基于地平坐标系的太阳能追日系统高度角—方位角双轴跟踪系统的应用研究
2021-08-04林臻智曾奕珂
金 旭,林臻智,曾奕珂
(南华大学 电气工程学院,湖南 衡阳 421001)
在工业化时代持续发展和逐步形成的影响下,人类社会发生了巨大的变革,同时在这方面取得了诸多成就,但同时也造成了巨大的能量消耗。伴随着社会的持续快速发展,人类对能源的依赖性也与日俱增[1]。为了保证人类实现持续进步、发展,寻求新型能源是现阶段亟待解决的问题。太阳能在现阶段人们开发利用所有新型能源中利用时间最长、最为清洁且开发前景最广阔。但关于太阳能的利用效率实际上并不高,只有不到30%,尽管地球表面所接收到的辐射总量非常大,但其同时也表现出明显的太阳光分散问题,并且极易受到季节、时间、海拔、天气等各方面因素的干扰[2-3]。为此,结合一天中不同时刻太阳所表现出的较为突出的方位变化问题,对太阳轨迹实施定位跟踪,并结合轨迹变化情况进行角度的调整,保证太阳能电池板与入射光线角度能够始终保持在90°左右,保证太阳辐射能量得到更好的运用[4-6]。太阳能追日系统的研究成为了探讨热点。目前,所开发研究的各种追日装置中,机械控制方法非常多,主要是借助电控方式或者压差式来达到较好的太阳光照跟踪目的,可以较好地实现对太阳能的收集转化[7-8],促使太阳能跟踪效率迅速提升,但这些装置实际上还存在诸多缺陷,适用性不强。为此,本文研究的主要目的是设计一种有效且具有较高稳定性的太阳能追日系统,更好地对太阳光照进行实时跟踪,这就能够帮助太阳能电池组件得到更好的光电转换。
1 太阳能追日系统跟踪方案设计
太阳能在实现追日期间,主要通过对太阳的运动轨迹进行全面掌握,并保证太阳光线能够垂直照射在电池板上,即当主光轴的光线表现出倾斜特点时,即可实现对系统工作的控制。这就能够经由指令控制执行器来对其做好相对应的太阳电池板的调整处理,从而达到最理想的平行效果。
1.1 太阳能跟踪方式的选择
双轴跟踪追日系统在设计的过程中,主要是采用2个不同的旋转轴,保证太阳可以达到相对应的轨迹高度角,并通过方位角来落实相对应的双向跟踪,有着非常强的合理调整功能。同时,其自身的跟踪精度也可以实现对单轴跟踪方式的全面提升,从而获取更多的太阳能辐射。而太阳能追日系统高度角—方位角双轴跟踪系统主要通过地平坐标系来做好相对应的设计处理,2根旋转轴可以保持相互垂直[9]。在工作过程中,追日系统主要是在太阳光线高度角、方位角变化的基础上,通过程序来实现对太阳能电池板的控制,从而达到赤道轴和水平轴运动,促使太阳光线与电池板之间可以达到较高一致性。这种跟踪方式具备了相对较为稳定的干预效果,且具有较高的太阳能利用率[10]。
