基于TBM自动测量导向系统的输水隧洞测量控制技术研究
2021-08-08白文彬
白文彬
(辽宁西北供水有限责任公司彰武管理处,辽宁 阜新 123200)
输水隧洞高精测量对于其工程建设质量具有十分重要的意义,长期以来,对于输水隧洞工程测量常采用经纬仪进行人工观测,这种方式的优点在于测量精度一般较高,但是缺点也较为明显,测量周期长,自动化程度相对较低,常常影响工程的施工进度[1]。近些年来,TBM自动测量导向系统结合激光探测原理,在一些隧洞工程在得到应用和推广[2-8],通过实际工程应用表明,这种方式可实现隧洞横向和纵向断面的快速自动化测量,其可通过测量误差评估。当前,该测量系统已经在辽宁地区的输水隧洞得到应用,为保证该系统的测量精度,需要在工程实践中对该测量系统的误差进行分析,并对其测量质量控制措施进行制定[9]。为此文章结合工作实际,对TBM自动测量导向系统的贯穿精度进行分析,研究成果对于输水隧洞工程高精测量具有实际意义。
1 测量误差评估方法
TBM自动测量导向系统需要对横向和竖向测量误差进行分析,其误差评定方程分别为:
(1)
(2)
(3)
式中:myβ为横向测量误差评定值值,mm;myl为由于测距影响的横向误差评定值,mm;mβ为导线控制误差,″;ml/l为中轴导线控制误差,mm;Rx和dy分别为纵向投影距离,mm;n为测定次数。隧洞内外对其贯穿测量影响误差评定方程为:
(4)
(5)
(6)
式中:mh、m′h分别为隧洞内外贯穿测量误差,mm;M△、M△′分别为隧洞内外高程测量误差,mm;L和L′分别为隧洞内外水准观测区间距离,km。为了简化隧洞导线布设,横向贯通误差以导线两端作为误差控制节点,考虑隧洞横向贯通测量精度要求,对其误差控制进行改进:
(7)
式中:mb为横向贯通误差评估值,mm;ms为平均测定误差。mm;n为导线布设的条数;mβ为测量误差偏转,″;ρ为测量控制参数;L为导线的总距离,mm;h为导线两个断面之间的高差,mm。
2 误差评定等级划分
结合《水利水电工程施工测量规范SL52-93》对TBM自动测量导向系统的横线贯穿误差等级进行标准等级的划分,划分结果如表1和表2所示。
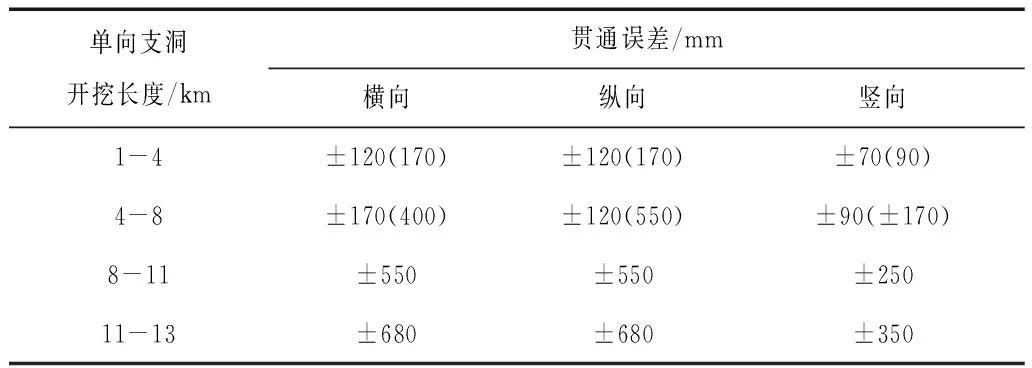
表1 开挖隧洞测量误差分布
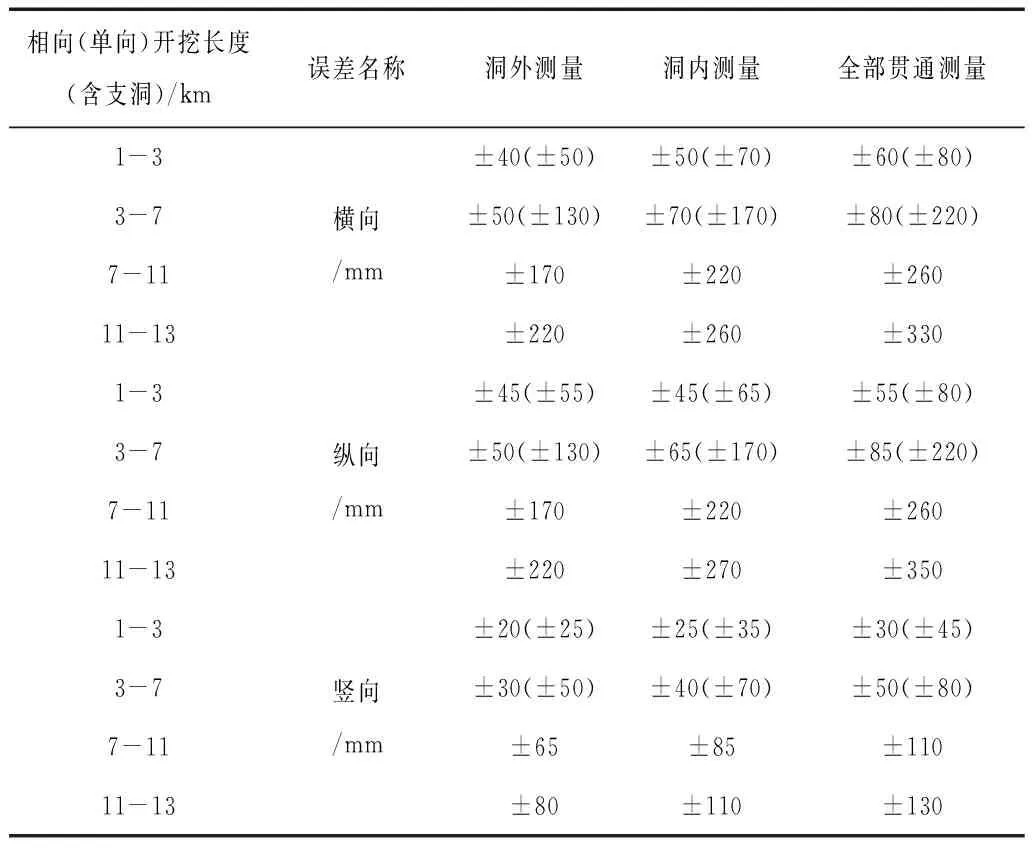
表2 隧洞内外贯通误差标准
3 工程实例分析
3.1 贯穿误差分析
结合辽宁某输水隧洞工程为实例,对该工程三个标段的TBM自动测量导向系统的贯穿误差进行评定,误差评定结果分别如表3、表4以及表5所示。

表4 某输水工程第一标段贯穿误差分析结果

表5 某输水工程第二标段贯穿误差分析结果

表6 某输水工程第三标段贯穿误差分析结果
输水隧洞整个分为3个标段进行施工,第一个标段支洞开挖深度为14.5km,支洞布设的贯通面导线长度为13.5km。采用二等测量标准进行洞内平面质量控制。第二个标段双向贯通长度为10.6km,第三个施工标段支洞开挖深度为10.2km。从各标段横向贯通误差评定结果可看出,各方向贯通误差均可满足允许测量误差的要求,TBM自动测量导向系统在各标段测量中具有较好的测定精度。
3.2 TBM轴线方向误差评定
为保证TBM自动测量导向系统的轴线测定精度,对该测量系统的轴线误差进行评定,结果如表7所示。
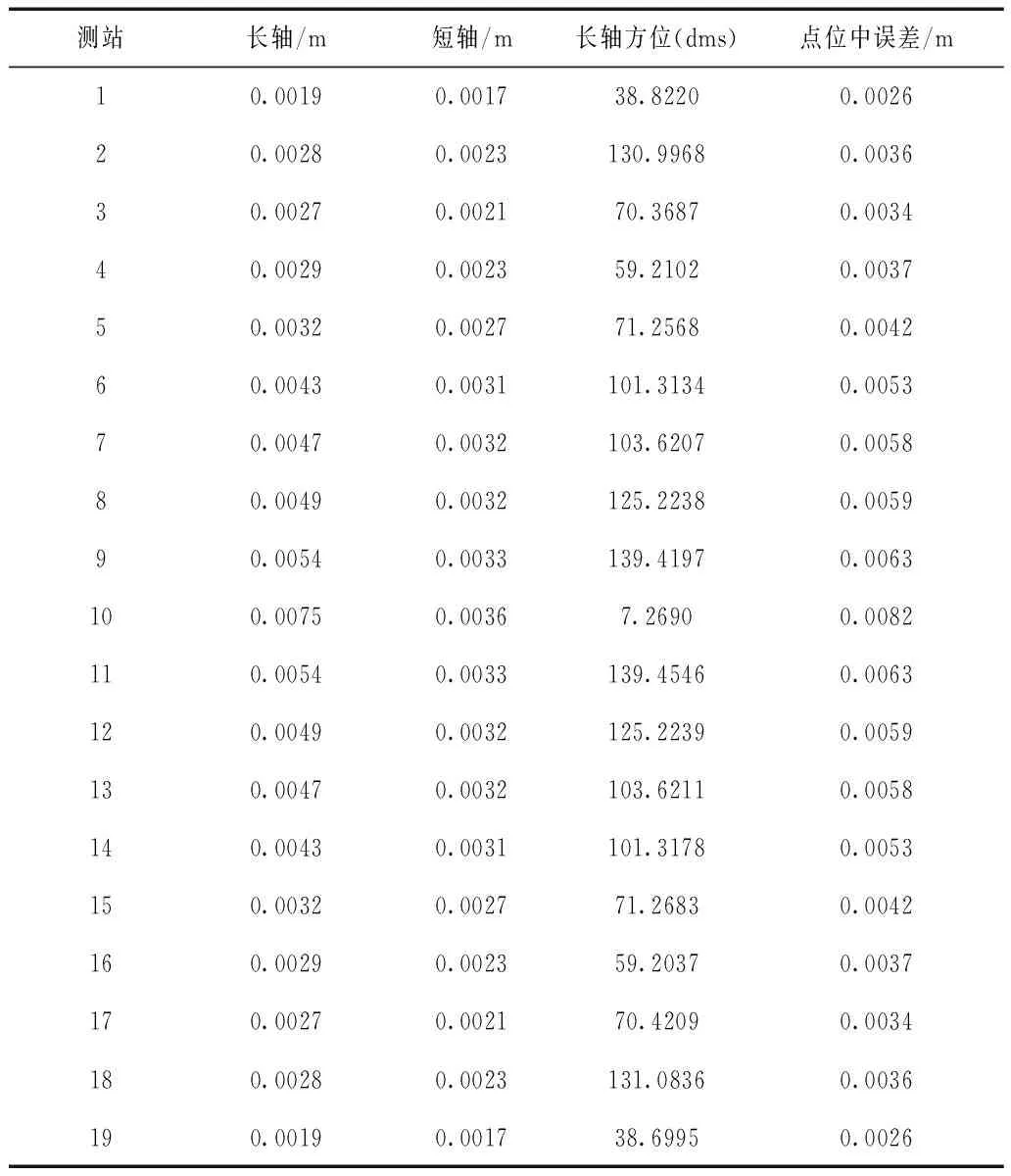
表7 TBM自动测量导向系统轴线误差评定结果
