结合改进红通道先验与幂律校正CLAHE的水下图像复原方法
2021-08-06朱佳琦周丽丽闫晶晶王桥桥蒋玉红何立风
朱佳琦,周丽丽,闫晶晶,王桥桥,蒋玉红,何立风
(1.陕西科技大学 电气与控制工程学院,陕西 西安 710021;2.陕西科技大学 电子信息与人工智能学院,陕西 西安 710021)
0 引言
水下图像是一种重要的信息载体,在水下资源勘探、水下环境监测、海洋军事工程及水下机器人等研究领域有着重要的意义[1]。在水下环境中,水分子和悬浮颗粒对可见光的散射会造成水下成像模糊,不同波长可见光在水中衰减程度不一致会使得水下成像产生色偏,最终导致水下图像出现明显的退质现象。因此,水下图像复原具有很大的现实意义。
在研究方向上,主要是图像增强和图像复原,二者的结合使用也较为普遍。图像增强是通过提升图片的对比度或色彩系数等改善其视觉效果,典型算法如Retinex 算法[2]、CLAHE 算法等,在处理亮度较大的图片时,该类算法存在放大噪声,色彩校正过度等问题。图像复原则是基于图像退化过程的先验知识,将其恢复还原,近年研究较多的有暗通道先验算法[3]。结合水下成像特点,2016年Li 等人[4]采用G,B 两通道求取水下图像透射率,规避R 通道的影响,增强了图片的清晰度;曹美等[5]利用通道直方图的统计特性预估暗通道先验模型中的水体光强,并利用双边滤波优化模型中的透射率,在此基础上利用灰线性拉伸方法进行颜色校正;2018年徐岩等[6]基于各通道透射率图与光学传递函数的关系,采用逆滤波及高斯分布线性拉伸去除前向散射分量、提高图像对比度。在采用暗通道先验理论时,常选取整幅图像暗通道前一定占比像素值的均值作为背景光值,该方法易受白色物体、人工光源等因素的干扰,造成估计偏差;而仅采用G,B 通道预估透射率又进一步引入色偏问题。2019年,李炼等[7]将图像复原和图像增强方法相结合,基于红色暗通道先验和CLAHE 算法进行水下图像增强,一方面可以克服结果偏蓝偏绿的问题,另一方面提升图像对比度。然而CLAHE 算法易产生高光伪影等问题。近年,在图像增强、复原领域,又相继提出了图像融合[8],基于场景深度先验[9]以及归一化幂律校正等算法[10]。
针对上述问题,本文提出一种结合改进红通道先验和幂律校正CLAHE 算法的水下图像复原方法。该算法首先通过选取最佳背景光取值区域的方式来规避干扰,以提高背景光预估的准确性,然后使用红通道先验理论进行图像复原,并对复原结果进行归一化幂律校正,最终使用CLAHE 算法进行图像增强处理。下面主要对水下光学成像模型、本文的图像复原算法原理以及实验进行介绍。
1 水下光学成像模型
如图1所示,水下光学成像模型[1]主要由直接照射分量Dλ,前向散射分量Fλ和后向散射分量Bλ三部分组成。即水下图像Iλ可表示为:

图1 水下光学成像模型Fig.1 Underwater optical imaging model

式中:λ表示R,G,B 三通道。该模型可进一步表示为:

式中:Jλ(x)为待求目标场景;tλ(x)为透射率;gλ(x)为点扩散函数;Bλ,∞表示水体光照度。一般情况下拍摄水下图片时,相机距景物距离较小,可以忽略前向散射分量的影响,则水下成像模型最终可表示为:

而Jλ(x)可表示为:

根据公式(4),Jλ(x)的求解实质上转化为对Bλ,∞的预估及tλ(x)的求解。
2 水下图像复原算法
本文的水下图像复原流程主要有3 个部分:首先提出超像素图像分割算法获取背景光取值区域的方法,提升背景光预估准确性,并采用红通道先验算法进行红通道信息补偿,求取预估透射率,获得初步复原图像;然后利用归一化幂律校正对由红通道先验复原的图像进行预处理,以改善后续直方图均衡化所产生的伪影;最后使用CLAHE 算法进行图像增强。如图2所示。
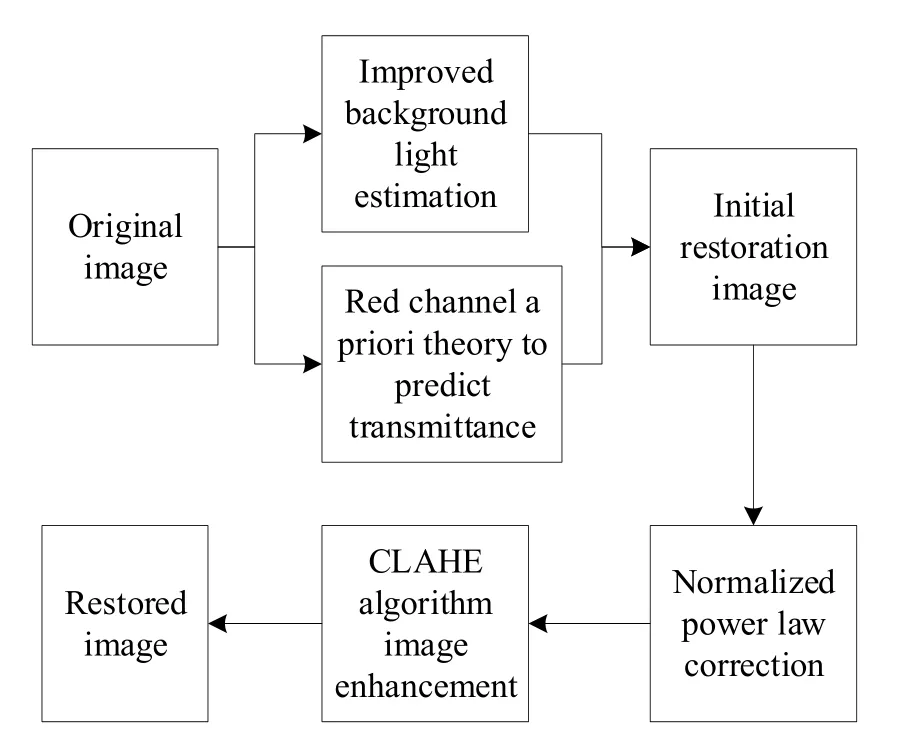
图2 本文所提算法流程Fig.2 The algorithm flow proposed in this article
2.1 改进的背景光预估方式及红通道先验算法处理
2.1.1 改进的背景光选取
理论上,背景光是图像无穷远处的光源数值,其所在区域应该是平滑无纹理的。假设水下图像拍摄方式存在两种情况:一种是俯视拍摄,此场景下难以获取无穷远处的背景光,但是成像距离较近,场景照明度比较均匀,可直接选取全局暗通道前一定占比的像素值均值作为背景光值;另一种是水平拍摄,此时图片中存在一定的无纹理平滑区域,本文则在该区域进行背景光预估,取值方式为将前一定占比的像素值均值作为背景光值。
图3(a)为水平拍摄的水下图像,此处背景光所在区域的判定方法采用超像素图像分割算法[11],首先通过k均值聚类方法生成超像素,然后进行图像分割,再利用连通域标记方法得到区域边界信息,并对图像进行二值化处理,如图3所示。图3(d)白色部分即为背景光取值区域。文中聚类中心k=4,背景光取值占比为0.1%。
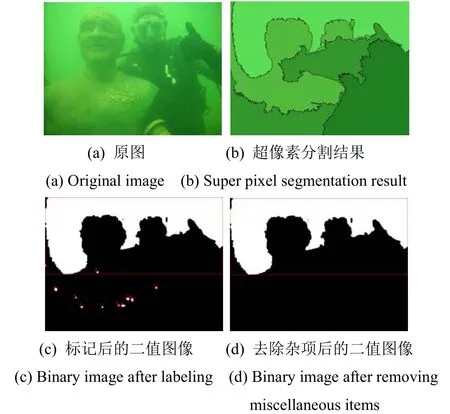
图3 超像素分割及其二值化区域邻接图Fig.3 Superpixel segmentation and Binary area adjacency graph
2.1.2 红通道先验算法
2011年,HE 等人[3]针对图像去雾提出的暗通道先验算法,具有较强的普适性和鲁棒性。该算法假设在大多数非天空场景无雾图像的局部区域中,至少有一个彩色通道的像素值具有非常低的强度,即:

式中:Jλ表示待求无雾图像的R,G,B 三个通道;Ω(x)表示以x为中心的局部块;Jdark表示图像J的暗通道。根据雾天成像模型[3],利用暗通道进行雾天图片透射率预估可得:

进而可得透射率tλ(x):