1.2 太阳运动轨迹计算
视日运动轨迹在实施跟踪设计期间,首先需要将控制器MCU直接与太阳运动轨迹做好相对应的计算处理,当系统输入相应的位置信息以及时间信息之后,控制器也能够较好地帮助信息实现快速计算输入,以便掌握不同时刻状态下的运动轨迹变化[11]。在确定太阳方位角、高度角信息后,控制器MCU可以经由直流电机来做好太阳位置的跟踪和驱动操作。为此,结合时间信息与地理位置来进行太阳运动轨迹的计算,这是保证太阳能够更好实现追日系统设计处理的关键要点。
1.2.1 太阳方位角γs
太阳方位角主要是指追日系统能够在太阳中心连线与太阳能电池板的地平面上形成正南方向和投影位置的夹角,其具体的计算公式为:
(1)
1.2.2 太阳高度角αs
太阳高度角主要是指太阳能电池板与太阳中心的连线以及地平线所形成的夹角,计算公式为:
sinαs=sinδsinφ+cosδcosφcosω
(2)
式中,φ为当地的地理纬度;δ为太阳赤纬角;ω为在特定时刻太阳时角,以角度来进行时间的表示,上午即为正,下午即为负。正午时刻的时角ω=0,此后时角每小时会相应的增加15°,具体的计算公式为:
(3)
1.2.3 太阳时角ω与太阳赤纬角δ的计算
(1)太阳时角ω。太阳时角主要是指太阳每小时所运动的角度,这与时间密切相关,太阳运动速度在持续不断的改变,这就使得真太阳时及其角度能够表现出非常突出的不均匀性特征。而在处于平太阳状态下,则属于人们日常说的时间概念,同时它也是基于太阳均速运动假设层面,这就能够与真太阳之间保持着相对较为突出的时差特性[12]。
必须确保太阳的运动轨迹能够得到最大程度、最精确的跟踪处理,同时在程序跟踪设计期间,需要为其提供相应的真太阳时[13]。真太阳时与平太阳时之间的时差均可以通过定时标准来实施相应的校正处理,我国区域真太阳时确定方法如下:

(4)
式中,Lloc主要用于对观测位置的地理经度进行表示;时差则主要通过时差表来作出相应的查询信息获取,年际之间所表现出的误差通常情况下并不大,可以直接忽略。
(2)太阳赤纬角δ。太阳赤纬角可以被视为日地中心与赤道面连线之间所形成的一个夹角[14]。为此,太阳赤纬角每时每刻均有着明显的差异。
(5)
在春季与秋季正午时分,太阳能够直接照射在赤道上方,这个过程中赤道赤纬角可以保持为0;在北半球的夏季到正午时刻,太阳直射能够直射到北回归线上,这个时候赤纬角δ=23.45°,而处于冬至正午时刻的情况下,太阳会转换到南回归线,此时赤纬角δ=-23.45°。
2 太阳能追日系统结构设计与分析
