基于MATLAB的三维重载荷转台的运动学分析与仿真
2021-08-09张照宋林森
张照,宋林森
(长春理工大学 机电工程学院,吉林 长春 130022)
0 引言
三自由度转台目前已经成为目前并联结构的转台中最普遍的方式,也是研究者的热门研究对象。并联机构的旋翼转台系统是运动模拟器整个最重要的组成部分,其结构、运动学的问题、动力学的问题、仿真和控制的规律都是重点研究对象,这样既能增加运动模拟器的性能,又能够推动并联机构的相关理论的发展,对于我们国防工程事业和其他类似学科的促进具有很大的意义。
运动学指的是其主动件即输入构件与输出构件两者之间的相互对应性关系。例如,一个已知的输入和给定一个构件提供了相关的参数来求解一个输出和给定一个构件的参数时,叫做运动学的正问题,否则统统被叫做运动学的逆问题[1]。参数可以为位置、姿势、速度等各种参量。在理论分析方面,位置的正反解推导及其分析方法成为机构的运动过程的重要依据。位置的正反解提供了对机构运动加速度、误差、操纵空间、动力学、控制等方面的分析。通过对并联结构与其他串联结构的分析,并联结构反解更加容易,其他串联机构更难了[2]。
本文以三维重载荷转台作为研究对象,推导其位置正反解公式,然后在MATLAB Robotics Toolbox环境下建立其仿真模型,验证公式推导的正确性。
1 三维重载荷转台描述及其坐标系的建立
1.1 三维转台描述
三维转台的机构结构图如图1所示,上平台为运动平台,下平台为方位平台,两者用四根可伸缩的杆件相连接。运动平台与杆件用十字万向节相接,四根可伸缩杆件上分别装有四根电动缸。
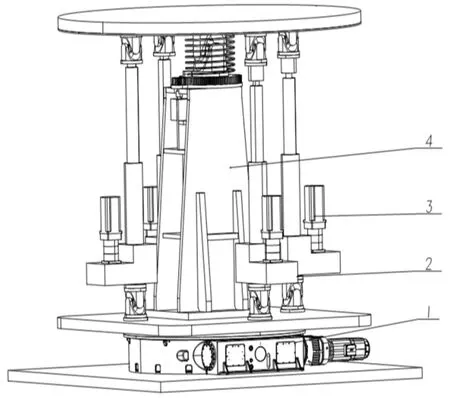
图1 三维转台结构图
1.2 转台功能
三维转台的机构简图如图2所示,其工作原理如下:

图2 三维转台机构简图
(1)侧倾机构是为了实现绕X轴的翻转,翻转的角度范围为±30°。侧倾机构上下两端的万向十字节连接着电缸,通过伺服电缸的伸缩来带动载物平台绕万向十字节转动。
(2)俯仰机构是在两侧电缸的共同作用下,使载物平台绕Y轴的翻转,翻转的角度范围为±30°,拉压力传感器显示电缸上的承载力,缓冲器调节运动过程中的不协调性,保护整个机构的运行。
(3)方位平台主要作用是在旋转平面下安装的旋转机构来带动方位平台上面的机构进行转动,实现方位绕 z 轴±180°的高速旋转。实现绕Z轴±180°的旋转。
2 运动学分析
机器人运动学的很大一部分内容涉及建立各种坐标系来表示刚体的位置和姿态,以及这些坐标系之间的转换[3]。
2.1 三维转台坐标系的建立
为了建立机构的位置分析模型,在方位平台建立参考坐标系{D}-XYZ及在运动平台建立动坐标系{d}-xyz如图3。坐标系{D}是一个在下面的三轴方位平台,以直角边的顶点D1 为三轴方位坐标的原点,D1D3为X轴,D1D2为Y轴,D1d1为Z轴,如图3所示坐标系右手定则。坐标系{d}和上一个运动平台相连,顶点d1为坐标原点,d1d3 为x轴,d1d2为y轴,垂直于上一个平台所在的直线向上为z轴正方向,三轴也为右手定则。其中直角的边长被标记为 R,上下两个平台之间的高度差被标记为 h。

图3 坐标系选取示意图
2.2 位置反解
初始运动状态时一个绕轴运动的固体平台四个轴的铰链连接点d1、d2、d3、d4在{d}中坐标:1d1(0,0,0)、1d2(0,R,0)、1d3(R,0,0)、1d4(R,R,0)。运动的平台四个铰链点在一个参考坐标系{D}的坐标为:0d1(0,0,h)、0d2(0,R,h)、0d3(R,0,h)、0d4(R,R,h)。下面平台四个顶点在{D}中的坐标为0D1(0,0,0)、0D2(0,R,0)、0D3(R,R,0)、0D4(R,R,0)。
假设上运动的平台在没有约束力的情况下做六自由度的运动,对参考坐标系来说做一个平移运动,将运动进行分解,X轴方向移动u,Y轴方向移动v,Z轴方向移动w;然后进行旋转运动,欧拉角组合主要有ZYZ、ZXZ、ZYX。采用ZYX组合。根据空间学的描述及坐标式变换公式可以得出:
平移变换的表达式定义为:

绕x轴旋转α角称其为侧倾角,旋转变换矩阵可变换为:
绕y轴转动β角称其为俯仰角,旋转变换矩阵可变换为:
绕z轴转动干,γ角称其为方位角,旋转变换矩阵可变换为:



由此可得:
上式中由一个顶点组成的第四列顶点矩阵可以用于用来表示上运动均衡平台四个列的顶点分别位于一个不同运动平台坐标系的其中的三条纵轴上所对应占的体积分量。用的平台列或者矩阵图来表达上面的运动是在平台四个列的顶点通过方向旋转或者平移进行运动后放在位于一个参考标准坐标运动体系的图中的三个方向轴上的物体位置和参考坐标的体积。
由转台结构分析可知任一连杆通过一转动副与下平台连接,转动副具有一个自由度,只能绕Dn点在平面内转动,所以有:

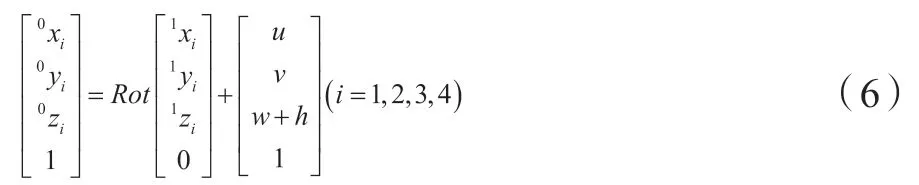
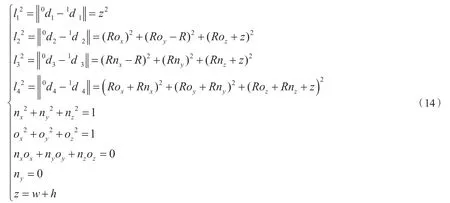
上运动平台四顶点在动坐标系中坐标是固定的,带入到式(3-6)中,并利用上述约束条件可得:

若令式(9)0,则β=π/2或者γ=0,但为了结合实际,y轴转动的俯仰角达不到90°,因此γ=0。结合式(8)可知该结构转台具有三个自由度,即绕x轴转动的侧倾角、绕y轴转动的俯仰角以及绕z轴转动的方位角三个自由度,符合要求。
当方位角γ=0时,有sinγ=0,cosγ=1,将其带入到式(5)中可得旋转变换矩阵为:
上运动平台在经过两个平移转动运动后满足该姿态和位置,具体长度由下式可得。

到此为止就在上平台位姿已知的情况下得到了输入构件即四个连接杆的长度。
2.2 位置正解
上平台和下平台的坐标变换矩阵Rot为:
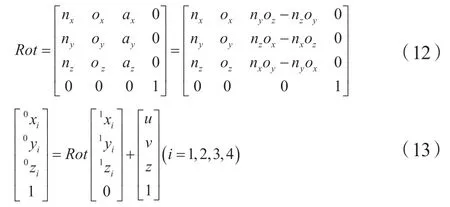
得到了变换后四铰接点在运动坐标系中的坐标:

其参考坐标系坐标为:

由式(14)可得。式中l1,l2,l3,l4,h,ny为已知,带入方程组便可求出旋转矩阵中独立元素的值和平移运动量w,再对应式(10)中各元素可求得α和β值,到此便可求得上运动平台的姿态和位置。
3 转台关节坐标系的建立
D-H法最早是由德纳维特和哈滕伯格提出来的[4],如今已经发展成为了进行机器人设计和建模的一种标准技术方法。从三维重载荷转台的运动学视角来看,三维重载荷旋转台各个支链也都可以被认为是由移动副与转动负载相互连接而形成的开链式结构,类似于一般的机械手,所以我们可以通过应用D-H法来设计和建立三维重载荷转台的运动学模型。
D-H方法具体建立过程为:
步骤1:从一个低序到另一个高序依次寻找一个被定义的轴,把这个轴的运动方向分别设为z0,…,zn-1。
步骤2:首先选择一个坐标系O,将其中的原点固定在z0轴上,选择x0和y0组合起来形成右手坐标系。
步骤3:将原点Oi定位于轴zi、轴zi-1和zi公垂线的交点。对于转动关节,如果轴zi和zi-1平行,则建立原点使得偏置为0;对于移动关节,则将原点建立在关节延伸范围的某一个参考点上。
步骤4:将轴xi建立在轴zi-1和zi公垂线上,其方向由关节i指向关节i+1。
步骤5:根据右手定则,由轴xi和zi轴的方向确定yi的方向。
步骤6:坐标系n的建立由关节n的类型决定,对于转动关节,则按照zn-1来设置zn;对于移动关节,则任意选择zn的方向。按照上述方法建立坐标系如图4 所示。
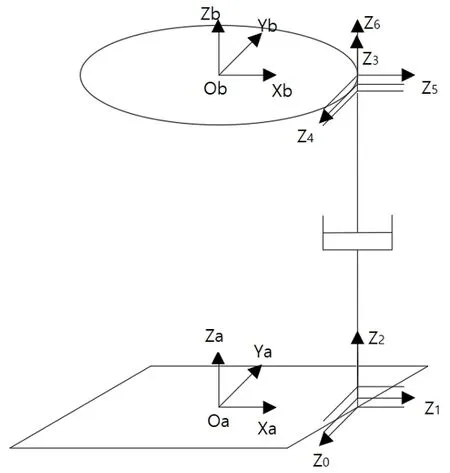
图4 关节坐标系位置示意图
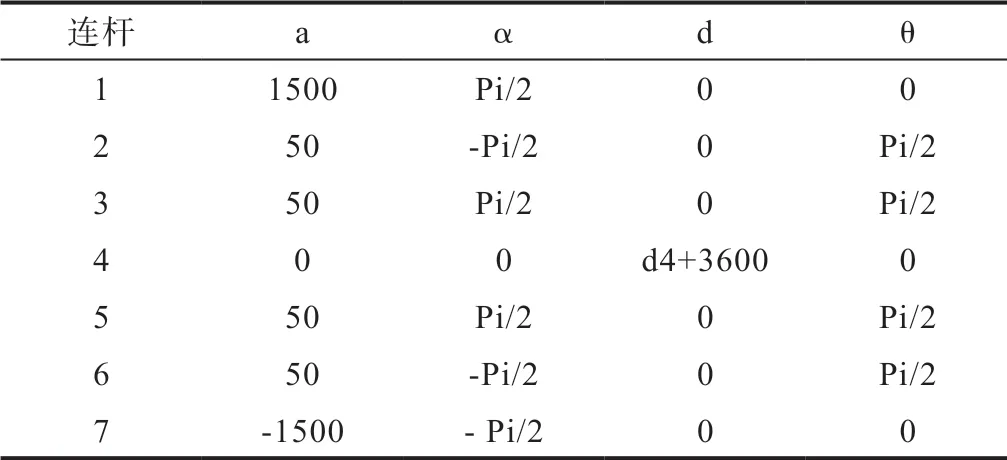
D-H参数表
4 基于MATLAB的运动学仿真
Matlab软件是由美国Mathworks公司专门自主开发研制和设计开发的一款功能强大的系统工程矩阵计算图像应用处理软件,配备了强大的矩阵工程计算图像分析仿真能力,其中所可以使用的计算软件主要包括了Robotics Toolbox工具盒不但让您可以直接为您实现基于机器人运动学的工程图像分析可视化和自动仿真,还同时也让您可以直接对采用手工矩阵计算的正逆方程理解以及结果方法进行计算验证[5]。 本文基于此设计了仿真模型,模拟了机器人在运动和操纵空间的运动。
建立一个函数的指令 Link 将表1中 D-H的参数输入,再通过 SeriaLink函数来构造模型,如图5所示。
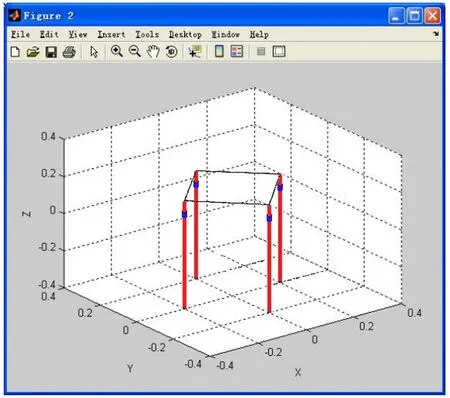
图5 三维转台仿真模型
可以利用MATLAB中的测量功能来测量出需要的角度、距离等变量,以便于运动学解算验证。例如当一个旋转台围绕X轴方向转动时,我们就可以检测出上平台围绕 X 轴方向转动的角度,可以从上面读出四个圆柱副方向各自位移的角度,将这些对应值分别带入要推导的计算公式中,就已经可以从上面所要求的测量值中得到计算值,与这些所要求的测量值进行比较就已经能够检测验证关于这个位置和正反解的推导方法的正确性。
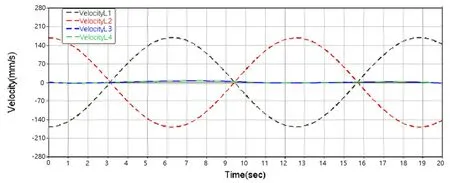
上图是转台做侧倾运动时速度随时间变化的曲线。
5 结语
通过转台的运动学仿真分析,得出该机构末端执行器在实现要求动作时,运动平稳、无位置突变,并且速度、加速度曲线也都比较平缓,无突变现象,反映了该并联机构无冲击现象传递运动性能良好。
利用MATLAB Robotics Toolbox进行三维转台的建模,其次进行运动学的仿真。当转台转动时,我们可以测出转台转动的角度,,验证了该位置的正反理解公式进行推导计算的正确性。