TBM自动测量导向系统轴线误差可满足隧洞施工的轴线测量误差规范要求,测量误差均低于0.01m,因此在隧洞施工过程中,采用TBM自动测量导向系统可较好的满足隧洞施工测量和支洞开挖轴线的要求。这主要因为TBM自动测量导向系统可实现观测轴线连续、高密度激光测定,并将轴线偏离数据在终端进行实时显示,工程测量人员可按照这个轴线偏离数据对TBM挖掘轴线进行不断调整,从而保证轴线的高质量控制。
4 质量控制措施
1)当系统不能对隧洞开挖断面进行偏差质量控制时,可以在主导线范围内加密电子全站仪的观测次数,多次采集全站仪的坐标数据,反复测定采集点的高程测量数据,从而对其测量精度进行控制,是提高TBM自动测量导向系统测量精度的重要措施。
2)对于施工环境干扰,使得TBM自动测量导向系统仪器和棱镜无法正常工作的质量控制措施时,应及时进行尘和通风,若遇到干扰较大情况下在施工现场加大通风,见两个棱镜与电子经纬仪之间的间距保持在75m之内,对导向系统原无线连接方式采用有线连接方式进行替换,保持数据传输的通畅率。
3)在工程施工中降低设备自振施工灰尘对TBM自动测量导向系统数据采集的影响,数据较为稳定和精准的时期主要集中在系统启动和换步期间,TBM开挖测量精度分析主要通过其断面开挖情况进行相对应的反映。
5 结 论
1)TBM自动测量导向系统可实现观测轴线连续、高密度激光测定,并将轴线偏离数据在终端进行实时显示,工程测量人员可按照这个轴线偏离数据对TBM挖掘轴线进行不断调整,从而保证轴线的高质量控制。
2)若遇到干扰较大情况下在施工现场加大通风,见两个棱镜与电子经纬仪之间的间距保持在75m之内,对导向系统原无线连接方式采用有线连接方式进行替换,保持数据传输的通畅率。