太阳能追日系统往往包含了支撑底座、2个水平轴等,其中驱动电机1主要用于对传动齿轮副实施相应的控制,从而加强竖直轴的回转运动处理,通过对电池板水平轴方向进行控制,即可实现达到太阳方位角度的跟踪处理;驱动电机2则主要针对2个水平轴在上俯仰运动的过程来加强操作控制,同时可以基于赤道轴的方向上做好相对应的太阳高度角的跟踪[15]。
太阳能追日系统主要是经由太阳升起时刻来实现正常运转,通过对电池板朝向的合理调整,即可实现对太阳运动轨迹的跟踪。在进行日落处理后,追日系统可以逐步恢复到日出的位置上,并能够在这个过程中重复完成下轮的跟踪。双轴跟踪系统如图1所示。
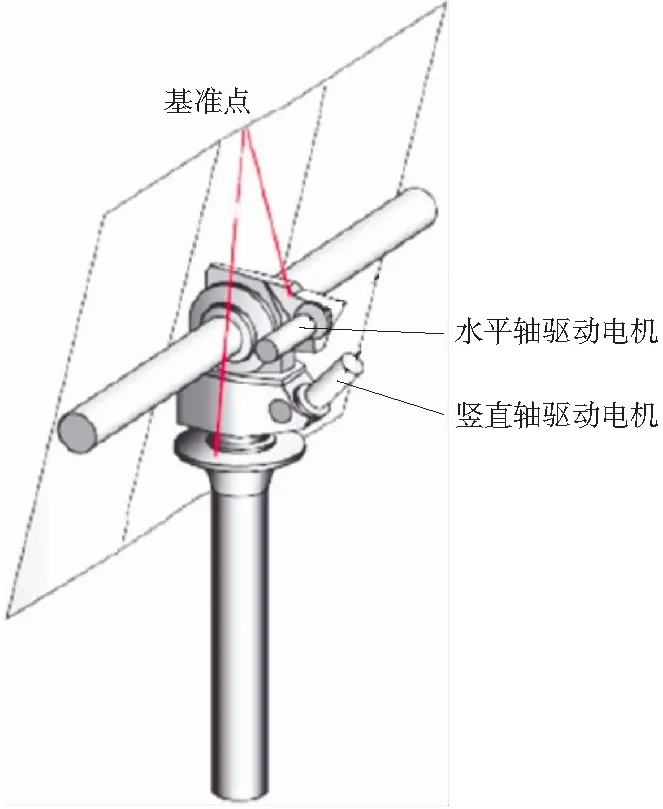
图1 双轴跟踪系统示意
2.1 太阳能追日系统结构设计
针对太阳能追日系统机械结构做出相对应的设计操作期间,首先必须全面了解太阳能电池板的相关参数情况。太阳能电池板参数:最大功率290 W;组件尺寸1 955 mm×991 mm×50 mm;质量26 kg;工作电压34.930 V;工作电流8.306 A。
托架结构的设计与电池板数量、质量之间均密切相关,研究所提出的太阳追日系统在进行安装操作过程中,主要设计了2块相同尺寸的太阳能电池板,具体尺寸为1 956 mm×992 mm×50 mm。在对太阳能电池板托架选材以及结构设计期间,因受到承托力的影响,研究以30 m/s的风速来进行承托力的计算,结合经验公式获得该支架的风压承托力q为600 N/m2。
为了确保追日系统工作具有较高的稳定性,太阳能电池板托架必须有较大的刚度和强度。综合各方面考量,最终采用厚度为50 mm的电池板托架,其托架主要运用等边角钢来作为材料。
2.2 追日系统传动机构设计
根据系统传统机构设计特点,为了更好地提升传动准确性,增强大扭转传动能力、传动比和较快的调节速度,即可较好地实现对追日系统传动机构的合理设计,从而选择与普通齿轮传动与涡轮蜗杆传动的二级传动方案(图2、图3)。

图2 双轴跟踪装置示意
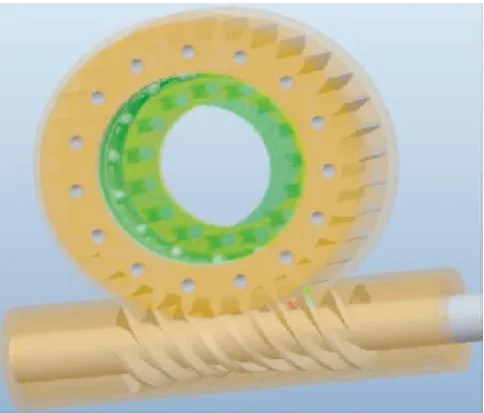
图3 涡轮蜗杆减速机示意
在设计过程中,追日系统能够与高度角传动机构、方位角传动机组成一体,这主要是借助直流机、减速机共同组合而成。方位角的传动机构、跟踪系统高度角的机构如图4所示。在针对传动机构设计处理期间,主要采取了大减速比装置来实现对其整体驱动力的承载力进行提升,同时还可确保追日系统能够达到最低启动和跟踪精度效果。
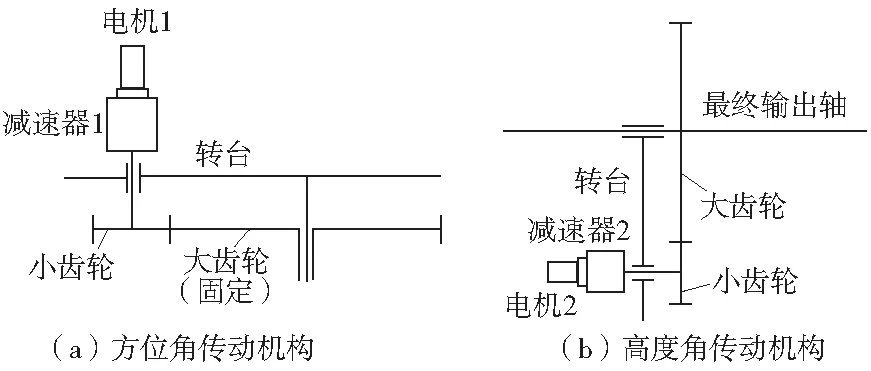
