碳纤维“骨架”柔性电热驱动器的制备及其自形变性能
2021-08-04张晓慧杜鲜晶田明伟曲丽君
张晓慧,杜鲜晶,田明伟,2,曲丽君,2
(1.青岛大学 纺织服装学院,山东 青岛 266071;2.省部共建生物多糖纤维成形及生态纺织国家重点实验室,山东 青岛 266071)
在外界刺激下可以发生形状、体积的可逆改变或机械运动的柔性驱动器[1-3]在生物应用[4]、软机器人[5-6]、人工肌肉[7-8]、人机交互[9-10]等领域具有巨大的应用潜力。外界刺激包括电、光、湿度、磁力、溶剂等,其中电驱动具有可控、轻质、无需电极、操作简易、环境适应性强的优势[11],受到了广泛的关注。目前尽管在电刺激响应领域已经取得了很大成就,但电热驱动器普遍还存在变形幅度小、驱动力不足的问题,极大地限制了其实际应用。为了提高驱动性能,Jing等[12]经连续过滤制备了碳纳米管/氧化石墨烯双层驱动器,驱动器在1 V电压下可弯曲230°~250°,2 V电压下驱动时间缩短至0.4 s,将驱动器嵌入面料和衬里中制得可调身体温湿度的智能服装。Ahn等[13]将银纳米线与碳纳米管分散液涂覆在多孔织物基材表面,可实现机械互锁以及驱动器多层之间的化学键合,显著提高了机械耐久性,通过制造仿生自行走机器人和物体提升软机器人,成功地证明了所提出的驱动器的实用性。
