某商用车可兼容手动挡车型的定速巡航控制策略
2021-08-04倪一铭杨河清
倪一铭,杨河清
(南京依维柯汽车有限公司,江苏 南京 211806)
汽车定速巡航控制的英文为Cruise Control,缩写为CC。汽车定速巡航控制系统是一种根据驾驶员需求车速进行车速自控制的系统,在一定条件下(如一定车速范围内),驾驶员通过操纵开关与整车控制器进行交互,传递并设定客户需求,在不踩油门踏板情况下通过巡航控制开关精确加减车速或自动保持车辆在某一恒定速度下行驶,可以减少驾驶员频繁调节油门踏板操作带来的脚部疲劳及视觉疲劳;精确车速控制如配合动力总成扭矩与功率的针对性模式优化控制,可带来行驶舒适性、经济性提升;合理使用可减少车辆超速带来的违章困扰。
定速巡航控制系统大多使用在自动挡车型,涉及手动挡车型的应用大部分是在高车速定挡位模式下。为了安全考虑,以往的手动挡定速巡航控制策略,车辆在换挡、踩离合或踩油门踏板时巡航功能会退出,以防止出现误操作,完成上述操作后驾驶员需重新设定巡航功能,用户体验一般。随着人们对生活工作品质需求的提升,巡航控制在汽车上的应用越来越普遍和重要,对巡航控制的安全性和多功能性也提出了更高的要求[1]。基于安全控制策略高级安全的控制方式也在逐步应用到巡航控制系统中,汽车巡航控制系统正在向智能化发展,如自适应巡航控制系统、防误操作等。