图4 双轴跟踪系统传动机构
水平轴与竖直轴均是借助2个不同的驱动电机来做出相对应的控制操作,根据图4(a),方位角、大齿轮均能够与小齿轮之间形成有效嵌合,减速器1输出轴与小齿轮相互连接,当驱动电机1在对减速器1进行驱动运行期间,小齿轮必然能够绕着大齿轮实现行星转动,同时还可以配合转台绕着竖直轴来实现对应的回转活动处理,确保其能够更好的完成太阳方位角跟踪操作。根据图4(b),这就意味着其本身有着较为突出的高度传动关系,驱动电机2能够帮助减速器2得到更好的运转,减速器2则能够与小齿轮相互连接,电机2在工作过程中,必将经由小齿轮携带大齿轮能够绕水平轴做好相对应的俯仰活动,这最大限度保证太阳高度角的跟踪处理。
2.3 太阳能追日系统三维建模与静力分析
结合暖温带地区的地理以及环境条件,当太阳能电池板在进行直射的过程中,配合相对应的轨迹跟踪即可实现对光电转化效率的全面提升,同时还具有高角度自动调节、方位角度等环境自适应功能[16-17]。在遭遇到极限条件时,其最大应力值与结构形变量均是研究设计非常重要的内容和要点。研究在分析期间,可以配合ANSYS分析软件来做好相关静力处理。
根据相关数据表明,在极端恶劣的环境下,追日系统的最大变形量为1.298 mm,主要出现在太阳能电池板支架边缘部位,其所能够承受的最大应变和最大应力值均处在竖直立柱上方,且结构在能够承载的范围内。
暖温带地区由于受到季风水平的影响,需要保证其承载30 m/s风速、11级风力的影响,追日系统结构件所承担的最大风力W=3.780 kN。太阳能电池板所承载的积雪载荷为1.323 kN,而固定载荷为1.600 kN。针对太阳能追日系统高度角—方位角双轴跟踪系统对雪载、风力情况的变形情况做出相应考虑,即可实现对应力分布以及应变情况的计算处理(图5、图6、图7)。
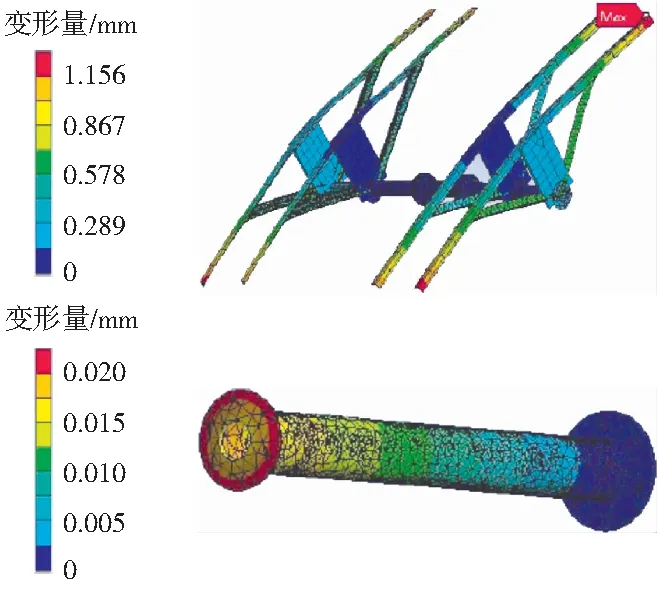
图5 太阳能追日系统变形结果
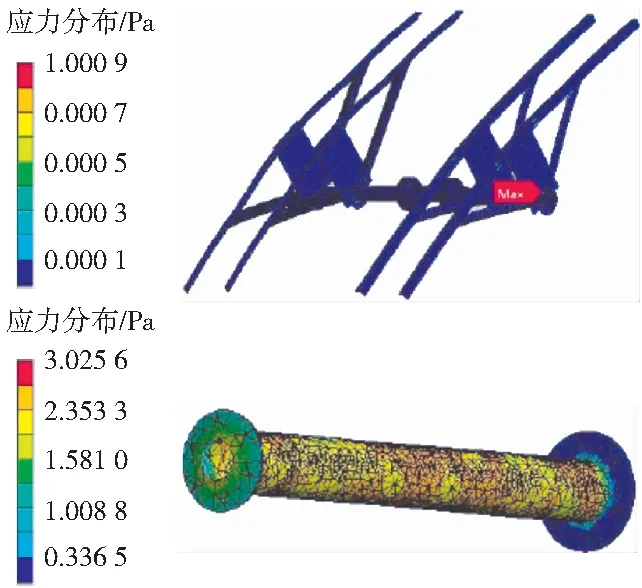
图6 太阳能追日系统应力分布结果
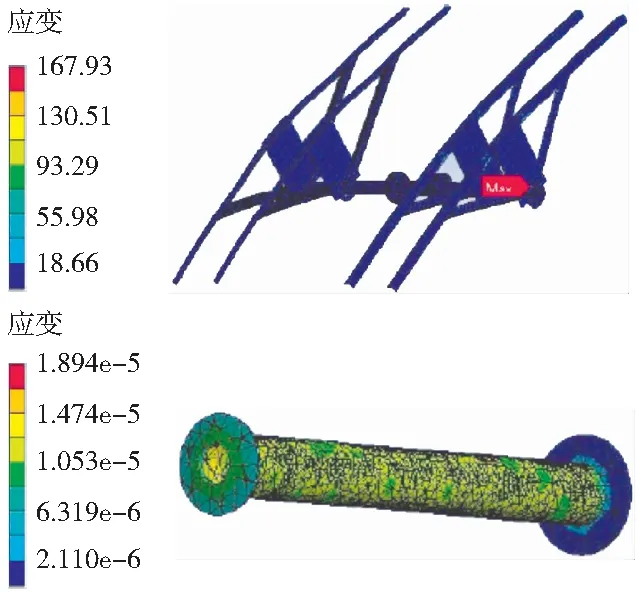
图7 太阳能追日系统应变结果
2.4 系统能耗计算
为了最大限度地确保系统处于正常运转的情况下,设计的追日系统能耗均是将大于正常值作为主要内容。其中,太阳能追日系统主要结合每日12 h来做出相对应的计算处理,其功率为30 W;而每日需要对水平轴与竖直轴做出120次的调整处理,同时还需要进行5 s的跟踪调整操作,此时太阳能追日系统的日平均能耗大约为0.42 W,系统的能耗程度相对较低。