石墨烯是一种具有完美sp2杂化键的二维碳材料,具有极高的电子迁移率、巨大的比表面积、优异的机械强度和柔韧性[14-16]。基于其优异的物理性能,石墨烯及其衍生物通常作为活性层与其他功能材料结合,形成不对称双层结构[14],构成柔性驱动器。石墨烯材料能够改善活性层的导电性、导热性和机械强度,提高驱动器整体驱动性能[17]。Chang等[18]通过简单地复合石墨烯和聚丙烯制备了可响应光和电的双晶片驱动器,具有大且可逆的变形(角度变化> 100°),快速响应(≈8 s)和低驱动电压(≤7 V),用于构造具有智能机械输出的多种仿生设备。Wang等[19]通过将银颗粒加入还原氧化石墨烯中,并与聚酰亚胺复合,制备了双层驱动器。银颗粒有效地降低了电阻,提高了驱动性能。
为了提高驱动器的性能,本文将高强高模量的碳纤维(CF)[20-21]作为“骨架”材料添加入石墨烯/聚酰亚胺(G/PI)双层膜中,制备了三明治结构的电热驱动器。碳纤维“骨架”使得电阻降低,增强了机械性和导电导热性,在输入电压6 V下,驱动器可提供109°的大弯曲角和7.25 mN(其质量的10.3倍)的输出力。基于上述性能,制备了自爬行机器人,证明了驱动器可用于柔性机器人领域中。
1 实 验
1.1 实验材料与设备
实验材料:碳纤维(长丝束,比电阻为0.02(Ω·g)/cm2,单纤维直径7.5 μm,深圳特力化纤股份有限公司),石墨烯浆料(固含量为5%,片层平均厚度2.4 nm,片层尺寸5~15 μm,宁波墨西科技有限公司),耐高温聚酰亚胺(面密度86 g/m2,厚度50 μm,3 M中国有限公司)。