某商用车开发使用了可兼容手动挡车型并预留ACC、AEBS接口的定速巡航控制策略,多条件安全控制策略满足手动和自动挡车型的定速巡航控制需求。
1 硬件拓扑结构
基本组成:VCM或ECM、BCM、TCU(AT可选)、ESP(可选)、ADAS(可选)、定速巡航开关、制动踏板及开关、制动踏板及位置反馈传感器、离合器踏板及开关(MT可选),如图1所示。
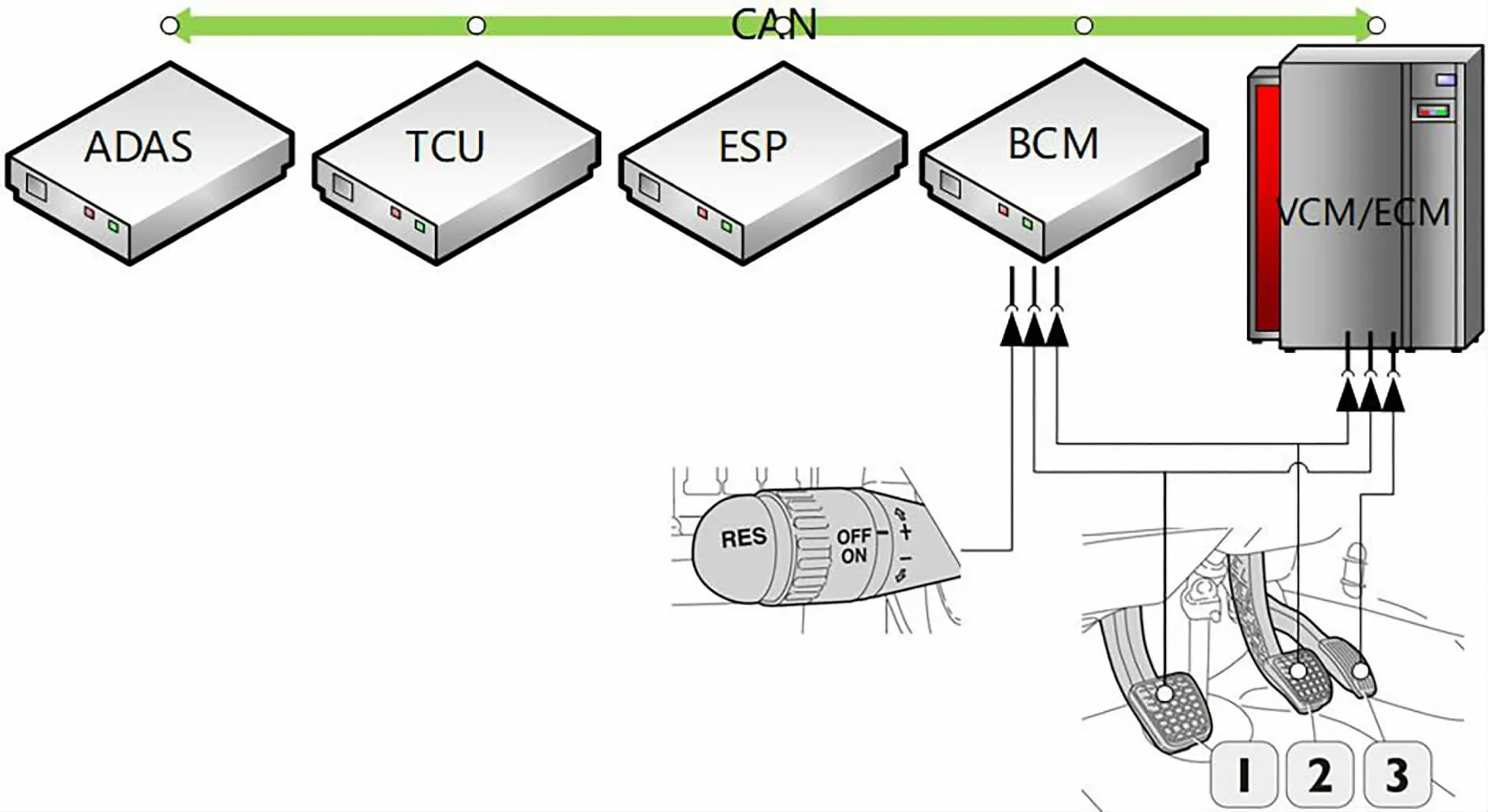
图1 硬件拓扑结构
1)ECM、BCM及其他控制器(TCU、ESP、ADAS)采用多路传输技术CAN网进行数据传输,以确保系统高效、安全、可靠。
2)离合器踏板、制动踏板信号分别硬线接入ECM、BCM,ECM校验两路信号以确保信号可靠,如校验有故障,巡航功能将禁止进入。
3)巡航开关硬线接入BCM,BCM对巡航信号进行诊断,并通过CAN发出巡航开关信号及巡航开关故障状态。
4)油门踏板信号及冗余油门踏板信号硬线接入ECM。
2 控制策略
2.1 巡航条件
本文所述控制策略巡航控制条件如表1所示,共计29项,每一项对应一个巡航使能状态位,如某一项的条件或状态不满足这项设定的巡航控制条件,则该条件巡航使能状态位置位。

表1 控制策略巡航控制条件
