有缆遥控水下机器人在水利水电工程领域的应用现状与发展前景
2021-08-09林泓李灵汐
林泓,李灵汐
(福州大学,福建 福州 350108)
0 引言
我国水系众多,全国各地水坝水库分布广泛,水电水利领域设施建设发达,数量多、分布广、差异大,造成当前我国水电水利基础设施水下检测、清理、勘探难度大,专业团队规模难以满足现实需求。随着机器人技术的发展,水下机器人因其工作高效性、操作便捷性和安全可靠性等诸多优势逐渐代替人工进行水下作业,成为水利水电基础设施定期维护的一大有力助手。当前我国水下机器人的发展具有一定技术积累和经验可循,本文将结合各地有缆遥控水下机器人应用实例针对优点与弊端进行深入思考和初步探析。
1 水下机器人的分类及其特点
根据是否载人,水下潜水器可分为载人潜水器(见图1a[1]、b[2])和无人潜水器两类,其中载人潜水器一般简称为HOV,无人潜水器一般简称为UUV。水下机器人一般是指无人潜水器[3],水下机器人可根据与水面是否有支持设备分为有缆遥控水下机器人(一般简称为ROV)(见图1c[1]、d[4])与自治水下机器人(一般简称为AUV)(见图1e[1]、f[4]),根据运动方式的不同ROV常分为移动式、浮游式和拖曳式三种[5]。

图1 当前典型水下潜水器
HOV的主要作用是在复杂的深海环境下协助科研人员完成高效的资源勘探、周密的科学考察和连续的开发作业等任务。其优点是可为科研人员提供直接观察深海的环境,利于准确地做出决策。目前我国在大深度载人潜水器领域达到世界领先水平,2020年11月10日8时由我国自主设计、集成的万米载人潜水器“奋斗者”号在马里亚纳海沟10909米的深度上坐底,创造了在载人深潜领域我国的历史新纪录,为我国探索深海科学奥秘、保护和合理利用海洋资源提供了又一重要的科研利器[2]。但由于任务安全性差、深海水压大等不利因素,载人潜水器存在着一定的局限性[6]。ROV的最大特点是通过脐带缆连接水面支持设备与ROV,操作人员在水面或岸边通过遥控装置操纵ROV作业。ROV可通过母船获得源源不断的能量,能在水下进行长时间的作业,且可在ROV主体上加装机械臂等作业工具,以适应各种不同场合的使用。AUV则无需通过脐带缆与水面支持设备相连,依靠自身携带的动力,按照人们预先设定好的程序进行自主航行[7]。尽管AUV可极大降低人员风险,但是其动力能源有限,续航时间短,难以执行复杂任务,另外其使用后的回收问题至今没有较好解决方法,特别是在大深度、高辐射、高危险地区使用的AUV回收将更加困难,一定程度上会造成环境污染与破坏。
综上所述,ROV由于其实时性好、稳定性强、续航时间长等优势能够满足绝大多数水利水电工程领域的应用需求,因此在我国已将ROV应用于水利水电工程领域[8]。
2 应用于水利工程水电领域有缆遥控水下机器人的应用现状
2.1 水库大坝闸门的水下检测与清理
