基于STM32的电子式气动量仪的设计与实现
2021-08-09徐圣阳李原百马旺健樊高一格房杨政胡丹峰
徐圣阳,李原百,马旺健,樊高一格,房杨政,胡丹峰
(苏州大学电子信息学院,江苏苏州,215000)
近年来,随着工业4.0技术的发展和推进,传统生产线上的机械零部件尺寸测量方法已无法满足高精度测量的基础上数据的互联互通[1,2]。目前,我国量具量仪制造技术和产品在总体上更多依赖于引进与仿制以及廉价的人力、物力资源,中低端产品竞争激烈,而高端产品市场难以进入[3]。因此,测量精度高,使用方便,成本较低的量具量仪是目前国内测量行业亟需补缺的空白。
气动量仪作为新型测具,以气体为测量介质,将长度信号转化为气流信号,通过气电转换器进一步转化为电信号,继而进行比较测量[4]。气动量仪由于其以气体为测量介质的特点,相比于其他的测量器具,可测量项目多,人为误差小,且测量头不与被测表面直接接触,可成为高精度测量的主要仪具之一[5~6]。
本项目采用高度集成的设计方案,以有效减小量仪体积,大幅降低生产成本为目标,设计出一款便携式的电子式气动量仪,并对气动量仪的参数设计进行优化,并使用合适的补偿算法,通过滤波算法,减小噪声干扰,极大地提高了测量精度,实现0.1微米的测量精度,使测量结果更为精确[8]。为了在有线通信的基础上优化通信协议,项目采用LoRa无线通信技术,摆脱有线的束缚,使量仪能够在复杂工业环境下实现可靠数据传输[9]。
1 气动量仪测量原理
气动测量的原理是基于流体动力学和流体静力学,依据压缩空气的压力特性和流量特性,对工件的结构和物理尺寸进行测量的方式[4]。气动测量广泛的应用在汽车制造领域,气动测量装置机构简单、操作容易、测量精度高,尤其对于在汽车制造工业要求高精度大批量的零件制造中得到广泛的推广和应用。
气动测量技术通过将空气流量和压力的变化量,转化成工件尺寸的变化,来测量工件的尺寸。气动测量过程中的压缩空气的压力和流量都与气动测量装置和工件的间隙的大小成比例关系,与此同时,压缩空气的压力和流量大小之间成反比关系,压力经过变化的压缩空气流,流过调节阀到达气动测量装置的喷嘴处,当喷嘴孔是直接连接大气压时,喷嘴孔则有最大流量通过,调节阀和喷嘴之间在此时存在一个最小压力,即背压。当障碍物由远及近的贴近喷嘴孔时,从喷嘴孔处流出的空气流量就会因之而降低,此时背压值会升高,当喷嘴孔被完全挡住后,流量将变化为零,这时系统的背压值将会和调压阀的处的出口压力值相等。
在以上的分析中,空气流量的大小逐渐降低,背压值的大小逐渐升高。图1中流量-间隙、压力-间隙的曲线图清晰的反映了这个完整的变化过程。在压力和流量的初始和饱和阶段以外,流量、压力与间隙近似一阶线形关系,气动量仪的测量就是基于这样的正比例关系。当流量增大或减小时,通过这种线性比例关系,准确的得到喷嘴孔与障碍物之间的间隙的变化,即气动测量装置的测与被测零件表面的间隙的变化;同样的,背压值的大小反映了气动测头的喷嘴与被测零部件之间的间隙值。

