面向电力场景作业机器人的目标检测方法研究
2021-08-06李晨曦娄根李慧姝方武
李晨曦,娄根,李慧姝,方武
(1.苏州经贸职业技术学院,信息技术学院,苏州215009;2.江苏省智能服务工程技术研究开发中心,苏州215009)
0 引言
国内外科研工作者对电力环境下物品检测进行了深入研究,提出了模糊均值方法、K最近邻方法以及支持向量机等传统图像识别方法。上述方法基于简单的人工特征,当电力环境变化时,识别准确率会大幅下降,算法鲁棒性不强。随着深度学习的兴起,国内外学者对深度卷积神经网络技术(Deep Convolutional Neu⁃ral Network,DCNN)在电力环境下物品检测方面开展了研究[1]。相对于传统方法,DCNN直接将图像作为输入,能够实现图像中目标特征的自动提取,避免了繁琐的人工操作,并对图像具有极强的表征能力[2],显著提高了电力环境下物品监测的有效性与实用性。
电力机器人对场景中各种目标进行自动检测是实现这些远程电力作业功能的首要条件。其中基于深度卷积神经网络的目标检测技术是近期最受关注的研究领域[3-6]。然而,现阶段视觉目标检测的研究方法和技术手段需要大量训练数据及复杂模型,存在数据标注成本太高、实时处理能力不强等问题。其主要原因在于:一是当前深度卷积神经网络预测模型[7]的高准确性是建立在大数据学习的基础上,需要大量的标注样本才能发挥作用,成本非常大;二是作业机器人等嵌入式作业机器人一般采用电池供电,能量和计算能力有限,无法实时运算复杂的神经网络模型。
人类之所以能够快速学习的关键是人类具备学会学习的能力,能够充分利用以往的知识经验来指导新任务的快速学习,称为小样本学习(Few Shot Learning)[8]。小样本学习使得我们可以通过较少的样本快速持续地学习各种各样的任务,已经成为增强学习之后深度学习一个重要的研究方向。将基于深度学习的小样本目标检测方法应用于电力场景作业机器人系统属于比较新的研究方向,至今在这方面的研究成果不多。
1 研究进展
近年来,随着深度学习技术的发展,目标检测算法从基于手工特征的传统方法转向了基于深度神经网络的方法,例如2013年提出的R-CNN[8]以及近年来Fast/Faster R-CNN[9]、YOLO系列[10-11]、SSD系列[12-15]、Pelee[16]等这些基于深度学习的目标检测技术。这些基于深度学习的主流算法模型分为One-Stage目标检测算法和Two-Stage目标检测算法。其中,YOLO、SSD等典型One-Stage目标检测算法不需要候选区域阶段,可以通过一步直接产生物体的类别概率和位置坐标值。Two-Stage目标检测算法将检测问题划分为两个阶段,第一个阶段首先产生候选区域,包含目标大概的位置信息,然后第二个阶段对候选区域进行分类和位置精确修改。
在电力场景下,由于光线变化导致传统算法识别率较低。为切实降低目标检测所需数据的获取及标注成本,提升检测准确率,我们提出建立面向电力场景作业机器人的小样本目标检测体系,结构如图1所示。