实验仪器:ZEISS EVO18扫描电子显微镜(德国卡尔蔡司集团),A645sc红外热像仪(美国FLIR公司),4200A-SCS参数分析仪(美国Keithley公司),KXN-305D直流电源(深圳市兆信电子仪器有限公司)。
1.2 电热驱动器的制备
碳纤维“骨架”柔性电热驱动器的制备过程如图1(a)所示。首先,碳纤维均匀平行地铺放在硅片上,PI薄膜黏附并施加压力使二者充分黏合,得到CF/PI双层复合膜,其中PI长度方向与纤维轴向平行,黏附的碳纤维含量0.84~1.01 mg/cm2。然后,在复合膜贴附碳纤维的一面上通过电喷涂的方法层层涂覆石墨烯并在室温下干燥。其中石墨烯溶液(1 g/L)经超声分散后使用,喷枪使用参数设置[2]如下:喷涂压力设为0.5 MPa,液体流量为0.5 mL/cm2,每次喷涂时间为5 s。涂覆石墨烯使其达到一定的厚度,得到G-CF/PI三明治结构驱动器,在一定的电压作用下,会产生可逆的弯曲,弯曲示意图如图1(c)所示。将驱动材料剪成所需的“U”形,即得G-CF/PI电热驱动器,当接通6 V的电压后,实际的弯曲角度如图1(b)所示,并在断掉电源之后,恢复到原来的状态。

图1 电热驱动器
2 实验结果与讨论
2.1 电热驱动器形貌特征
图2为柔性电热驱动器的扫描电子显微镜图像。横截面图像(图2(a)(b))中,碳纤维分布在中间层,上层是层层堆叠的石墨烯,下层是聚酰亚胺薄膜,表明石墨烯较均匀地堆叠在CF/PI表面,且碳纤维紧密均匀地分散在石墨烯和PI薄膜之间,构成明显的三明治结构,碳纤维的介入为三明治结构提供了有力的支撑,为驱动器机械性能和导电导热性的增强提供了可能。