单光子激光雷达航摄技术在地质资源规划设计调查的应用
2021-08-06张天巧
张天巧
(广州建通测绘地理信息技术股份有限公司,广东 广州 510663)
地质资源规划设计调查是以国有地质局(场)、自然保护区、森林公园等森林经营单位或县级行政区域为调查单位,以满足森林经营方案、总体设计、林业区划与规划设计需要而进行的地质资源调查。其主要任务是查清森林、林地和林木资源的种类、数量、质量与分布,客观反映调查区域自然、社会经济条件,综合分析与评价地质资源与经营管理现状,提出对地质资源培育、保护与利用意见。调查成果是建立或更新地质资源档案,制定森林采伐限额,进行林业工程规划设计和地质资源管理的基础,也是制定区域国民经济发展规划和林业发展规划,实行森林生态效益补偿和地质资源资产化管理,指导和规范森林科学经营的重要依据[1]。
机载LiDAR测量系统是一种主动航空遥感装置,是实现地面三维坐标和影像数据同步、快速、高精确获取,并快速、智能化实现地物三维实时、变化、真实形态特性再现的一种国际领先的测绘高新技术。
单光子激光雷达航摄技术和线性激光雷达最大的区别在于接收器,它搭载了非常灵敏的接收器,甚至可以对单个光子进行探测,单光子探测体制的信号光子利用率高,探测器噪声相对较小,因而基于单光子探测体制的激光雷达所需激光器的单脉冲能量与基于回波波形采样体制相比要低几个数量级。更低的单脉冲能量意味着激光脉宽可以压缩到更窄,激光器重频可以达到更高;同时也更容易实现多波束并行发射,缩短地形地貌测绘的时间;还可以获得有关表面坡度和粗糙度的信息,实现高精度、高分辨率的空间高程测绘,这项技术最早被应用于航天卫星对地距离观测上,它允许使用更小功率的激光发射器以及对更弱的激光脉冲进行测量。因此,将单个激光器的脉冲分为10x10个光束进行发射和接收,激光雷达的测距方式由“点”转换为“面”,可以获取更密的点云数据,对地面的描述更为详细。实现了不管在白天日光散射干扰严重的情况下,或是密集植被区域多次反射条件下,都能获取到正确的地物/地面信息及强度信息,将单光子激光雷达的应用范围大大拓展。
1 单光子激光雷达航摄技术原理
目前我们最常接触到的机载激光雷达,例如徕卡ALS系列机载激光雷达,使用的都是线性接收器,即每束激光脉冲发射后,经过地物的一次或多次反射,且反射能量超过接收器阈值时,就会被当做一次“有效回波”记录下来,而且回波强度信息和回波能量呈线性相关。

图1 线性激光雷达测量方式示意图
线性激光雷达所获取的数据具备很高的空间和辐射精度。然而,这项技术在提高最大有效脉冲频率时会遇到瓶颈,受制于激光回波必须要具备“较高能量”才能被接收器所探测到,所以目前最顶级的线性激光雷达,如徕卡TerrainMapper,每秒钟有效脉冲频率约2.0MHz,大多数线性激光雷达都无法达到这一指标。通常线性激光雷达的有效脉冲频率等于“激光器有效脉冲频率x激光器个数”。
