一种基于阴影检测的运动目标分割改进算法
2021-08-03王伟郭中华兰旭婷
王伟 郭中华 兰旭婷
摘要:讨论了用于背景减除法的常见颜色模型,针对低饱和度下色度值不稳定的问题,提出一种基于色度、亮度和饱和度空间(IHIS)的改进算法。该方法运用具有饱和度的三维极坐标系统表示颜色的能力,采用饱和度加权色度统计来色度一饱和度关系进行建模,而该饱和度与亮度函数无关。通过CDW2014公开数据集的实验,与基于RGB和HSV的方法进行了比较,分割结果的客观评价指标与主观视觉验证了该改进算法更适合于鲁棒性背景建模和阴影抑制,表明了该方法的有效性。
關键词:运动分割;阴影检测;背景扣除;色彩空间
中图分类号:TP391.4 文献标志码:A
文章编号:1008-1739(2021)09-67-5
An improved Algorithm for Moving Target Segmentation Based on
Shadow Detection
WANG Wei,GUO Zhonghua1.2, LAN Xutingl
(1. School of Physics and Electrical Engineering, Ningxia University. Yinchuan 750021. China;
2. Ningxia Key Laboratory of Intelligent Sensing for Desert Information. Yinchuan 750021, China)
Abstract: The common color models used for background subtraction are discussed. Aiming at the problem of unstable chromaticitYvalues under low saturation, an improved algorithm based on chromaticity, bri~tness and saturation space (IHLS) is proposed. Thealgorithm utilizes the capability of representing colors of a three-dimensional polar coordinate system with saturation. and adopts thesaturation-weighted chromaticity statistics to model the