根据得到的透射率及预估的背景光即可求得Jλ。水下成像的降质原因与雾天成像类似,均是由于环境中的介质微粒对光散射的影响,这将导致场景可见度降低,图片出现模糊,除此之外大多数水下场景也存在着阴影或某些颜色鲜艳的物体,满足暗通道先验成立条件。因此,暗通道先验算法理论上亦可用于水下图像复原。但与大气场景不同,水体对不同波段的可见光具有不同的吸收衰减效应。根据朗伯比尔定律[2],红色可见光衰减最严重,蓝绿色光次之。直接采用公式(7)会导致tλ(x)预估偏差大。为解决该问题,Galdran等[12]提出红通道先验理论,将公式(7)修改为:
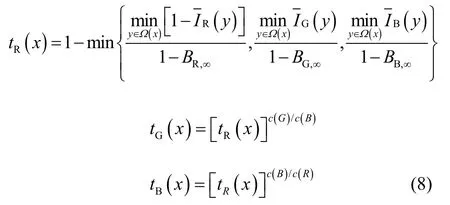
式中:tR(x),tG(x),tB(x)分别为Iλ(x)三通道的归一化透射率;分别为3 个通道的归一化强度值;BR,∞,BG,∞,BB,∞分别为估计的各通道背景光强度值;c(R),c(G),c(B)则分别为各颜色光的衰减系数值,本文在计算衰减系数比值的过程中,选取红、绿、蓝光的波长分别为620 nm、540 nm、450 nm[13]。为解决暗通道先验模型进行图像复原时存在的块效应[3],本文对透射率图进一步采用导向滤波细化处理[12]。
2.2 基于归一化幂律校正的CLAHE 算法
CLAHE 算法是对传统自适应直方图均衡(Adaptive Histogram Equalization,AHE)方法的改进[10],通过限制每个像素邻域的对比度来抑制AHE 方法的噪声放大现象,增强图像视觉效果,但该算法仍然存在图像亮度过度增加的问题。2020年Shi 等人将归一化幂律校正引入该方法以解决上述问题,并将其应用于沙暴天气图像处理[10],本文为了抑制对比度失衡的问题在使用CLAHE 算法进行水下图像增强时,亦引入该归一化幂律校正方法。
幂律变换[11]是一种灰度转换函数,可用于校正图像对比度失衡的问题,其函数定义式如下:

式中:Jλ,RDCP为红通道先验处理后各通道的归一化图像;Jλ,correc为经过幂律校正的图像;γ为幂律值;c为控制亮度的常数。通过改变参数γ的值可以控制变换函数。为了防止γ值过大,图像由于过度补偿变暗,将式(9)进一步归一化处理,即:
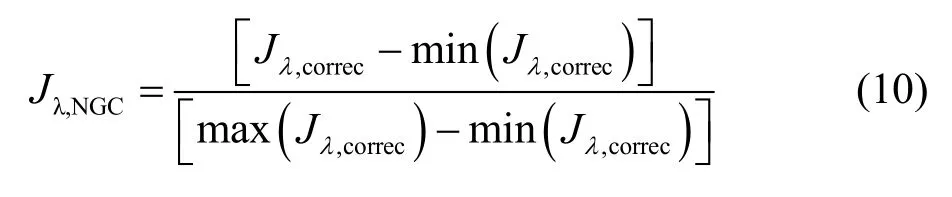
式中:Jλ,NGC是归一化幂律校正后各通道的灰度图。通过统计归一化的全部动态范围特征,归一化幂律校正有助于降低亮度和增强对比度,用以改善CLAHE的增强效果。一般而言,在使用幂律校正时选取c=1,然后根据经验确定γ的值,本实验中为了抑制高光,补偿图片动态范围,最终根据实际效果选取γ=0.5。
CLAHE 算法[10]过程如下:
1)将幂律校正后的各通道灰度图Jλ,NGC分别分成一定数量的连续不重叠子块,每个子块大小为M×N,本文中M=N=8。
2)使用累计分布函数fi,j(n)计算每个子块的灰度直方图:

式中:hi,j(k)是像素k的灰度直方图索引;M,N和n=1, 2, 3,…,N-1 是每个子块中的像素数;i和j是像素k的位置索引。
3)计算裁剪极限值β:

式中:α是裁剪因子,取值范围为[0,100];Smax是最大斜率,取值范围为[1,Smax]。
4)对超过β的直方图进行裁剪,并将所有裁剪下来的像素值重新均匀分配到各灰度级中以保持直方图总面积不变。
5)获得每个子块的中心点。将这些点作为样本点,利用双线性插值求出各像素点的灰度值,得到经CLAHE 增强的各通道灰度图,融合后即为最终的增强结果。
3 实验结果与分析
该部分将本文算法结果与近年提出的基于场景深度先验算法、图像融合算法和红通道先验算法的处理结果进行比对。
3.1 定性分析
图4~7 四组图片给出了原图及分别采用4 种方法的处理结果。从图中可以看出,场景深度先验算法的处理结果具有一定程度的去模糊效果,相较于原图细节更加丰富,但是与本文算法相比,色彩还原较差,基本维持了原图的色偏现象,而图6(b)则出现明显的红色色偏问题;图像融合算法的处理结果色彩较为柔和,比较符合人眼视觉习惯,但是与本文算法相比,该算法的清晰度稍差,如图4(c)中的岩石和图6(c)中的水草,阴影较为模糊,对比度偏低;红通道先验算法处理结果较为均衡,在去模糊和色偏校正上均取得了一定效果,但是对比度稍逊于本文算法,细节上不够明显,层次感稍弱。显然,文中方法的处理效果具有对比度更强、细节更突出、色彩恢复更真实以及高光更柔和等优点。

图4 海底地面Fig.4 Sea floor

图5 珊瑚Fig.5 Coral
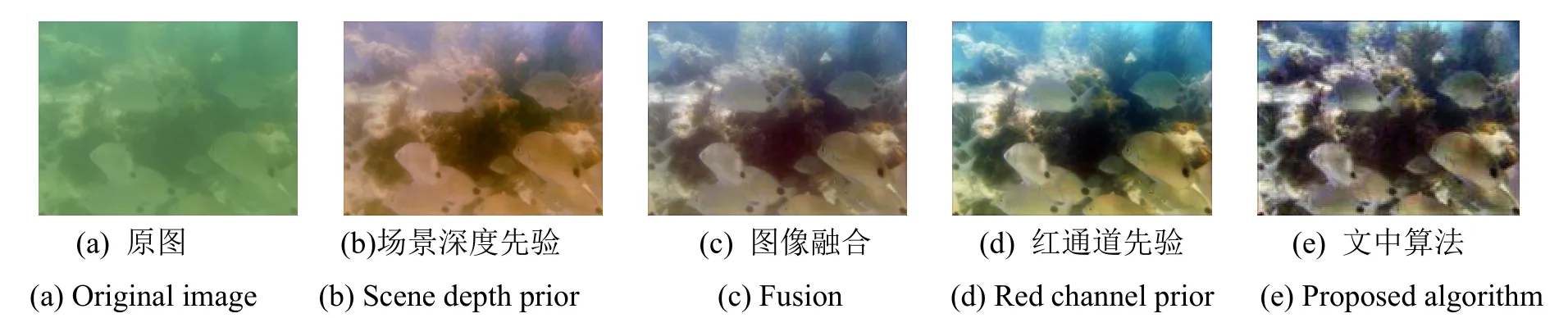
图6 鱼群Fig.6 Fishes
3.2 定量分析
主观上对图像的评价具有个体差异性,不够准确。因此,需要采用客观评价方法进一步分析。在图像质量评价方面,采用平均梯度、彩色图片信息熵以及最大对比度与最小伪影(Maximizing Contrast With Minimum Artefact,MCMA)[14]3 种图像质量评估标准对实验结果进行客观分析。其中平均梯度通过图像边缘灰度变化率的大小来反映图像的清晰度和纹理变化,其值越大说明图像越清晰;彩色图片信息熵则表征图像的平均信息量,其值越大说明色彩越艳丽,色偏校正效果越好;MCMA 通过视觉质量改善和信息保存两个因素来衡量对比度增强方法的性能,其值越高,表明图片的视觉效果越好,信息保存越好。由表1中的数据可以看出:
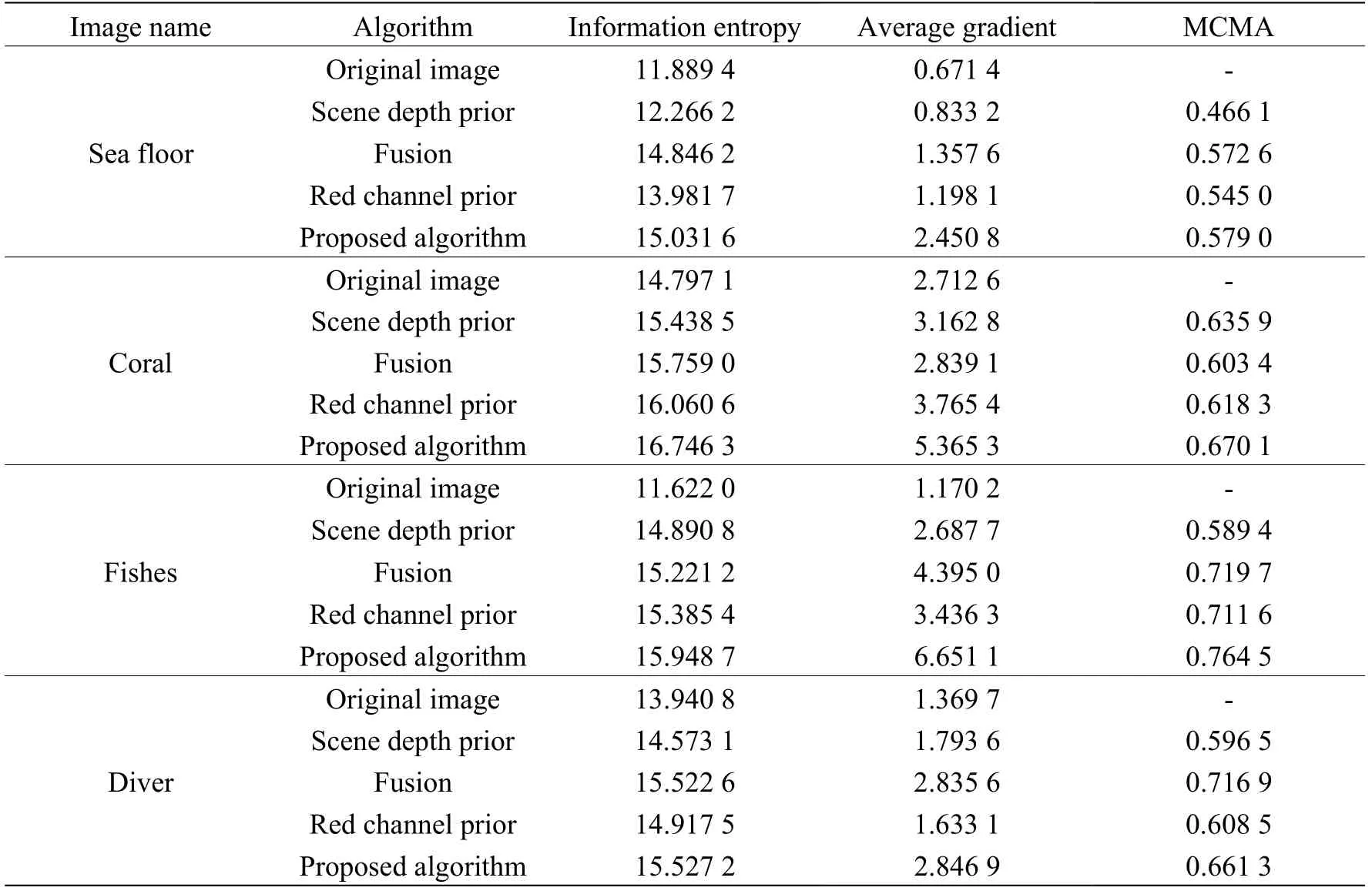
表1 各项评价指标值Table 1 Evaluation index values
1)4 幅图像经过各算法处理后,图像信息熵较原图均有一定幅度的提升,但是场景深度先验算法受图像影响较大,提升效果有一定起伏,鲁棒性稍弱。而本文算法不仅提升效果较为稳定,且始终高于其他算法,表明使用本文算法,会获得色彩信息更加丰富的结果。
2)从平均梯度数据对比中可以看出,对于图4~6,本文算法相较其他3 种算法而言,平均梯度值均有显著提升,在图7中,也仅有图像融合一种算法结果较为接近。可见本文算法结果更加清晰,纹理更加明显。

图7 潜水员Fig.7 Diver
3)从MCMA 数据对比中可以看出,本文算法的处理结果,除在图7中稍逊于图像融合算法的结果外,均优于其他算法的结果。说明本文算法能够在保存信息的同时,获得良好的视觉质量改善效果。
综合考虑图片质量改善程度和人眼视觉效果,本文算法具有更好的适用性和明显的优越性。
4 结语
本文针对水下图像画质模糊,色偏严重等问题,提出一种结合改进红通道先验和归一化幂律校正CLAHE 算法的水下图像复原方法,该方法首先对背景光预估方式进行改进,用以避免水下环境中白色物体和人工光源的影响,然后根据水下成像特点利用红通道先验理论对图像进行去模糊处理。为了避免进一步图像增强时因亮度过度增加而产生伪影,对处理结果进行归一化幂律校正,再采用CLAHE 算法进行图像增强。最后通过主观和客观的评价方法对本文算法进行了评估。结果表明,本文的方法能够提高水下图像的画质,保留图像细节信息的同时去除模糊,而且复原图像色彩准确,贴近自然,具有一定实际应用价值。