徕卡SPL100单光子激光雷达,和线性激光雷达最大的区别在于接收器,它搭载了非常灵敏的接收器,甚至可以对单个光子进行探测,这项技术最早被应用于航天卫星对地距离观测上,它允许使用更小功率的激光发射器以及对更弱的激光脉冲进行测量。因此,SPL100将单个激光器的脉冲分为10x10个光束进行发射和接收,激光雷达的测距方式由“点”转换为“面”,从而将有效脉冲频率的计算方式更新为“激光器有效脉冲频率x光束数量”,即60kHz x 100=6.0MHz。

图2 单光子激光雷达测量方式示意图
利用航拍影像(包括原始斜片影像和处理后的正射影像)中包含的建筑的图像信息,为城市建筑模型创建纹理贴图。
2 单光子激光雷达航摄技术及产品
为了验证该技术,我们在广西地质资源规划设计调查采用了最新的单光子激光雷达航摄技术。
2.1 采用的单光子设备
Leica SPL100是徕卡测量系统推出的首台使用了Sigma Space科技的传感器,徕卡SPL100通过100个光束可以前所未有的实现每秒钟采集600万个激光点,HxMap能够在单操作界面下提供完整的后处理相关功能,并且生成行业标准的影像和激光点云产品。徕卡SPL100的高效数据获取效率和HxMap的强大后处理能力,能够实现大范围或更加常态化的激光数据获取,可以支持密集植被测绘或变化检测等行业应用。
Leica SPL100系统参数:
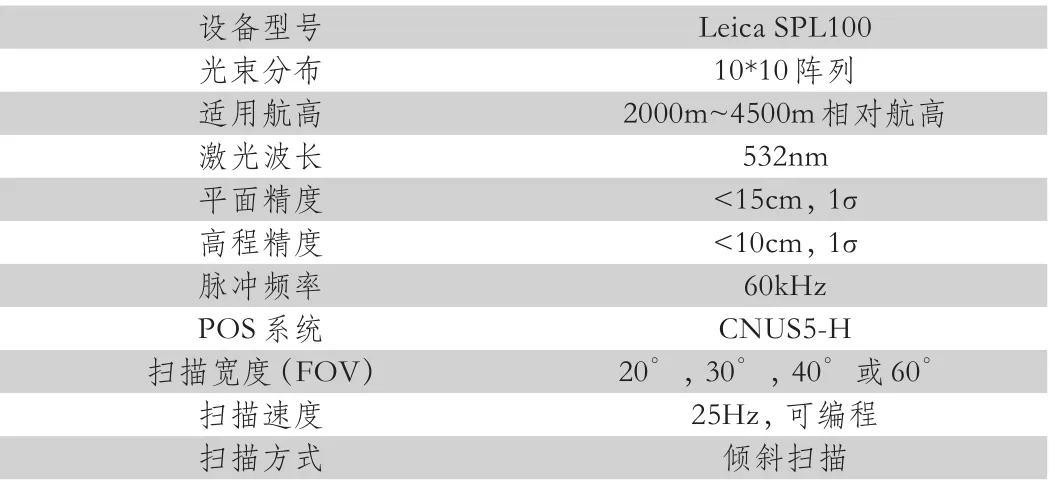
表1 Leica SPL100系统性能参数表
2.2 航飞设计
基于单光子技术的发射频率比传统激光高6倍以上,本次航摄的设计航高也比传统激光要高,飞机地速大大提高,航摄效率得以提高。
2.3 航摄数据预处理
数据预处理的内容:
(1)对原始数据进行解压,获取GPS数据、IMU数据、原始激光测距数据等。
(2)将同一架次的POS数据、IMU数据、地面基站观测数据、飞行记录数据、基站控制点数据和激光测距数据等进行整理,获取的点云数据进行姿态校正、噪声点剔除、坐标转换等预处理,生成满足要求的点云成果数据。
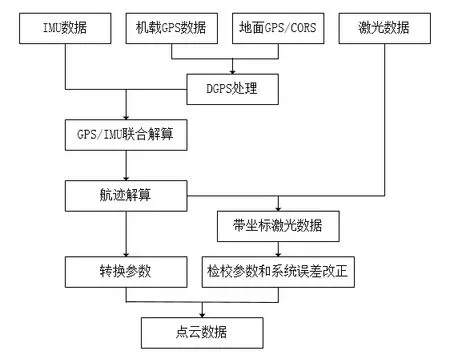
图3 点云数据处理流程图
2.4 点云分类
本次点云分类是基于地质资源规划设计调查而定的。点云分类是由原始激光数据经过解算,并对平面和高程进行校正后,进行精细分类,分别提取噪点、地面点、植被点和其他非植被点。
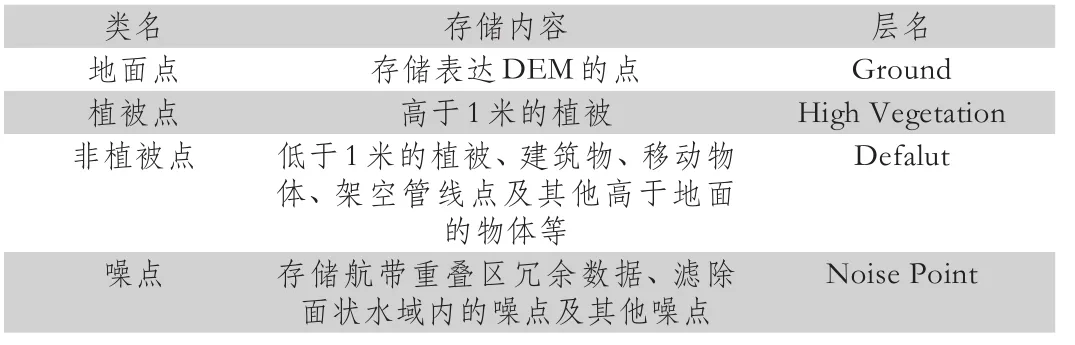
表2 点云分类层定义
2.5 数据成果
2.5.1 三维激光点云数据
激光点云数据不仅仅包含X、Y、Z坐标信息,还包括如反射强度等其它多种信息。根据具体需求,激光点云数据密度可达到100点/平方米以上,高密度的激光点云数据能精确反映地形地貌细节。