chroma-saturation relationship, and the saturation has nothing to do with thebrigtness function. Throuah the CDW2014 public data set experiment, compared with the method based on RGB and HSV. theobjective evaluation index of the segmentation result and subjective vision verify that the improved algorithm is more suitable for robustbackground modeling and shadow suppression, and has availability.
Keywards: motion detection: shadow detection; background subtraction; color space
0引言
运动对象的检测与分割是视觉研究领域的一个重要课题,诸如目标跟踪和场景理解之类的视觉监视应用程序,其基础步骤就是检测运动对象。背景减除算法通常用于通过使用统计颜色背景模型来检测感兴趣的对象。目前,许多系统利用标准化RGB的特性来改善一些场景照明变化中的不敏感性。在研究阴影检测与分割的算法中,辛国江等人[1]提出了一种基于体色向量匹配的阴影检测与分割算法。在前景区域与背景区域亮度对比之上,利用体色向量匹配方法得到最终的阴影区域。李宗民等人[2]引入了基于颜色不变量的阴影检测法,提高分割精度。Hong和Woo等人[3]在其背景分割系统中应用了标准化RGB空间。WanXia Yu等人[4]使用了颜色空间进行自适应背景减除算法。除了归一化RGB外,以三维极坐标(色度、饱和度和亮度)的RGB颜色空间的表示形式还用于监视应用程序中的变化检测和阴影抑制。WANG Weihua等人[5]将颜色模型(HSV)应用于实时视频分割的背景建模。在他们的工作中,引入了一组复杂的规则,以反映检测和模型更新过程中观察到的和背景颜色信息的相关性。Cucchiara等人[6]提出了一种基于RGB的背景模型,将其转换为颜色模型表示形式,以便利用HSV色度信息的属性进行阴影抑制。
本文方法建立在改进的色度、亮度和饱和度颜色空间上,更适合于背景减除法。使用饱和度加权的色度统计[7]来处理弱饱和度下的不稳定色度值,可以有效分类场景照明(例如阴影)的变化,对饱和度和色调之间的关系进行建模。