同时本文所述控制策略预留了设置掩码,用以开启或关闭巡航条件的监测,如表1中的“20 ACC控制禁用信号”,在手动挡车型上不配置ACC的情况下,可以设置ACC控制项的条件掩码为0,这样通过掩码的状态结果始终为0,以关闭此项目条件监测,如表2情况2与情况4。
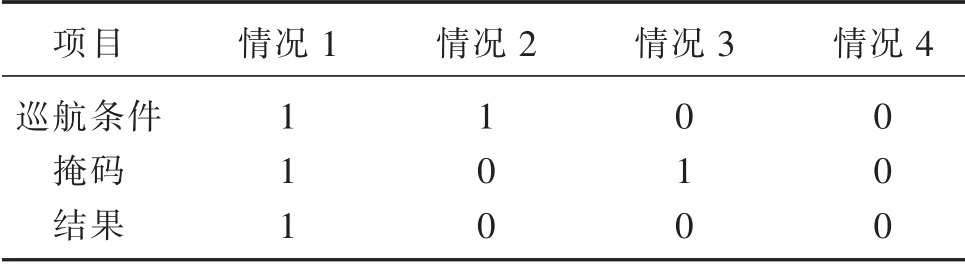
表2 项目条件监测
某商用车使用本巡航开关策略,当满足以下条件时进入巡航控制。
1)发动机启动(2),巡航开关开启(1),挡位在2挡及以上(14),车速信号在24~160km/h之间(15),巡航开关请求进入巡航控制(1)。
2)其他项目条件均满足。
2.2 巡航退出条件
巡航退出条件如图2所示,对应巡航的28项条件。
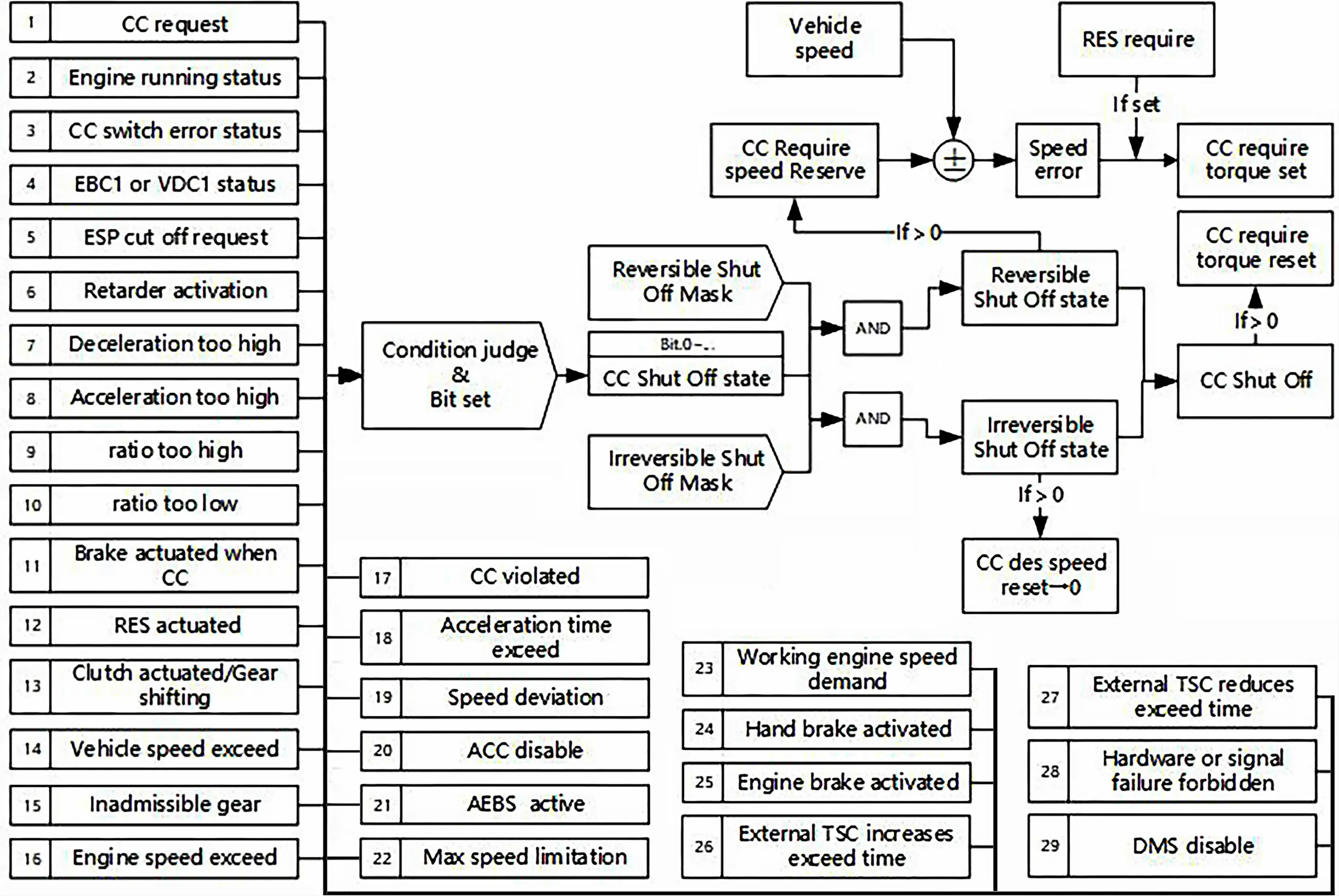
图2 巡航退出条件
根据巡航退出后是否能够通过巡航开关RES键恢复巡航车速设置两种掩码,可恢复车速掩码、不可逆掩码。区别为:当设置可恢复车速掩码并且退出条件满足时,巡航控制退出,上一次设置的巡航车速可以通过RES键恢复;对应设置不可逆掩码的巡航条件满足时,设置的巡航车速将被重置。当29项条件通过设置的掩码后得到的退出巡航状态大于0,则巡航控制退出。如巡航开关关闭(1)、车速低于24km/h(15)、检测到制动信号(11)、挡位信号不符合(14)、AEBS处于激活状态(21)等。