从表面形态图中(图2(c))可以看出PI表面光滑紧密,石墨烯表面(图2(d))粗糙,呈现褶皱状,碳纤维两侧不同的表面形态有利于驱动器的弯曲角度的增加。
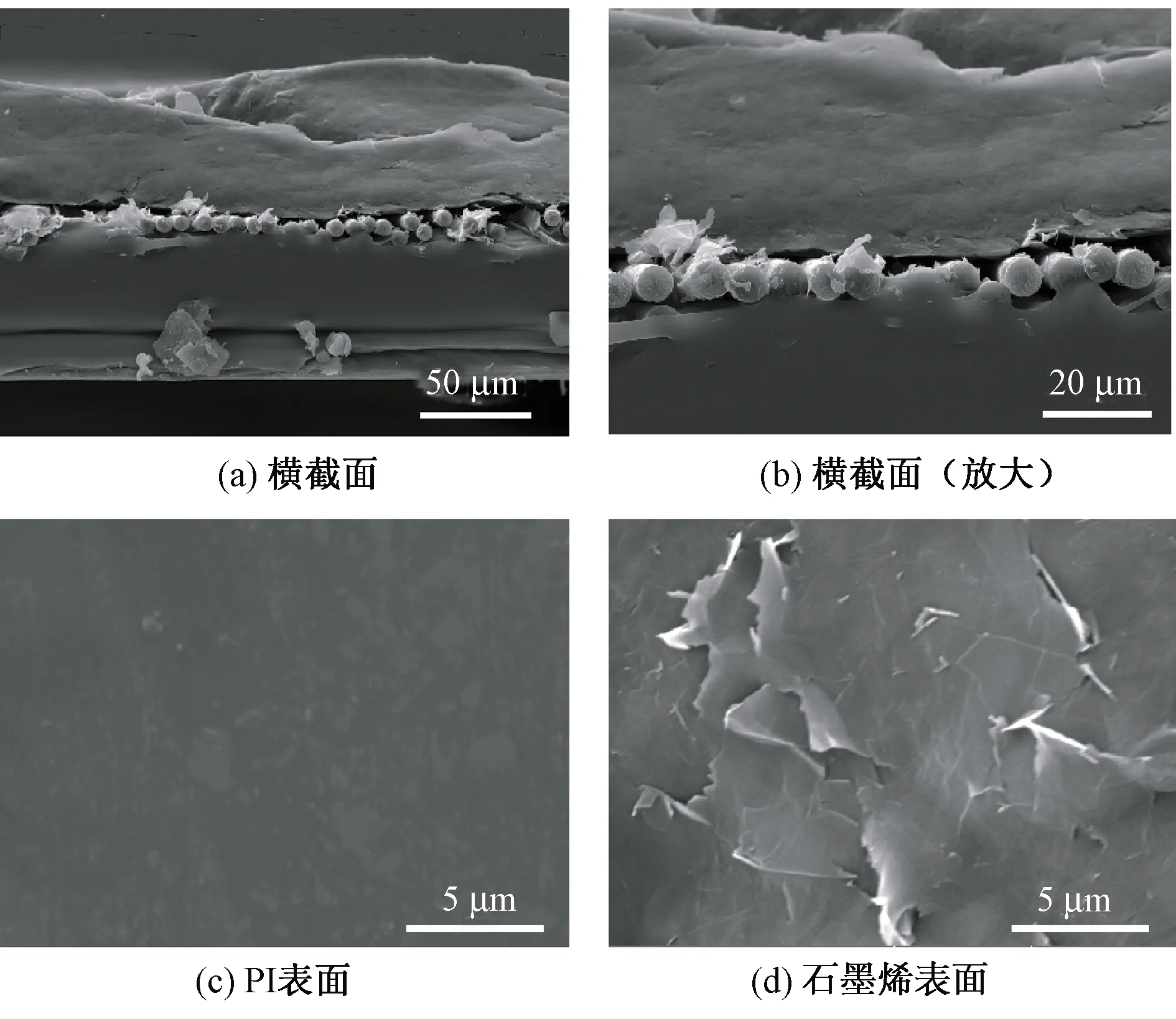
图2 电热驱动器SEM图像
2.2 驱动器电热性能
碳纤维“骨架”柔性电热驱动器的弯曲变形是基于导电层的电热转换能力和各层材料热膨胀系数(CTE)的不同从而导致在通电过程中产生了不均匀应力。当施加电压时,石墨烯和碳纤维可以通过焦耳热效应将电流转换为热能并传递到PI层。PI层和导电层之间存在很大的热膨胀系数差异:PI的CTE为正值且较高[22],石墨烯的CTE为负值且较低[23],碳纤维在轴向方向上具有较小的负值CTE[24]。随着温度的升高,PI分子链被激活并扩展,在宏观上表现为体积膨胀[2]。与此同时,石墨烯和碳纤维由于较低的CTE,在宏观上均表现出热稳定性,导致驱动器向石墨烯侧弯曲。当电源关闭时,随着温度下降,驱动器恢复初始状态。
为探究石墨烯的涂覆量对自形变性能的影响,分别制备了4组具有不同石墨烯厚度的驱动器。石墨烯厚度分别为15、30、45、60 μm。由图3(a)可知,驱动器的方阻随着石墨烯层厚度的增加而逐渐降低。电热测试中,施加电压,驱动器的温度在10 s内快速上升并达到稳态温度,断开电压,温度快速下降,表明了快速的热响应。电压越大,驱动器的温度越高(图3(b))。由于电阻最小,石墨烯层最厚的驱动器(60 μm)达到的温度最高,呈现了最好的电热转换能力。