1颜色空间
I.I归一化RGB
标准化RGB空间旨在将色度分量与亮度分量分开。通过使用以下公式,可以将红色、绿色和蓝色通道转换为其归一化的对应通道:
1-R+ G}-B,FR/1,g=G/1,~B/1
(1) 如果J≠O且Fg= IFO,则这些归一化通道之一是冗余的[8],因为根据定义,f+g+b=1。
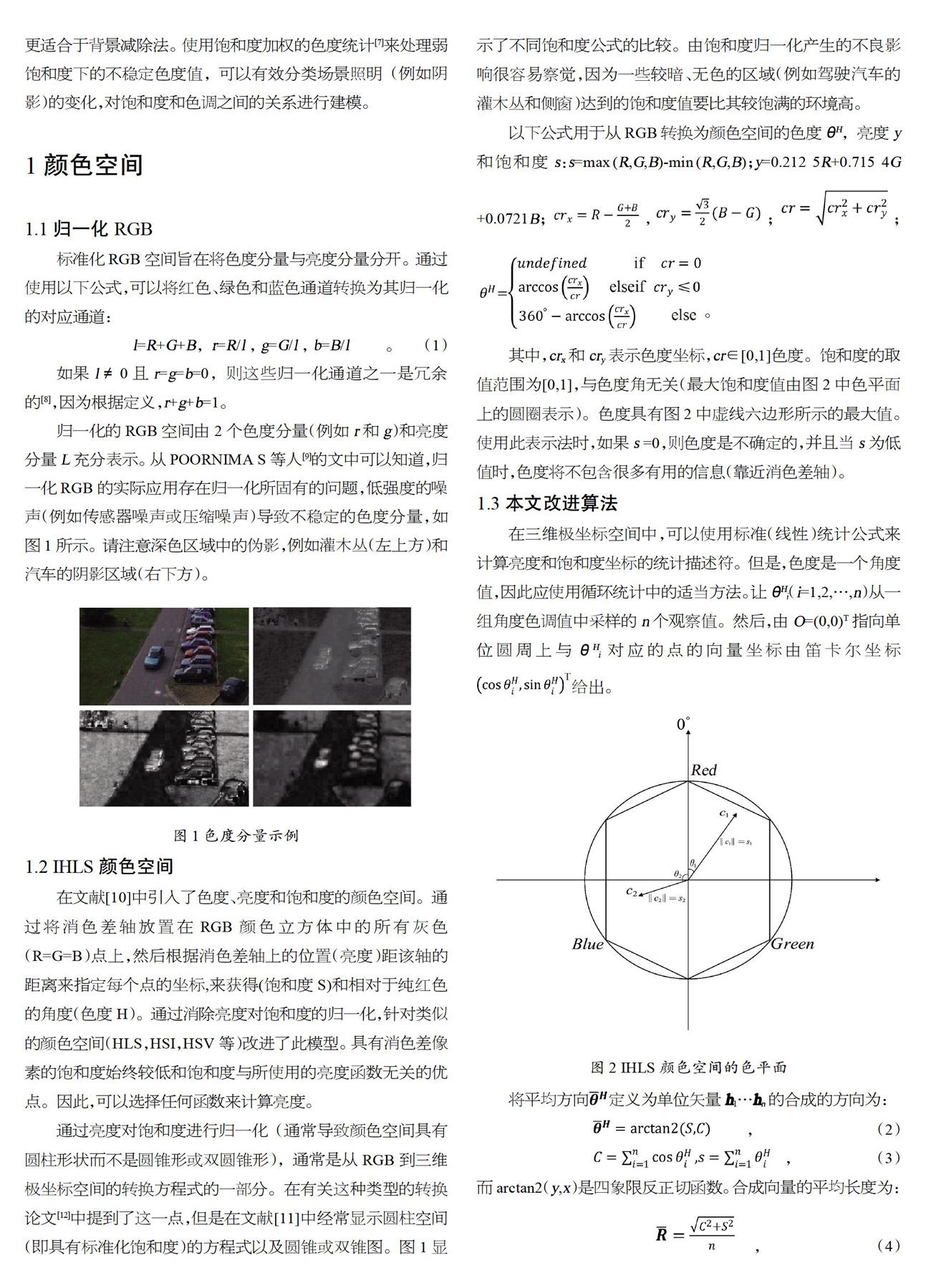
归一化的RGB空间由2个色度分量(例如r和g)和亮度分量L充分表示。从POORNIMA S等人[9]的文中可以知道,归一化RGB的实际应用存在归一化所固有的问题,低强度的噪声(例如传感器噪声或压缩噪声)导致不稳定的色度分量,如图1所示。请注意深色区域中的伪影,例如灌木丛(左上方)和汽车的阴影区域(右下方)。
1.2 IHLS颜色空间
在文献[10]中引入了色度、亮度和饱和度的颜色空间。通过将消色差轴放置在RGB颜色立方体中的所有灰色( R-G-B)点上,然后根据消色差轴上的位置(亮度)距该轴的距离来指定每个点的坐标,来获得(饱和度S)和相对于纯红色的角度(色度H)。通过消除亮度对饱和度的归一化,针对类似的颜色空间(HLS,HSI,HSV等)改进了此模型。具有消色差像素的饱和度始终较低和饱和度与所使用的亮度函数无关的优点。因此,可以选择任何函数来计算亮度。
通过亮度对饱和度进行归一化(通常导致颜色空间具有圆柱形状而不是圆锥形或双圆锥形),通常是从RGB到三维极坐标空间的转换方程式的一部分。在有关这种类型的转换论文[12]中提到了这一点,但是在文献[11]中经常显示圆柱空间(即具有标准化饱和度)的方程式以及圆锥或双锥图。图1显示了不同饱和度公式的比较。由饱和度归一化产生的不良影响很容易察觉,因为一些较暗、无色的区域(例如驾驶汽车的灌木丛和侧窗)达到的饱和度值要比其较饱满的环境高。
以下公式用于从RGB转换为颜色空|司的色度eH,亮度y和饱和度s:Fmax (R,G,B)-min (R,G,B);y=0.212 5R+
其中,crx和cry表示色度坐标,cr∈[O,1]色度。饱和度的取值范围为[O'1],与色度角无关(最大饱和度值由图2中色平面上的圆圈表示)。色度具有图2中虚线六边形所示的最大值。使用此表示法时,如果s -0,则色度是不确定的,并且当s为低值时,色度将不包含很多有用的信息(靠近消色差轴)。
1.3本文改进算法
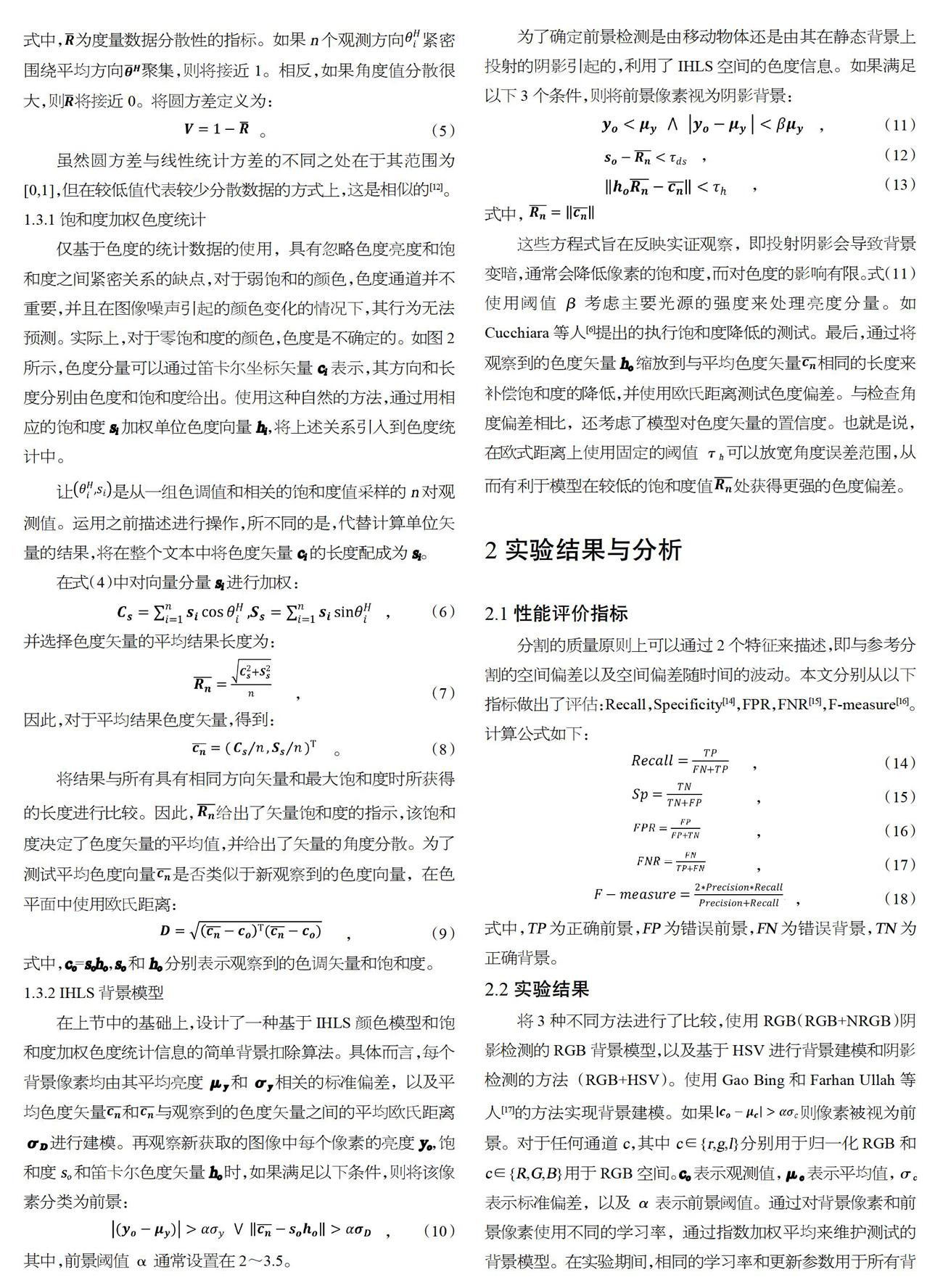