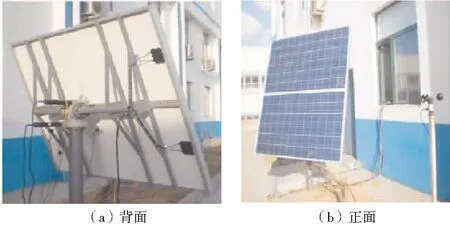
图8 太阳能追日系统实物
3 追日系统控制系统设计
研究主要将闭环控制系统作为太阳能追日系统,其主要是基于太阳理论基础上,借助传感器反馈信息来帮助太阳理论位置得到更好的修正,从而帮助其更准确地实现追日效果,促使控制系统的精度得到最大程度上的提升;视日运动轨迹跟踪法具有更好的实用价值,以防因天气变化短时间变化或者云层遮蔽而导致太阳能追日系统受到影响[18-19]。追日系统的控制原理如图9所示。
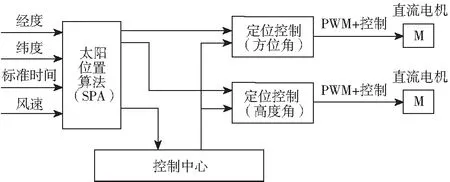
图9 追日系统的控制原理
3.1 核心部件设计
3.1.1 MCU控制器
MCU控制器,又可称之为单片机,这是太阳能追日系统控制系统中的核心部件[20]。主要采用STM32F407ZGT6型单片机进行系统的控制处理,具有成本较低、自主设计等特性,能够满足太阳能逐日系统的安全要求和性能要求,这不仅能够实现对太阳能追日系统的独立控制,还能够应用于大型太阳能电池板阵列的追日系统控制。
STM32F407ZGT6型单片机参数:核心为ARM Cortex M4;数据总线宽度32 bit;工作温度-40~85 ℃;数据RAM大小192 KB;数据 RAM类型SRAM;ADC分辨率12 bit;ADC通道数量24;DAC分辨率12 bit;工作电源电压1.8~3.6 V;程序存储器大小1 024 KB;接口类型CAN,I2C,SDIO,I2S/SPI,UART/USART,USB;输入/输出端数量114I/O。
3.1.2 风速传感器
研究主要采用风速传感器(RY-FS01型),它主要是基于先进的电路模块技术来完成变送器开发,这就能够实现对环境风量的准确测量,同时标准的脉冲输出信号也方便运用。
在高风速条件下为了更好地确保太阳能追日系统不会遭受到破坏,控制系统可相应地增加风速传感器模块,从而实现对高风速响应中断程序的配置。风速传感器有着较强的风速传感器,这就能够实现对多个太阳能电池板方阵的群控,可以在恶劣的条件下正常使用。
研究所设置的高风速响应中断程序即便是在风力达到了30 m/s速度下,仍然能够自动向MCU控制器进行脉冲信号的输出,同时将中断程序启动,太阳能追日系统即可停止自动跟踪程序。同时,控制器还能够对高度角驱动电机驱动太阳能电池板放平,从而有效减缓风力的冲击。风速在下降到安全范围之后5 min时间内,追日系统就能够自动进行追日跟踪模式的恢复。
3.1.3 触摸屏