图1 基于小样本学习技术的电力场景目标检测框图
具体研究方法如下:
(1)首先对机器人采集的图像进行预处理,采用特征工程确定目标候选区域,减少数据处理量,研究精简化的卷积神经网络模型。
(2)综合考虑计算复杂度、存储需求,采用适于电力作业机器人的小样本目标检测算法。图2给出了工作原理。
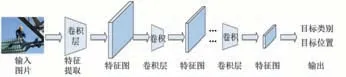
图2 小样本目标检测算法流程图
2 目标检测算法
2.1 目标检测
目标检测是机器视觉领域的核心问题之一,其任务是找出图像或视频中的感兴趣物体,同时检测出它们的位置和大小。本文采用16层深度卷积神经网络,
首先对输入图像进行预处理,将图像分成13×13块,然后利用训练好的卷积神经网络,在预测框回归输出物品的类别和位置。具体方法如图2所示,首先获取样本图像,然后对样本图像进行数据增强处理扩充数据集;对数据集标注,得训练样本集;对样本图像进行缩放,得子图像;构建十六层卷积神经网络模型M;采用通用物品检测数据库对十六层卷积神经网络模型M进行预训练,得预检测模型;在预训练后对检测模型进行二次训练,得最终的目标检测模型。二次训练的数据为采集和进行数据增强后的训练样本集;最后对子图像处理得目标框,利用目标框对目标检测模型进行测试。依据电力环境下物品图像的特点,进一步优化卷积神经网络的结构与参数,建立一种精简的物品识别模型,实现电力环境下物品的有效识别。
2.2 数据集
首先采用通用开源数据库进行深度卷积神经网络模型的预训练。通过网络爬虫采集图像3000幅,并采集各种电力场景下图像12000幅。为了扩大图像训练数据集,更好地提取各种条件下物品特征,训练时避免出现过拟合,如图3所示,我们对采集的数据集进行一些经典数据增强处理,具体包括图像亮度、色度、对比度、锐度以及人工加噪声等多种处理。通过数据增强后,图像数据集扩充到4万张。将图像分辨率缩小为512×512像素,然后对图像中目标进行人工标注。图像标注后,随机选取不同环境条件下的6000幅图像作为测试集,其余34000幅图像用于模型训练。
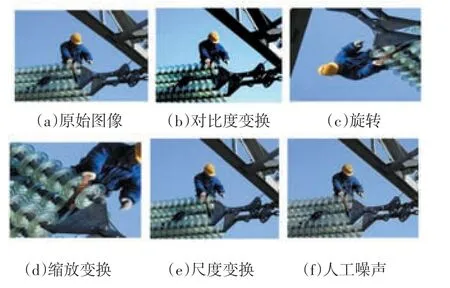
图3 图像的数据增强
3 基于DCNN的物品识别技术
3.1 模型
从不同电力环境下采集的图像中实时目标检测是一项具有挑战的任务。深度卷积神经网络对目标特征具有很好的自学习能力,可用目标的有效识别。我们采用基于区域的DCNN,在卷积层后接入感兴趣区域池化层,然后接入全连接层。本文采用的深度卷积神经网络结构参数如表1所示。

表1 卷积网络结构参数表
算法模型如式(1)所示。

其中,x为输入图像,y为物品分类以及其位置坐标,M为卷积神经网络模型。网络由卷积网络层和最大值池化层组成。卷积网络用于提取图像的特征,最大值池化用于选择重要特征,最后使用训练好的模型M对图像中物品进行检测识别。
3.2 损失函数
模型训练采用的损失函数如式(2)所示。
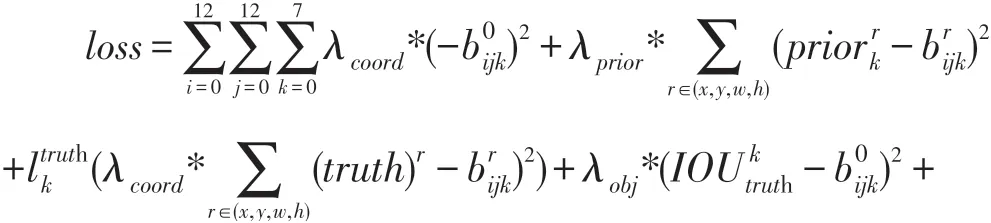

其中λnoobjλpriorλcoordλobjλclass为不同类型的损失函数的权重。noobj是指矩形框里没有目标,obj是指矩形框里有目标,coord是指矩形框坐标,class目标种类,这里为12种目标,IOU是指叠加区域。
4 实验
采用TensorFlow 2.0等平台以及标准开源库对本文算法性能进行分析实验。根据试验结果,调整参数重复实验。在不同条件下检验算法的实际效果,并根据实测结果对算法进行分析以及优化。采用手动调参实现信息的有效处理,当达到精度要求时终止训练过程。系统平台参数如表2所示。

表2 PC系统测试平台参数
本文算法与YOLO、SSD和Faster R-CNN算法准确率以及速度如表3所示。通过对不同尺寸图像检测实验结果证明本文算法在512×512分辨率下准确率方面达到85mAp,优于YOLO和SSD算法,平均提升了8%,略低于目前准确率最高的Faster R-CNN算法。

表3 不同算法准确率比较
5 结语
为解决电网人员生命安全与高强度作业问题,降低工作人员的事故率,针对现阶段识别检测算法存在准确率低、鲁棒性不强等问题,本文提出了一种小样本目标检测方法研究。实验证明相对于传统方法,本文方法在保证速度的前提下,可提升8%的准确率,能对不同环境下物品的进行有效识别。下阶段工作是将算法部署到作业机器人上进一步实测并完善。