在三维极坐标空间中,可以使用标准(线性)统计公式来计算亮度和饱和度坐标的统计描述符。但是,色度是一个角度值,因此应使用循环统计中的适当方法。让e7c卢1,2,…,n)从一组角度色调值中采样的n个观察值。然后,由O一(O,O)7指向单位圆周上与日i对应的点的向量坐标由笛卡尔坐标(COS OH, siri OH)。给出。
将平均方向OH定义为单位欠量h1…h1的合成的方向为而arctan2(y,x)是四象限反正切函数。合成向量的平均长度为:式中,R为度量数据分散性的指标。如果n个观测方向日?紧密围绕平均方向OH聚集,则将接近1。相反,如果角度值分散很大,则R将接近0。将圆方差定义为:
V=1-R。
(5)
虽然圆方差与线性统计方差的不同之处在于其范围为[0'1],但在较低值代表较少分散数据的方式上,这是相似的[12]。
1.3.1饱和度加权色度统计
仅基于色度的统计数据的使用,具有忽略色度亮度和饱和度之间紧密关系的缺点,对于弱饱和的颜色,色度通道并不重要,并且在图像噪声引起的颜色变化的情况下,其行为无法预测。实际上,对于零饱和度的颜色,色度是不确定的。如图2所示,色度分量可以通过笛卡尔坐标欠量c1表示,其方向和长度分别由色度和饱和度给出。使用这种自然的方法,通过用相应的饱和度两加权单位色度向量h,将上述关系引入到色度统计中。
让(os。)是从一组色调值和相关的饱和度值采样的n对观测值。运用之前描述进行操作,所不同的是,代替计算单位欠量的结果,将在整个文本中将色度欠量白的长度配成为两。 在式(4)中对向量分量两进行加权:
C.=∑i Si COS OH,s.=∑i Si sinOH,
(6)并选择色度欠量的平均结果长度为:因此,对于平均结果色度欠量,得到:
Cn=(C。/n,S,/n)T 。
(8) 将结果与所有具有相同方向欠量和最大饱和度时所获得的长度进行比较。因此,r给出了欠量饱和度的指示,该饱和度决定了色度欠量的平均值,并给出了欠量的角度分散。为了测试平均色度向量c是否类似于新观察到的色度向量,在色平面中使用欧氏距离式中,co-&h。,岛和h分别表示观察到的色调欠量和饱和度。
1.3.2 IHLS背景模型
在上节中的基础上,设计了一种基于IHLS颜色模型和饱和度加权色度统计信息的简单背景扣除算法。具体而言,每个背景像素均由其平均亮度u,和q,相关的标准偏差,以及平均色度欠量瓦和瓦與观察到的色度欠量之间的平均欧氏距离tTo进行建模。再观察新获取的图像中每个像素的亮度%,饱和度s。和笛卡尔色度欠量屯时,如果满足以下条件,则将该像素分类为前景:
l(y.-tty)l> ao'yV IICn -S.h.||>a盯D,