图1 气动量仪间隙与流量、压力变化曲线图
2 系统硬件方案和软件工作流程
2.1 硬件设计方案
本系统硬件设计总共分为四个模块,整体框图如图2所示。系统通过模数转换模块实现数据采集、稳压模块提供电源并稳定内部电压、无线通信模块实现数据交互、指示模块显示工作状态。以下分为硬件电路设计和无线通信实现两个方面进行说明。
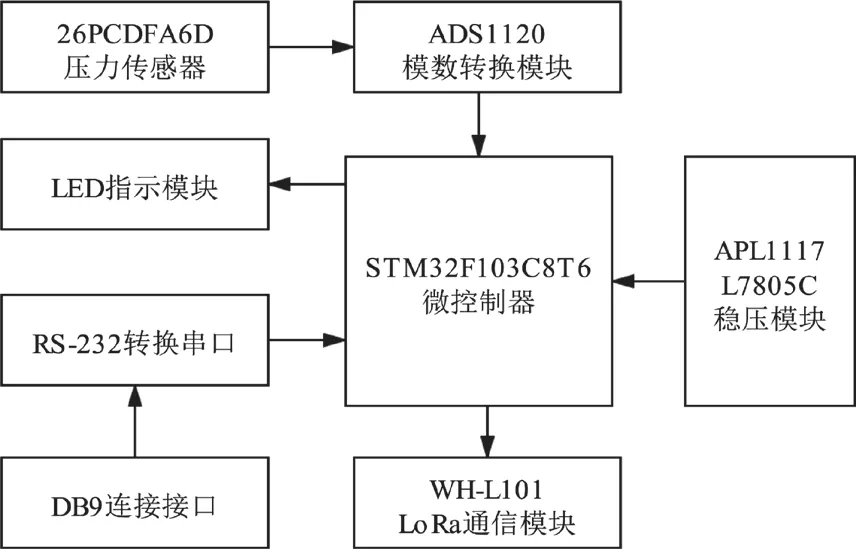
图2 气动量仪硬件设计框图
2.1.1 硬件电路设计
模数转换模块选用具有串行外设接口的16位ADC芯片ADS1120进行数据采集。ADC电路ADS1120可以和传感器桥式电路无缝对接,在其中加入补偿算法保证测量数据的精确度。其中AIN1引脚、AIN2引脚分别对26PCDFA6D压力传感器芯片OUT+引脚、OUT-引脚进行AD采集,并且通过IO引脚PA4-PA7,用SPI通信方式将数据传送到STM32F103C8T6处理器芯片。
稳压模块选用APL1117-3V3三端稳压集成电路稳定输出3.3V电压;选用L7805C正电压稳压器,稳压器稳定输出5V电压,该稳压器不需外接补偿元件,内含限流保护电路,可防止负载短路烧毁元件。
指示模块选用4个LED模块,分别与STM32F103C8T6处理器芯片的PA0-PA3引脚相连,处理器芯片向模块发送指示(低电平有效),用作硬件电路的运行状态、连接状态、接收状态、发送状态的指示信号。
2.1.2 无线通信实现
随着物联网技术的发展,涌现出多种无线技术,在这些技术中,LPWAN通信技术中的其中一种形式LoRa技术出现,它的远距离、低功耗、多节点、低成本的特性,得到了物联网界的认可。LoRa使用线性调频扩频调制技术,保持了低功耗的同时,明显增加了通信距离和网络效率,并消除了干扰,达到即使使用相同频率同时发送也不会产生相互干扰。在LoRa基础上研发出的网关可以并行接收、处理多个节点数据,拓展了系统容量[10]。
在经过甄选后,项目确定选用LoRa无线通信技术,并购买LoRa集中器USR-LG220-L(具体规格如图3所示)、WH-L101系 列LoRa模 块。USR-LG220-L是 一 款基于LoRa私有协议的集中器,通过USR私有协议实现集中器与LoRa节点自由组网、集中器与服务器通讯。它支持1个有线WAN口、1个WI-FI无线局域网、4个LoRa通道(1个管理通道、3个数据通道)、128个信道频段(398MHz~525MHz),支持4G网络接口,以下为具体实现方法。
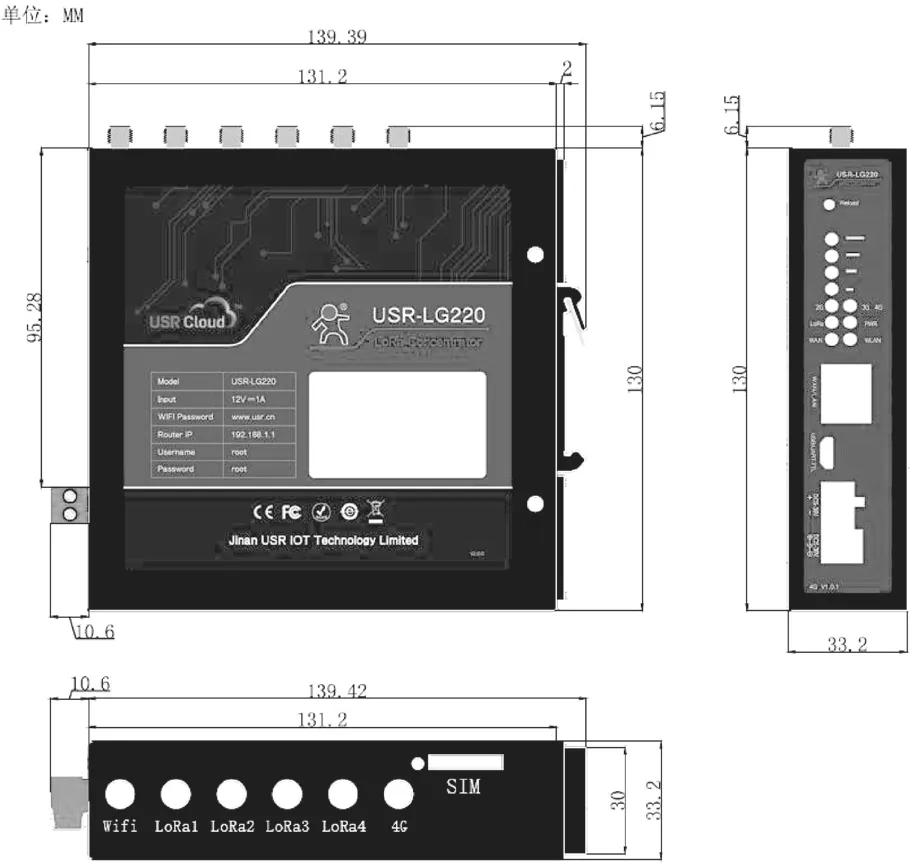
图 3 LoRa集中器USR-LG220-L具体规格图
系统使用24V电源适配器给集中器供电,集中器上电启动完成后用PC或手机可以搜索到集中器的WI-FI热点,连接WI-FI,进入集中器配置网页对其进行数据轮询,保证通信质量。
节点使用LoRa终端WH-L101-C。使用串口线连接LoRa终端RS232接口与电脑,在PC端找到相应串口号并打开串口,波特率默认为115200,设置应用ID、信道、速率。节点上电后会发送入网请求给集中器,入网成功后在集中器配置网页中可以查看入网的节点的信息。用网线将集中器与服务器连入同一局域网,节点入网成功后,集中器会向节点发送轮询数据,此时挂载在节点上的终端设备回复数据,通过节点与集中器发送到服务器,实现无线传输功能。
2.2 软件工作流程
本系统软件部分由C语言程序编写完成。该程序由Keil开发环境在系统计算机的支持下转化为十六进制的机器代码,并产生HEX文件。系统整体软件流程图如图4所示,系统上电后,先用HAL_Init()对STM32的hal库进行初始化,对系统时钟、相应的GPIO口以及与SPI1、USART1、定时器3进行初始化,设置相应的波特率,然后对于SPI连接的ADS1120进行初始化,实时读取与26PCDFA6D压力传感器连接的ADS1120相应寄存器中的数据,然后进入主循环Task_Process()函数。主循环中,通过command()函数,识别不同的功能码,与上位机进行通信。当接收完8个MODBUS的功能码之后,自动清0,重新接收(目前支持的01、05、03、06命令读取或者写入每次都发送8个字节)。最后,对采集到的数据进行滑动平均滤波,再通过Lora模块将处理好的数据发送给上位机。