控制策略面向手动挡车型,可使在正常操纵情况下踩离合器升挡不退出巡航控制,如图3所示,升挡后车速平稳保持在巡航设定车速。
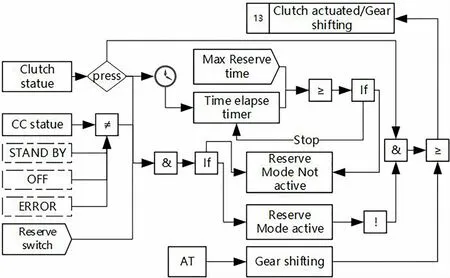
图3 控制策略
如情况1:车速设定在70km/h、挡位在5挡,踩离合升6挡后,车速可恢复至70km/h;情况2:车速设定在80km/h,当前车速为30km/h,驾驶员按顺序进行升挡过程中,续航不退出,自动匹配挡位车速上升至设定的80km/h。
策略是通过设置换挡保留模式功能来实现的,当巡航控制时,程序中保留模式开关设置开启,踩离合换挡巡航功能不退出,换挡后车辆会保持换挡前的车速,可继续通过巡航开关增加需求巡航车速,但如果离合器踩下时间超过系统设置的最大保留时间,则会退出巡航模式,保留模式时间可调,这样的控制可以提升手动挡定速巡航功能操纵驾驶舒适性,并且考虑到安全,换挡检测超过保留设置时间,巡航功能退出。
多判断条件的设置面向安全控制策略,接受来自ABS/ESP(EBC1或VDC1)、AEBS、ACC的关闭巡航控制需求,缓速器激活时巡航控制退出,减速过快(冗余制动检测),加速度过高,车速偏差超过一定时间,到达车速限制,速比(车速/