2.5.2 数字高程模型(DEM)
基于激光点云数据能够快速高质地生成高精度DEM成果,DEM高程可达到优于10cm精度。
2.5.3 数字表面模型(DSM)
DSM是用含有首次回波信息的激光数据拟合生成的地表模型,DSM模型对地表的房屋和树木有很好的表现,DSM反映了区域表面的高低起伏,DSM=DTM+非地形要素,由于LiDAR原始数据为三维点数据,因此生成DSM,需要进行插值算法。
3 单光子激光雷达航摄数据处理技术在地质资源规划设计中的应用
3.1 林区建设规划管理
林场建设管理中涉及到土 方量、横断面、通视分析、 光照分析等方面的需求, 通过机载激光雷达获取的 高精度数字高程模型、数字地表模型可以用于横断面的直接量测获取,还可 以用于林区瞭望塔通视分 析,土方量计算,光照分 析、分析地形的流域面积 以及汇水线,为防灾救灾 提供水流的汇集路线,针对性的进行治理等。
3.2 生成植被冠层数据CMH,获取森林参数
通过点云分类分出林下地形数据与林上数据利用分类后的林上点云数据构建DSM,林下地形点云数据构建DEM,CHM=DSM-DEM.从而获得林木高度,面积、林块冠层体积等森林参数信息,来提高基础测绘生产效率和减少外业工作量。机载激光雷达测量系统能同时获取树冠底部的地形信息以及树高信息,可分析植被并加以分类,计算树高、株数等信息。
3.3 Liar数据估测林分生物量和蓄积量
用Lidar数据估测林分生物量和蓄积量采用统计分析的方法建立回归模型进行估测模型参数有树高胸径和株数等。因此,对生物量和蕾积量参数的提取首先需要用 Lidar数据准确估测树高和胸径等参数。根据树木生长的相关规律树木的高度和胸径、蓄积量等存在着定的相关关系这种生物约束机制为利用激光雷达反演的高度信息进行森林生物量建模,结合当地光的相关生长方程而采用统计回归的方法,可以获得林分生物量和蓄积量。
3.4 森林防火演习和救灾
机载激光雷达测量系统获取准确的树高、树木密度等信息,进而建立起林区的三维场景,可以直观清晰的标出火灾位置、水源位置、火灾大小、蔓延方向、未来几个小时内需要撤退的村庄,调集消防人员和防火器材。因此机载激光测量成果其在森林防火中必将具有很好的应用前景[2]。
4 结语
单光子激光雷达技术的的优点是高密度、高精度的森林三维点云数据,直接获取高精度的林木和林下地形数据,改变以往先人力实地查勘和估算的作业手段。点云可以直接获取冠层高度、林下地形面积和表面积、截面的垂直分布,分割点云可以推算冠幅、冠层体积、大树的株数密度、通过生长方程估算胸高断面积、平均胸径、蓄积量、通过更新动态扫描可以获取地上生物量,林木生长量、砍伐、森林碳汇等重要的数据,有着广泛的应用前景,当前还存在一些针叶林和阔叶林的参数差异较大,分析软件不完善等问题,希望通过进一步的研究,技术的不断进步,前景也越来越好。