若有异物如枕木、泥沙进入水库大坝闸门门槽内淤积或卡死时,很可能会造成闸门落底失败或闸门既无法落下,又无法收回的危险情形。因此为了确保安全需要在闸门进行开启前,确认闸门门槽内的异物状况,如有必要应清理淤积异物,确保综合评估认为不存在安全隐患,方能落放闸门。鉴于开闸次数多、水下异物辨识难、清理工作时效慢等现实情况,难以通过专业人员快速完成检测清理工作,可通过ROV破解上述难题,闸门的水下检测与清理实例如图2所示。利用水下定位系统、水下多波束图像声纳系统,对ROV的水下位置进行确定,同时掌握水下建筑物的结构形状[9-11]。后续操作人员可通过操作遥控手柄,将ROV遥控至闸门处。在近距离水下建筑物的整体通过水下高清摄像和声呐扫描的方式进行观察,对水下闸门的异物情况进行观察并将图像通过脐带缆传输至岸基处。岸上操作人员通过操控机械臂可快速开展堆积物清理工作,并可通过图像实时评估完成进度,为水坝闸门的落放提供了有利的安全保障,相较于潜水员水下作业具有安全性高、工作时间长、作业深度深、操作性简便等优点[8]。

图2 闸门的水下检测与清理实例图
2.2 消力池的水下检测
消力池是水工建筑物常用的消能设备之一,消力池底板的安全稳定是水库大坝正常发电和汛期安全泄洪的重要保证。由于大流量高速水流和夹渣的冲击,消力池底板易诱发空化、空蚀破坏以及磨蚀、冲坑、错台等缺陷,从而由局部破坏带动大面积失稳破坏,存在安全隐患,需要定期检测底板状态。在水质较好的清水环境内,可利用ROV水下高清摄像以及机械手等设施,进行水下检测消力池底板的稳定性,如图3所示。在水质较差的复杂水域环境下,ROV视频摄像技术所拍摄的画面不清晰[9,12-13]。若采用水下多波束图像声纳系统,它发出的声波在遇到被测物后会反射回声纳表面,再利用回波获得被测物的声纳图像信号,因此采用多波束声纳图像并结合水面光线辅助定向措施后,系统便能可清晰辨识消力池的轮廓及尺寸,在百米范围内全方位检测水下消力池底板冲刷破损情况、查明露筋等缺陷位置,较潜水员水下作业更方便安全[14]。
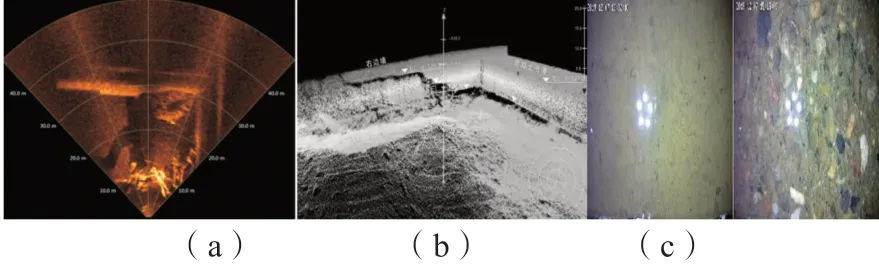
图3 消力池的水下检测实例图
2.3 水库大坝坝体的水下检测
钢筋混凝土材料在我国的水库大坝坝体修建中被广泛使用,随着时间的推移,在水库大坝坝体表面或内部会出现裂缝、空洞等缺陷。大坝库区面积大、水质清,因此可以采用ROV进行具体的水下检测,充分发挥ROV的水下优势。通过ROV携带的水下多波束图像声纳系统对大坝坝体进行检测,确定大坝的渗漏位置,再利用基于CNN的高清摄像技术对渗漏处进行视频观察,同时通过电脑存储图像资料及ROV的位置信息,为后期大坝坝体加固提供资料。坝体的水下检测实例图如图4所示[5,7,15]。
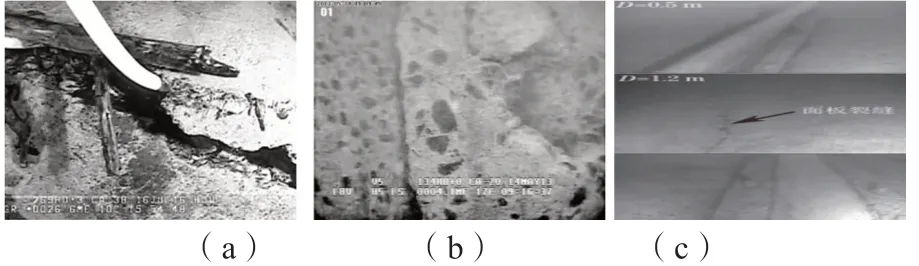
图4 坝体的水下检测实例图
3 应用于水利水电工程领域有缆遥控水下机器人的发展前景
尽管有缆遥控水下机器人在水利水电工程检测中的具有较好的应用现状,但由于实际检测环境可能存在水质较浑浊、脐带揽被水下杂物缠绕、水流较快难以有效控制等情况,始终制约着有缆遥控水下机器的应用前景。因此未来有缆遥控水下机器人应该朝着高智能化、自动化的水下沉积物识别,高效率、高精度的水下沉积物定位,简洁、高效的控制稳定控制等方向发展。
3.1 高智能化、自动化的水下操作