发动机转速)过高或过低,制动器信号状态,不允许的挡位(倒挡、空挡或一挡),发动机转速过高或过低,手制动或电子驻车制动激活,硬件或信号故障导致的禁止启用巡航(如离合器、车速信号、制动信号等故障)这些条件并行组合,可以确保在不适宜巡航控制的条件下及时退出巡航控制,以确保安全可靠。
如,情况1:越级加挡,会导致发动机转速过低,从而退出巡航;情况2:接收到制动信号或驻车制动信号,巡航将立刻退出;情况3:换挡后,如果发动机转速变化超过阈值,巡航将退出;情况4:制动开关信号或车速信号异常,将阻止进入巡航控制或立即退出巡航。
多判断条件组合考虑到各种可能出现的意外,面向安全。
2.3 ADAS接口
控制策略预留有ADAS的ACC和AEBS接口。
1)ACC接口:巡航的控制需求可调整由ACC发起(1),可将CC功能作为ACC控制策略的组成部分,可接受响应ACC控制器的ACC控制禁用信号退出巡航(20),也设置有内部安全判断,外部(ESP、ACC等)车速或扭矩需求增加巡航控制扭矩的时间超过允许时间(26)、外部(ESP、ACC等)车速或扭矩需求降低巡航控制扭矩的时间超过允许时间(27)。
2)AEBS接口:AEBS激活时立即退出巡航功能(21),用以响应AEBS功能。
3)DMS接口:预留驾驶员状态监测接口,当接收到驾驶员状态异常信号时,如驾驶员疲劳等,巡航将立刻退出。