(10)其中,前景阙值n通常设置在2-3.5。 为了确定前景检测是由移动物体还是由其在静态背景上投射的阴影引起的,利用了IHLS空间的色度信息。如果满足以下3个条件,则将前景像素视为阴影背景
这些方程式旨在反映实证观察,即投射阴影会导致背景变暗,通常会降低像素的饱和度,而对色度的影响有限。式(II)使用阈值 B考虑主要光源的强度来处理亮度分量。如Cucchiara等人[6]提出的执行饱和度降低的测试。最后,通过将观察到的色度欠量h缩放到与平均色度欠量c相同的长度来补偿饱和度的降低,并使用欧氏距离测试色度偏差。与检查角度偏差相比,还考虑了模型对色度欠量的置信度。也就是说,在欧式距离上使用固定的阈值r。可以放宽角度误差范围,从而有利于模型在较低的饱和度值r处获得更强的色度偏差。
2实验结果与分析
2.1性能评价指标
分割的质量原则上可以通过2个特征来描述,即与参考分割的空间偏差以及空间偏差随时间的波动。本文分别从以下指标做出了评估:Recall,Specificity[14],FPR,FNRc1习,F_measurec[16]。计算公式如下:式中,TP为正确前景,FP为错误前景,刷为错误背景,TN为正确背景。
2.2實验结果
将3种不同方法进行了比较,使用RGB( RGB+NRGB)阴影检测的RGB背景模型,以及基于HSV进行背景建模和阴影检测的方法( RGB+HSV)。使用Gao Bing和Farhan Ullah等人[17]的方法实现背景建模。如果le。“。I> acFe则像素被视为前景。对于任何通道c,其中c∈{c鲥)分别用于归一化RGB和c∈{R,G,B)用于RGB空间。岛表示观测值,p。表示平均值,表示标准偏差,以及a表示前景阈值。通过对背景像素和前景像素使用不同的学习率,通过指数加权平均来维护测试的背景模型。在实验期间,相同的学习率和更新参数用于所有背景模型,以及相同数量的训练框架。对于RGB( RGB+NRGB)阴影抑制是基于Horprasert的方法[3-4]实现的。如果满足以下条件,则每个前景像素都被分类为式中,口和t。表示强度和颜色通道的最大允许变化的阈值,因此将像素视为阴影背景。
在基于HSV的方法(RGB+HSV)中,在应用以下阴影测试之前,将RGB背景模型转换为HSV(具体是参考亮度度。、饱和度p;和色度脚)。在以下情况下,前景像素被归类为阴影
第一个条件测试观察到的亮度v0在p.和卢:所定义的范围内是否变暗。在饱和度s上执行差异阈值。阴影会降低点的饱和度,并且图像与参考之间的差异通常对阴影点为负。最后一个条件考虑到这样的假设,即阴影只会使色度eHo产生很小的偏差。