在触摸屏中刷入下位机软件来进行相应的程序控制,同时与控制器之间借助局域以太网信号来完成通信操作,借助触摸屏就能够达到对追日系统运行状态的有效控制,且通过手动的方式来实现对追日系统相关参数的合理控制。
3.1.4 定位模块
将GPS定位模块搭载到MCU控制器上,这就能够促使其纬度、经度的地理信息定位准确性得到更好的实现。
3.2 系统控制连接
针对双轴太阳能追日系统在实施控制操作期间,在将电源成功接通之后,GPS定位模块可以将经纬度等位置信息及时反馈给MCU控制器,MCU控制器预先放置了太阳轨迹计算程序。同时,结合时间信息和经纬度信息计算出当前太阳的方位角与高度角,并借助相应的高度角、方位角的2个电机来实现对追日系统的驱动,确保其能够绕水平轴进行俯仰运动以及绕竖直轴进行旋转运动,以便到达相应位置。
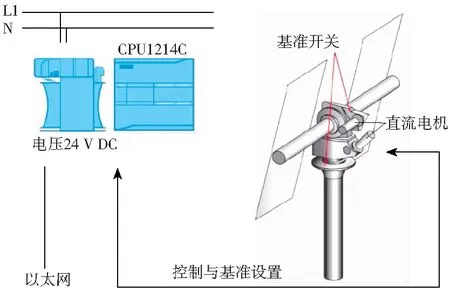
图10 硬件连接控制连接示意
4 太阳能追日系统发电效率对比实验
研究所设计的太阳能电池板群控太阳能追日系统最主要的目标是在保证太阳能追日系统发电效率的基础上,将EthereCAT总线来引入到太阳能追日系统中,从而达到对太阳能追日系统的群控操作。通过对基于地平坐标系太阳能追日系统高度角—方位角双轴跟踪系统的控制,即可实现对其发电效率的提升,使其效率达到30%。
实验研究方法:为了确保实验的可靠性与准确性,本研究主要运用了2组不同的技术方式来进行太阳能发电实验,即固定安装与本次设计追日系统。在相同的条件下,从8:00到15:00进行实验操作,共连续采集9 h,当天天气预报显示气温在3~17 ℃,9:00—10:00显示为多云天气,其他的时间段均为晴天。
在实验操作的过程中,总共对37组数据进行了记录,所记录的太阳能电池板固定安装发电装置以及群控追日系统功率结果见表1。根据表1,追日装置在固定时间段内,其输出功率提升到了30%以上,实现了对太阳能资源利用率的全面提升。
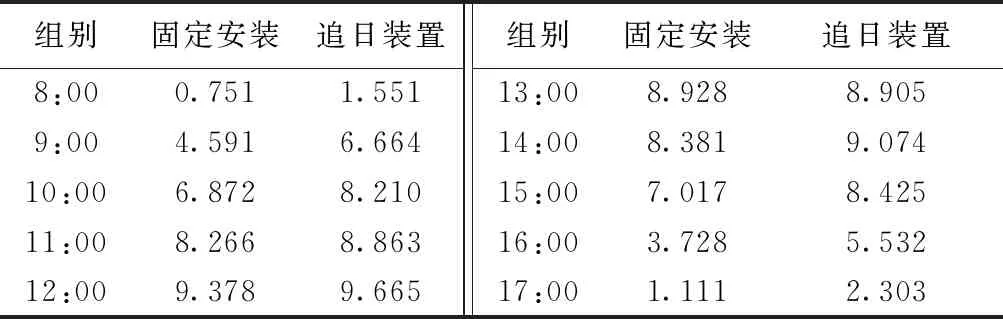
表1 输出功率数据对比
5 结论
综上所述,能源作为国家经济繁荣与社会进步的重要基础,能够直接影响人类未来发展方向。就现阶段的发展情况来看,人类所能够开发与利用的能源主要有石油、煤炭、天然气等不能重复利用、不可持续的化石能源。但对能源实施开采处理的过程中,尽管给人类社会带来持续繁荣的经济效益,但同时也会造成了较大的隐患,长此以往,势必会引起较为严重的能源问题。为此,探索太阳能的利用成为了能源研究的主要课题。而基于地平坐标系来构建起相应的太阳能追日系统高度角—方位角双轴跟踪系统,可实现对发电效率的全方位提升。