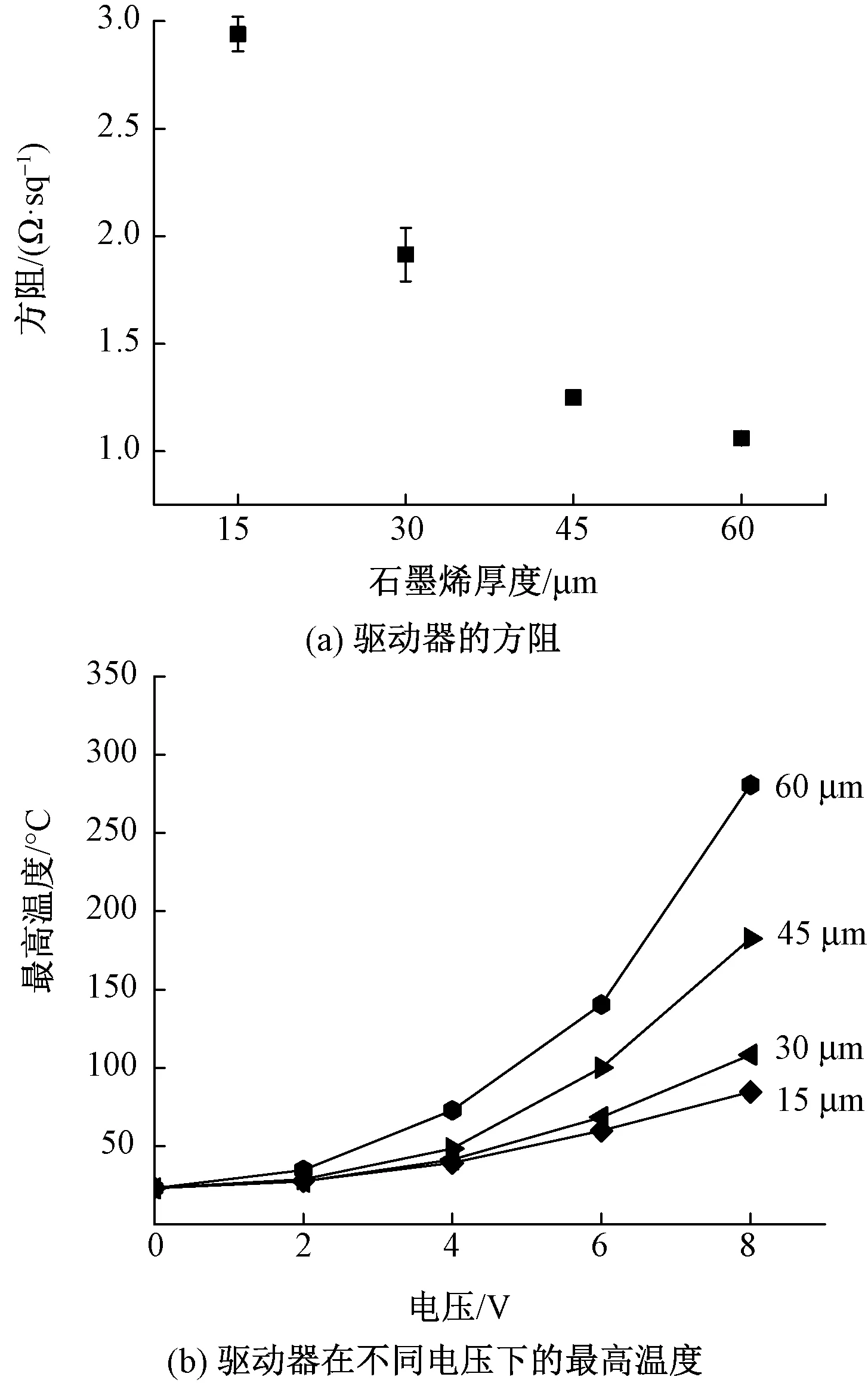
图3 电热驱动器的电热性能
2.3 电热驱动器自形变性能
施加电压后,驱动器在石墨烯层发生弯曲变形。不同的电压下,驱动器的自形变不同。图4给出了电热驱动器在不同电压下的弯曲角数据。在低电压(≤ 8 V)下,驱动器具有大的弯曲变形,体现了优异的自形变性能。由图可知,电热驱动器的弯曲变形随着施加电压和涂覆石墨烯厚度的增加而增大。
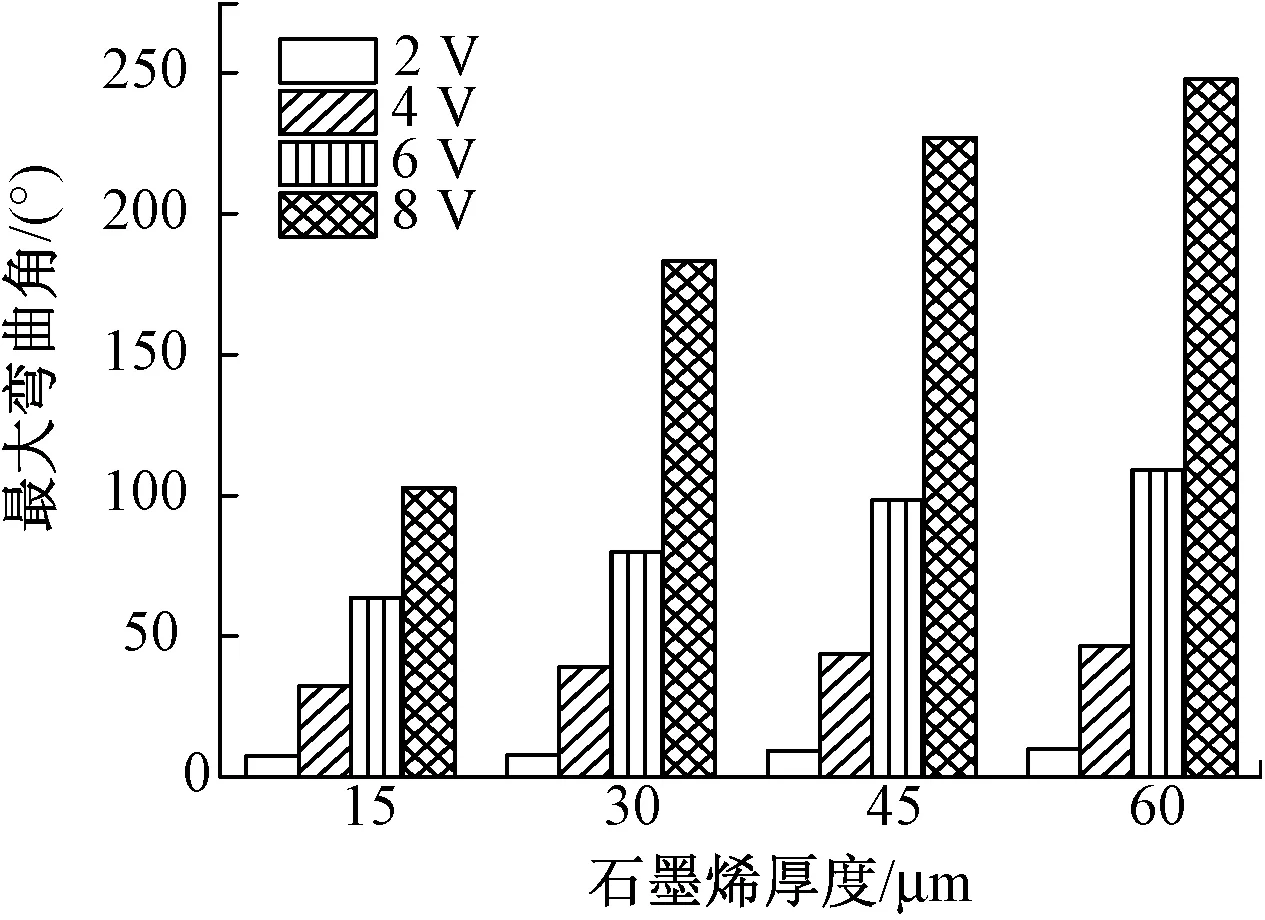
图4 电热驱动器在不同电压下的最大弯曲角
对于驱动器的应用,驱动力是一项重要指标。碳纤维的加入明显增强了驱动器产生的驱动力。相同条件下,测得4组驱动器在6 V电压下的驱动力分别为5.78、6.47、6.90、7.25 mN。其中石墨烯层最厚驱动器的驱动力是其质量的10.3倍,而在同一电压下,弯曲角的角度最大,为109°,是性能最优驱动器。
图5示出了制备的碳纤维“骨架”驱动器与先前报道的驱动性能(包括驱动电压、最大弯曲角和驱动力)比较[22,25]。可以看出,碳纤维“骨架”致动器在较低的驱动电压下具有较大的弯曲变形和较大的驱动力[26-28]。
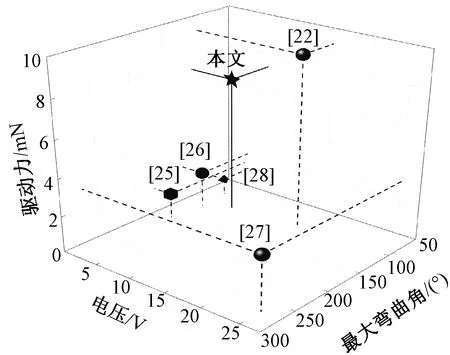