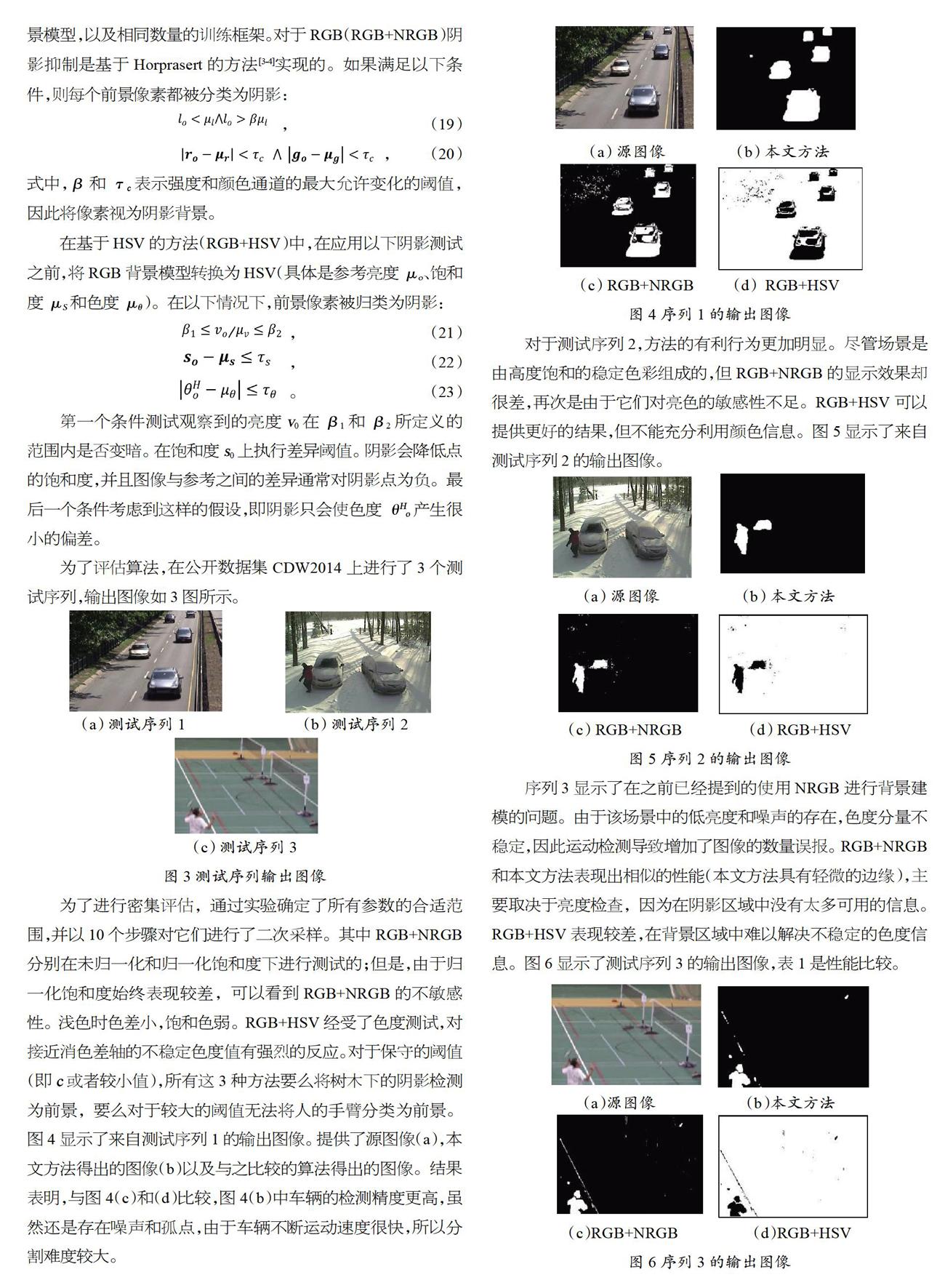
为了评估算法,在公开数据集CDW2014上进行了3个测试序列,输出图像如3图所示。
为了进行密集评估,通过实验确定了所有参数的合适范围,并以10个步骤对它们进行了二次采样。其中RGB+NRGB分别在未归一化和归一化饱和度下进行测试的;但是,由于归一化饱和度始终表现较差,可以看到RGB+NRGB的不敏感性。浅色时色差小,饱和色弱。RGB+HSV经受了色度测试,对接近消色差轴的不稳定色度值有强烈的反应。对于保守的阈值(即c或者较小值),所有这3种方法要么将树木下的阴影检测为前景,要么对于较大的阈值无法将人的手臂分类为前景。图4显示了来自测试序列1的输出图像。提供了源图像(a),本文方法得出的图像(b)以及与之比较的算法得出的图像。结果表明,与图4(c)和(d)比较,图4(b)中车辆的检测精度更高,虽然还是存在噪声和孤点,由于车辆不断运动速度很快,所以分割难度较大。
对于测试序列2,方法的有利行为更加明显。尽管场景是由高度饱和的稳定色彩组成的,但RGB+NRGB的显示效果却很差,再次是由于它们对亮色的敏感性不足。RGB+HSV可以提供更好的结果,但不能充分利用颜色信息。图5显示了来自测试序列2的输出图像。
序列3显示了在之前已经提到的使用NRGB进行背景建模的问题。由于该场景中的低亮度和噪声的存在,色度分量不稳定,因此运动检测导致增加了图像的数量误报。RGB+NRGB和本文方法表现出相似的性能(本文方法具有轻微的边缘),主要取决于亮度检查,因为在阴影区域中没有太多可用的信息。RGB+HSV表现较差,在背景区域中难以解决不稳定的色度信息。图6显示了测试序列3的输出图像,表1是性能比较。
3结束语
在提出的框架中,提倡应用饱和度加权的色度统计数据来解决低饱和度下色度值不稳定的问题。实验表明,在几个具有挑战性的序列中,本文方法优于使用归一化RGB和HSV的方法。此外,由于NRGB在黑暗区域的行为不稳定,因此不建议将NRGB用于背景建模。但是,本文方法的一个问题是,由于使用了饱和度加权色调统计数据,因此无法判断背景模型中的短色度欠量是不稳定的色调信息还是永久性的低饱和度的结果。尽管在进行的实验中没有发现明显的损伤,但这是进一步研究的主题,在这种情况下,这种缺陷会带来问题。其他感兴趣的领域是检查欧式距离的替代方法,以比较色度向量,以及对阴影分类进行实验幽性深入研究。
参考文献
[1]辛国江,邹北骥,刘相滨,等.运动物体的阴影检测与分割[J]工程图学学报,2007(6):85-90.