图 4 系统软件流程图
其中,在采样端,传感器输出的信号往往存在非线性的情况,如直接进行线性化处理会带来非线性误差,因此需要进行必要的补偿,使传感器工作在所要求的精度范围内[11]。而通过对标准件的气压数据采集,拟合出一定限度内的精准尺寸函数,即在判断器件合格的基础上输出测量尺寸。
3 系统测试结果
本系统采用24V直流电源供电, APL1117-3V3三端稳压集成电路稳定输出3.3V电压对指示模块等供电,L7805C正电压稳压器稳定输出5V电压对AD模块供电,24V直流电稳定供给通信模块,并提供天线实现无线传输。图5所示为整体系统现场测试图,系统内部集成一个Honeywell公司的26PCDFA6D压力传感器芯片,通过桥式电路连接到TI公司的ADC电路,采集气压数据,然后通过SPI接口向单片机STM32F103C8T6发送采样数据,最后,单片机通过Lora无线通信模块将采样数据发送出来,实现串口通信与无线通信的无缝对接。整个电路板的气管连接部分通过灌胶方式密封,以达到测量气路的气密性。工作流程图如图6所示。

图 5 整体系统现场测试图

图 6 系统工作流程示意图
在无线节点端,通过PC端连接集中器的WI-FI热点进行设置,如图7所示,在节点入网后由集中器进行轮询,以保证数据实时传输。

图 7 WI-FI设置示意图
4 结语
本方案使用合适的处理算法,使得结果更加精准,可测得高精度零件尺寸。与此同时,通过优化软硬件的设计,将测量仪器高度集成化,复杂的连接线和接口集中到一块电路板,实现电子式便携气动量仪,体积小于同类产品,能够在零件产线上在线测试;运用工业物联网,冗长的工业总线被稳定的无线通信替代,摆脱有线的束缚,并能将结果及时反馈给工控机,有效地实现了气动量仪的便携性,极大降低了成本。