图5 “骨架”驱动器与先前报道的性能对比
2.4 电热驱动器的应用
为证明所提出的电热驱动器在仿生柔性机器人领域的实用性,制造并测试了1个U形复合膜构成的自爬行柔性机器人。为了保证运动过程中的统一性,将一块轻质纸板放在U形驱动器的底部。驱动器的两端都贴上梯形薄纸,作为机器人的“脚”而接触地面,从而进一步模拟微型柔性机器人。对此施加周期性电压(通电10 s,关闭8 s),并使用具有粗糙表面的海绵作为步行地面。施加电压后,机器人发生弯曲变形而使后腿向前移动。断开电源后,驱动器逐渐恢复到平直状态,后腿几乎处于同一位置,前腿向前移动,机器人向前爬行。由于周期性供电,机器人以周期性的状态完成了蠕虫蠕动运动。完整的爬行过程如图6所示,给出了柔性机器人分别在0、65、152、218 s时的运动状态,最终柔性机器人在218 s内向前爬行54 mm。
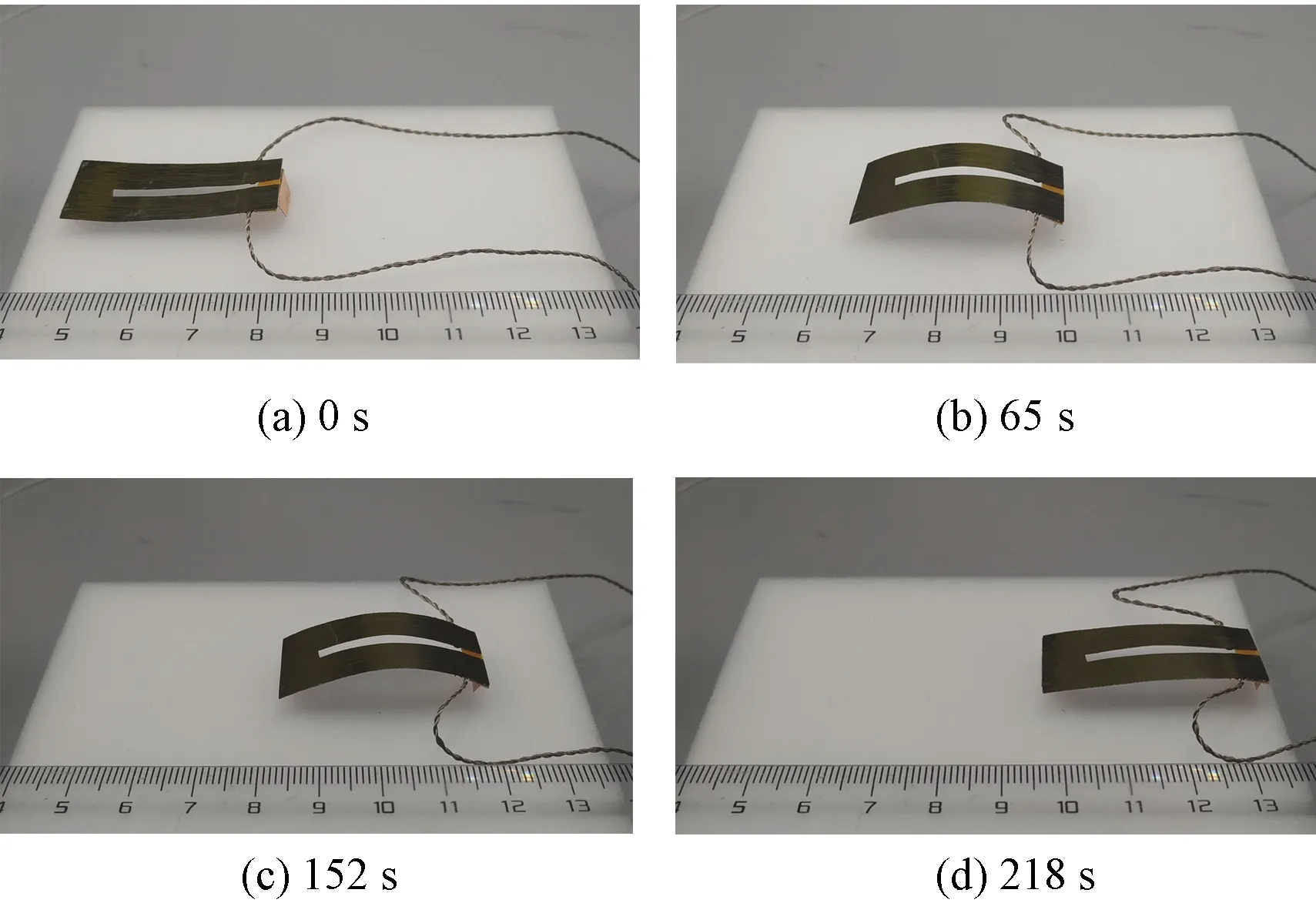
图6 爬行机器人的运动过程
3 结束语
碳纤维“骨架”作为导电导热和机械增强剂添加进复合膜中,制备具有高自形变性能的柔性G-CF/PI电热驱动器。在6 V电压下,所制备的电热驱动器可提供109°的大弯曲角和7.25 mN(其质量的10.3倍)的驱动力。自爬行机器人的制备及运动过程证明了驱动器在柔性机器人领域的应用潜能。通过多种方法制备的复合薄膜状电热驱动器来实现高自形变性能,将在智能系统、人造肌肉、人机交互等领域具有广阔的应用前景。
