心距: 200 mm。
(10)驱动机构设计寿命:15年。
2.2 驱动机构结构描述
铅铋快堆控制棒驱动机构属于机电一体化设备。其组成分别是组合电机、主轴传动链、抓手传动链、主轴终端开关、抓手位置开关、快速释放装置、防反弹装置、落棒加速装置、落棒缓冲装置、棒位连续位置检测装置、可动体和抓手部件。机构全长5 214 mm(不包括控制棒长度),最大直径φ198 mm。
铅铋快堆控制棒驱动机构结构示意图见图1,传动原理图见图2。
主轴传动链:采用组合电机提供驱动力,通过减速装置,将电机的旋转运动转化为主轴齿条的直线运动,实现控制棒的升、降及保持。
抓手传动链:采用组合电机提供驱动力,通过减速装置,将扭矩传递给下部凸轮,驱使抓手开、合,实现对控制棒的抓、放。
驱动机构升降动作:主轴驱动电机旋转→蜗杆ZZ1旋转→蜗轮ZZ1旋转→齿轮ZZ1旋转→齿轮ZZ2旋转→传动轴旋转→齿轮ZZ3旋转→齿轮ZZ4旋转→齿轮ZZ5旋转→齿轮ZZ6旋转→齿轮ZZ7旋转→齿轮ZZ8旋转→齿轮ZZ9旋转→可动体上下运动→抓手上下运动(→控制棒组件上下运动)。
连续位置检测动作:齿轮ZZ9旋转→齿轮WZ1旋转→齿轮WZ2旋转→齿轮WZ3旋转→齿轮WZ4旋转→连续位置检测装置旋转实现连续位置检测。
驱动机构抓手开合动作:抓手驱动电机旋转→齿轮ZS1旋转→齿轮ZS2旋转→蜗杆ZS1旋转→蜗轮ZS1旋转→齿轮ZS3旋转→齿轮ZS4旋转→旋转套筒旋转→可动体旋转轴旋转→抓手部件凸轮旋转→抓手开、合。
驱动机构落棒动作:快速释放装置断开传动链→落棒体(含可动体、抓手部件和控制棒组件)下落→齿轮ZZ9旋转→齿轮ZZ8旋转→齿轮ZZ7旋转→齿轮ZZ6旋转→防反弹装置正向旋转并打滑。
落棒防反弹动作:落棒体落棒后具有向上运动趋势会带动齿轮ZZ9旋转→齿轮ZZ8旋转→齿轮ZZ7旋转→齿轮ZZ6旋转→防反弹装置接通主轴传动链,将扭矩传递到主轴传动链上半段,利用蜗轮蜗杆的自锁功能防止传动链旋转,利用传动链的柔性吸收能量从而实现防反弹功能,同时能够实现驱动机构在倾斜摆动状态的自锁功能。
2.3 驱动机构功能描述
控制棒驱动机构主要包括3个功能:抓取和释放控制棒、升降与悬停控制棒、快速落棒。
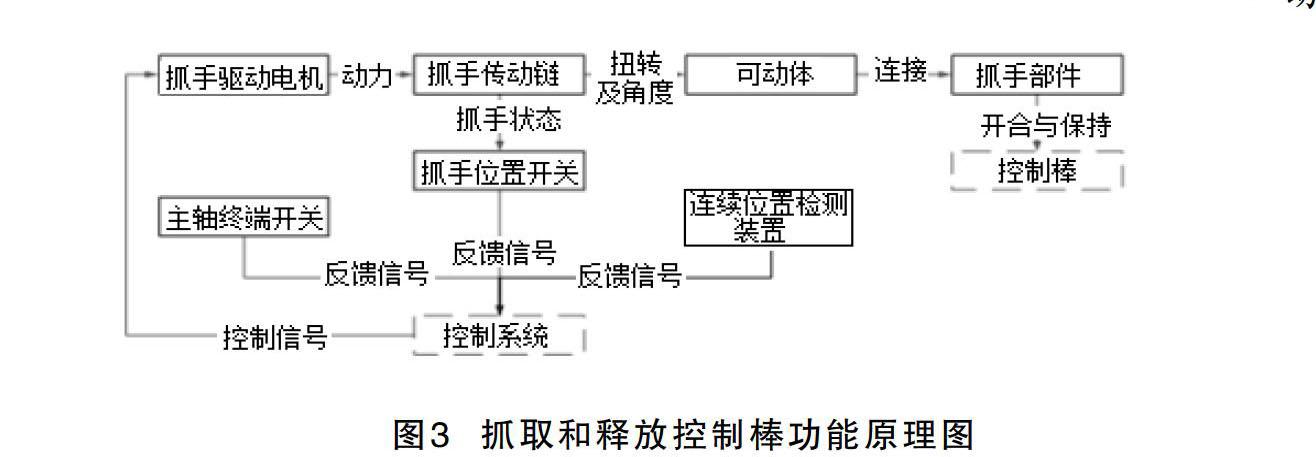
2.3.1 抓取和释放控制棒