目前水下清理工作依赖于负载机械臂与成像系统相互配合,通常由成像系统反馈目标画面,在岸上操作人员控制下操控机械臂对体积较大的堆积物进行破碎、挖除[16]。当野外水下作业环境泥沙沉积较多,单纯依靠成像系统辨别目标将会使得ROV工作陷入停滞,工作时限与清理效果都难以保证。此外应对体积较小的堆积物时,在水质浑浊条件下对目标物的辨别定位存在一定阻碍。由此可见,有揽水下机器人通常需适应水体巨大、环境复杂、能见度不一的工作条件,应对水下精细化清理任务,因而迫切需要提升ROV智能识别技术,对水下清理对象进行快速辨析和处理、调度系统、自主控制负载在盲像区域开展工作,在一定程度上摆脱ROV对操作人员的依赖性。
3.2 高效率、高精度的水下定位
遥感水下机器人较传统人工作业有着较大的高效优势,应对每年我国汛期水下工程应急监测和应急抢修,ROV因其操作安全性和设备便携性有着巨大的应用空间。但遥感水下机器人所配备的供给动力和输送控制的脐带揽让水下机器人的移动受限,且连接母船与本体的脐带揽在行进过程中被水下杂物缠绕也成为应急操作时的一大隐患[10]。目前各地水库工作应用中常采用成像技术与机械臂操作相互配合对行进过程中的杂物进行移除,从而避免推进器被缠绕而发生系统故障不得不中止作业,但此过程耗时过长,难以应对实际应急水电水利病险探测和抢修工作[5]。而集成声呐探测技术现下主要应用于水电水利工程水下检测领域,如大坝闸门、消力池和大坝坝体等水下结构的水下检测,水下沉积物搜寻目标物的辨识和定位具有一定成效。由此我们可以将声呐探测技术结合智能分析系统对前方障碍物进行趋避,计算出水下最佳行进路线实行绕障碍行进,降低推进器缠绕风险,以提升ROV水下行进速度,缩短移动时耗,为作业实施延长时限,以应对病险水利特殊情况下满足水下情况勘探和抢修应急的特定需求。
3.3 简洁、高效的稳定控制
有缆水下机器人的水下移动主要由岸上操作人员依据水下环境围绕作业目的进行操控,操控系统主要是依据流体动力学结合水下操作的自由度进行耦合性的使用[6],但有缆水下机器人在作业时通常需要根据不同目的搭配不同负载和设备,因此各个作业任务点的不同水下机器人的整体重量等物理参数存在变化,使得目前应用于我国水电水利工程的有缆水下机器人只能满足于流速不大于1m/s的稳定水况,现实情况是在众多坝体检测、应急抢修或是桥洞勘探作业中水流环境往往超出上述限定范围,对有缆水下机器人的运动控制和应用场景都有所影响[17]。因而针对有缆水下机器人作业的可变性,需进一步提升控制算法与水下探测成像稳定性,为机器人在恶劣水环境下水下作业提供更加稳定的控制体系,实现精确、有效的操控。
4 结语
综上所述,有缆遥控水下机器人依靠自身的灵活性可以代替潜水员完成诸如未知水况的急性作业需求,水质恶劣地域的垃圾治理,有毒有害污染物的清除等许多水下工作,并在水利水电工程领域的应用中已经崭露头角,通过所搭载的声呐和摄像头,可对闸门、消力池、大坝坝体等设施进行全方位的检测与清理,大大提升了工作效率与降低了工作风险。但综合目前各方面的技术来看,水下环境复杂多变、水质漩涡等因素均会影响水下机器人的操作,离有缆遥控水下机器人在水利水电工程大规模的应用仍有一定距离,需要进一步提升相关技术,拓宽其使用场景。