以上功能可通过仪表提示驾驶员,告知巡航功能退出原因,人机交互性良好。
3 功能测试
软件开发好后针对手动挡实车换挡进行测试,如图4所示,手动挡车型在正常换挡时,即换挡或踩离合在保留模式计时范围内(离合器信号见序号5紫色线条,第10s踩下持续0.9s,保留模式信号见序号8绿色点划线与离合器信号同步),换挡后车辆将继续按巡航车速行驶(车速信号见序号7红色线条,挡位信号见序号6深蓝色线条),驾驶员可继续通过巡航开关提升车速。如图5所示,如遇手动车型换挡时间或踩离合时间过长,超过设置的保留模式时间1.3s,保留模式退出(图5序号8绿色点划线),但离合器信仍未松开(图5序号5绿色点划线),巡航功能立即退出,车速开始下降,设置的巡航需求车速仍然保留(序号4天蓝色线条),驾驶员可以通过RES键恢复巡航车速,功能满足设计要求。
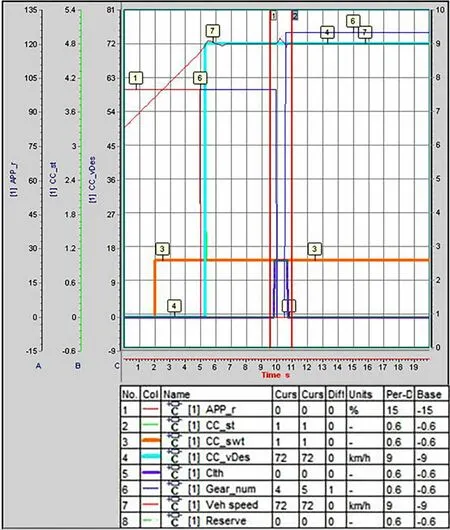
图4 保留功能启用,换挡后,巡航功能不退出
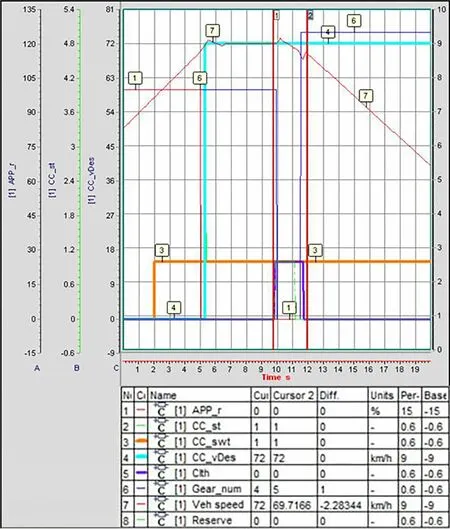
图5 保留模式超时,巡航功能退出