功能描述:控制棒驱动机构抓手的传动链在电机的驱动下,控制棒驱动机构抓手能够抓取和释放控制棒,且设置有抓手位置开关,能够显示出抓手的开、合状态。同时,为了保证抓取和释放的可靠,控制棒的抓取和释放装置要具有防止控制棒意外跌落等功能[4]。
实施方式:由抓手驱动电机、抓手传动链、可动体、抓手部件、抓手位置开关、主轴终端开关和连续位置检测装置相互作用,共同实现。其功能原理图见图3。
2.3.2 升降与悬停控制棒
功能描述:驱动机构在电机的驱动下,通过减速传动链,将电机的旋转运动转化为齿条的直线运动,实现控制棒的升、降及保持功能。当驱动机构提升到“上限位”时,电机断电,依靠减速装置中的自锁式蜗轮蜗杆副实现悬停控制棒。
实施方式:升降与悬停控制棒功能由主轴驱动电机、主轴传动链、快速释放装置、抓手部件、可动体、主轴终端开关、抓手位置开关和连续位置检测装置相互作用,共同实现。其功能原理图见图4。
2.3.3 快速落棒
功能描述:快速落棒,电磁离合器失电断开传动链,控制棒在可动体的带动下快速插入堆芯,从而使反应堆紧急停堆。
实施方式:快速落棒功能由主轴传动链、快速释放装置、加速装置、缓冲装置、防反弹装置、抓手部件、可动体和连续位置检测装置相互作用,共同实现[5-6]。可动体上设置加速装置和缓冲装置,采用圆柱螺旋弹簧。其功能原理图见图5。
3 结语
经过分析与初步试验,所设计的铅铋快堆控制棒驱动机构符合设计指标要求。在控制棒驱动机构行程空间受限即小型化设计上,实现了铅铋快堆控制棒驱动机构设计总长度在5.5 m以内,同时,通过设计防反弹装置,实现了防止倾翻事故工況要求。
参考文献
[1] 韩金盛,刘滨,李文强.铅冷快堆研究概述[J].核科学与技术,2018,6(3):87-97.
[2] 郑志兴.核电站反应堆控制保护系统的设计与研究[D].华南理工大学,2019.
[3] 石康丽.铅冷快堆始发事件及瞬态安全特性初步研究[D].中国科学技术大学,2017.
[4] 张旻,李书良,阳雷.核反应堆控制棒涡流检测仿真[J].无损检测,2019,41(7):1-4.
[5] 曾梅花.加速器驱动铅基堆堆内换料系统结构分析与仿真[D].中国科学技术大学,2018.
[6] 陶舒畅,赖建永,秦婧,等.美国铅冷快堆研究进展[J].科技视界,2020(17):231-234.