[2]李宗民,张洲凯,刘玉杰.基于像素自适应背景建模的运动目标分割[J].计算机工程与设计,2018,39(3):785-791.
[3] HONG D,WOO. W.A Background Subtraction for aVision-based User Interfac e[C]//ln Proceedings of 2003 JointConference of The 4th International Conference OnInformation. Communications& Signal Processing and 4thPacific-Rim Conference on Multimedia.15一18 December2003, Singapore:IEEE,2003: 1263-1267.
[4] WAN Xiayu.JING Su.Moving Vehicle Detection SchemeUsing Edge Information and Background Subtraction inYcbcr Color Space[J] .Adv Mat Res.2014.3326:2605-2608.
[5] WANG Weihua. WANG Weiqing.Video SegmentationAlgorithm Based on H sv Color Piece[J].Procedia Environ Sci.20II.IO(Pt A):739-742.
[6] CUCCHIARA R,GRANA C,PICCARDI M,et al. ImprovingShadow Suppression in Moving Obj ect Detection with HSVColor Information[C]//TSC 2001. OaHand: IEEE.2001 :334-339.
[7] IVAN H.MICHAEL B. H.THOMAS B M. et al. ChromaticShadow Detection and Tracking for Moving ForegroundSegmentation [J]. Image Vis Comput,2015,41 :42-53 .
[8] NICOLAS H.Pinel J M.Joint Moving Cast ShadowsSegmentation and Light Source Detection in Video Sequences[J] .Signal Processing: Image Communication,2005.21(1) :22-43 .
[9] POORNIMA S.SUBRAMANIAN S. Unconstrained IrisAuthentication Through Fusion of Rgb Channel Infonnation[J] .International Journal of Pattern Recognition and ArtificialIntelligence.2014.28(5):1-10.
[10] SALVADOR E.CAVALLARO A.EBRAHIMI T. CastShadow Segmentation Using Invariant Color Features[J].Computer Vision and Image Understanding.2004.95(2) : 238-259.
[II] KYUNG J K.MIN B K.CHEON H.et aI.Wide Color Gamutand High Dynamic Range Displays Using Rgbw Lcds[J].Displays,2015.40 :9-16.
[12] CUCCHIARA R.GRANA C.PICCARDI M,et aI.DetectingMoving Obj ects, Gho sts. And Shadows in Video Streams[J] .IEEE Transactions on Pattern Analysis and MachineIntelligence.2003 .25 (10) :133 7-1342.
[13] GRACIELA B.DANIELA R.WENCESLAO G M. Goodnessof Fit Test for Directional Data[J].Scandinavian Journal ofStatistic s,2014,41(1):259-275.
[14] THONGKAMWITOON T.ARAMVITH S.CHALIDAB HONGSE T H.An Adaptive Real-timeBackground Subtraction and Moving Shadows Detection[C].//2004 IEEE International Conference on Multi media andExpo.Taipei: IEEE,2004: 156-160.
[15] HII A,HANN C E.CHASE J G.et aI.Fast Nonnalized CrossCorrelation For Motion Tracking Using Basis Functions[J].Comput Methods Programs Biomed.2006,82(2) : 144-156.
[16] VILLEGAS P.MARICHAL X. Perceptually-weightedEvaluation Criteria for Segmentation Masks in Video Sequences[J]. IEEE Trans. on hmage Process.2004.13(8) : 1 092-1103.
[17] ANON. An Efficient Static Filters for Sky Detection[J].Research Joumal of Applied Sciences, Engineering andTechnology, 2017, 14(8) :276-280.