针对ADAS接口功能进行了实车测试,如图6所示,当控制器在第2s接收到总线AEBS激活状态信号后(序号8棕色线条),巡航功能立即退出(序号2绿色线条从1置0),车辆开始制动,车速迅速下降,设置的巡航需求车速重置为0(序号4天蓝色线条)。如图7所示,当控制器在第5s接收到总线DMS退出指令后(见序号8天深绿色线条),巡航功能立即退出(见序号2绿色线条从1置0),设置的巡航需求车速重置为0(序号4天蓝色线条),避免因驾驶员疲劳等问题带来的不良后果,并可通过仪表提醒驾驶员,告知巡航功能退出原因,人机交互性良好。
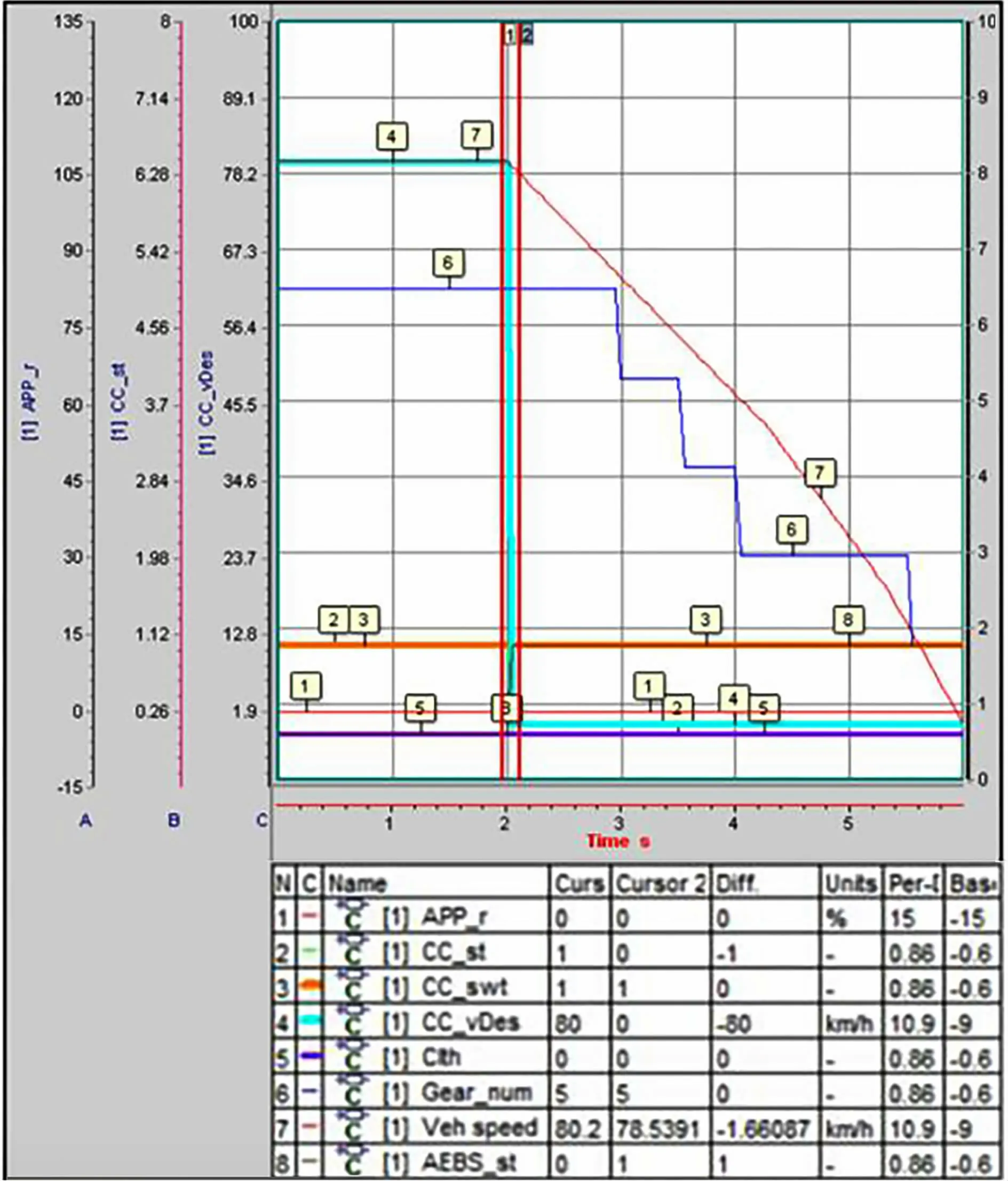
图6 接收到AEBS激活状态后,巡航功能退出
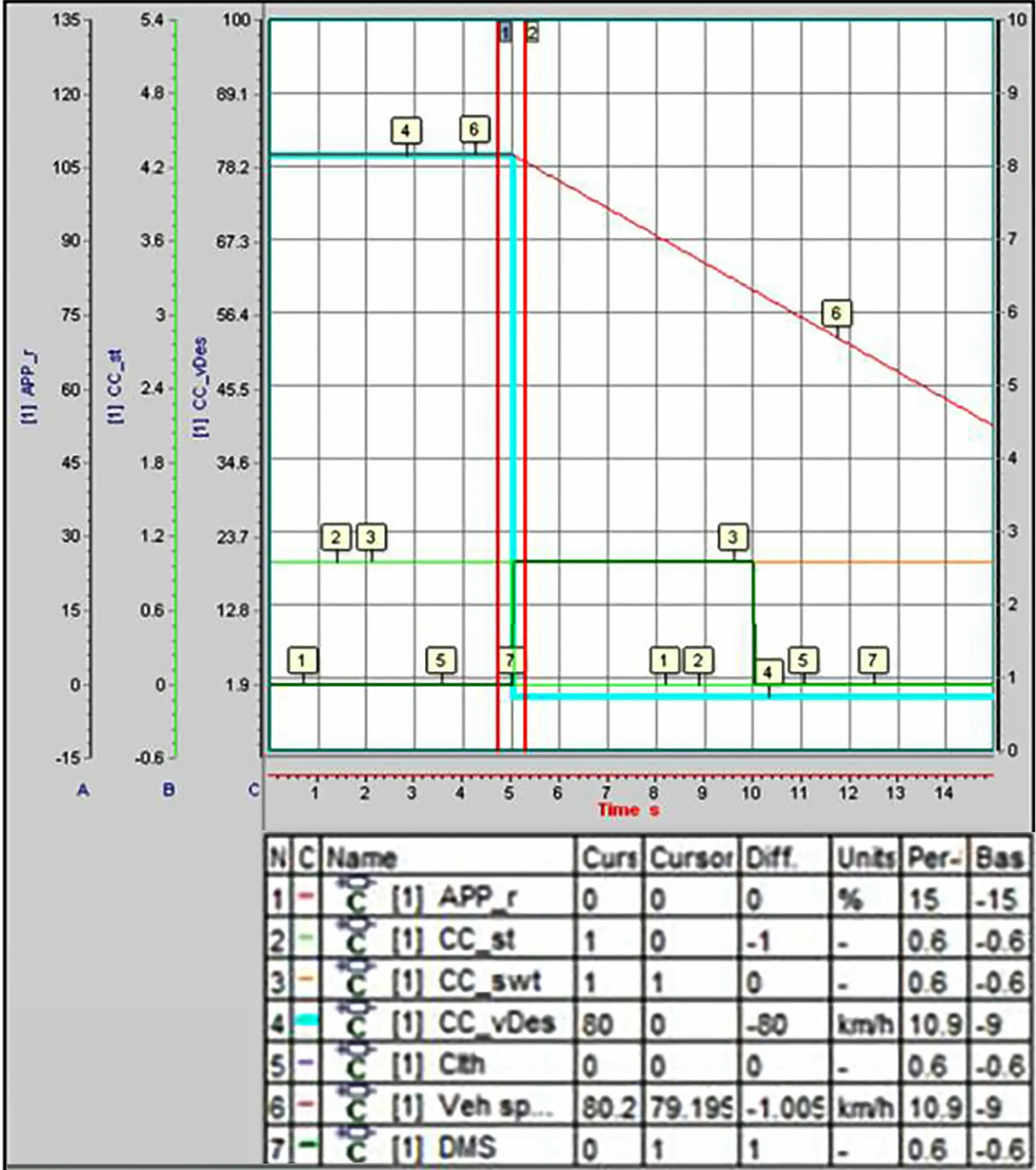
图7 接收到DMS指令后,巡航功能退出
4 结束语
本文对在某商用车中开发使用的定速巡航控制策略进行了详细描述,尤其在定速巡航条件控制策略方面,对定速巡航控制的进入退出条件及控制策略作了详细介绍,对各个模块的功能进行了充分地解释和说明,并且对该定速巡航控制策略进行了大量的功能测试验证和测试结果分析,取得了比较理想的测试结果。策略紧跟技术发展潮流,不仅可兼容手动挡车型,而且预留ADAS接口,基于安全控制策略设计,满足手动和自动挡车型定速巡航控制需求,提升了手动挡定速巡航功能操纵驾驶舒适性,并且安全可靠,人机交互性良好。