露天矿智能测绘与精准算量技术在芒来露天矿的应用
2021-08-03杨程烨周谦益李保生梁秀峰
杨程烨,周谦益,李保生,梁秀峰
(1.中铁资源苏尼特左旗芒来矿业有限公司,内蒙古 锡林郭勒盟 011300;2.北京龙睿海拓科技发展有限责任公司,北京 100071)
传统的露天矿验量方式以GPS 结合全站仪模式进行数据采集,作业过程中需要将人送至工作面、叫停作业设备、步行采集特征点,采用人工徒步的方式测量完成矿区所有范围的采场及排土场区域地形,并利用CASS 完成特征线构建、特征点提取等工作。在长期实践过程中,发现传统验量方法存在许多问题,首先,在此种作业过程中存在边帮落石伤人、交通事故等风险,其次,测绘期间大型设备暂停作业也无形中造成了经济损失,影响矿区生产效率;再者,测量精度、数据密度低,不仅无法全面反映采剥工程量,还无法满足数字化矿山及智慧化矿山建设对空间地理信息数据的要求;人为选择的特征点,只应用于采剥量计算,数据复用率低。因此迫切需要一种更加安全高效的测绘计量方式提高测绘生产效率。近年来无人机载激光雷达在各行业的应用正处于不断的研究与实践当中。朱海斌[1]等人,将搭载摄影设备的无人机应用在露天矿测测绘中,提高了测绘的效率;徐阳亮[2]以洞庭湖摄区为例,分析了LIDAR 点云的数据采集方式和数据精度,证实了LIDAR 点云精度满足日常测绘精度要求;李国元[3]、孙淑丽[4]、杜芳[5]等人都使用LIDAR 技术在各行业进行了应用。但目前尚无人将无人机机载雷达数据采集手段和新型的基于三维数据的算量手段进行相结合计算采剥量。为此,基于无人机机载雷达测量技术以其非接触测量的技术特点,研究一种更加高效的露天矿测绘流程方法,降低工作人员进入矿坑区域的工作时间,提高测绘人员的安全性,并且确保得到矿区全面完整的符合工程要求的高精度的三维数据信息为后期精准计量工程量提供准确完整的数据支撑,从而有效提高算量精度[1]。
1 机载激光雷达测量技术
机载激光雷达简称机载LiDAR,是一种集激光、全球定位系统和惯性导航系统3 种技术于一身的空间测量系统[2],它集成了GNSS、IMU、激光扫描仪等光谱成像设备[3]。可以利用返回的脉冲可获取探测目标高分辨率的距离、和反射率等信息,最后经过综合处理而得到地面区域观测点的三维地理坐标。按其功能分主要有2 大类:①测深机载LiDAR(或称海测型LiDAR),主要用于海底地形测量;②地形测量机载LiDAR(或称陆测型LiDAR),正广泛应用于各个领域,在高精度三维地形数据(数字高程模型(DEM))的快速、准确提取方面,具有传统测绘手段不可替代的独特优势。尤其对于一些测图困难区域的高精度DEM 数据的获取,LiDAR 的技术优势更为明显。
1.1 机载雷达构成
机载LIDAR 的系统组成主要包括:
1)GPS 导航模块。机载GPS 接收机和地面控制站的GPS 接收及对无人机进行差分定位[4]。
2)IMU(惯性导航系统)。通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息[5]。
3)激光扫描测距模块。获取激光发射点至地面测量点之前的距离。
4)工作平台。工作平台采用智能无人机飞行平台,智能无人机平台具有安全性强、作业效率高、智能化高等特点。
1.2 激光雷达传感器的工作原理
通过激光雷达传感器,无人机可以向地面发射激光脉冲,通过回波讯号来精准检测距离和平面高度,从而进行三维立体构图[6]。机载雷达原理如图1。
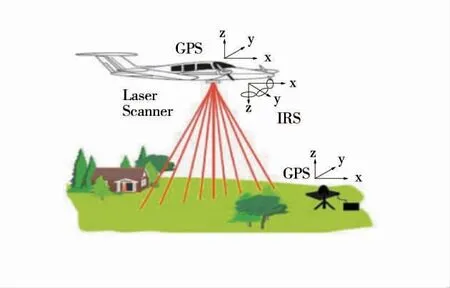
图1 机载雷达原理
激光雷达传感器工作流程:①发射激光脉冲;②记录回波讯号;③距离测量(飞行时间x 光速);④检索平面位置和高度;⑤精确计算回波位置。
1.2 无人机机载雷达测绘优势
1)主动式测绘方式。机载激光雷达技术通过发射激光脉冲获取测绘目标返回来的信号得到测绘目标的三维空间点云数据,这种主动式测绘方式的优势在于测绘过程不受天气、光照等条件制约。
2)快速高效安全的获取空间信息。机载激光雷达技术通过无人机平台的飞行和激光脉冲的扫描完成探测工作,能快速高效的获取大面积的地表空间信息。极大地减少了工作量,提高了工作效率,同时也减少了人员的外业工作量,保证人员安全作业。无人机作为平台,可以探测很多较为危险的区域,在一定程度上保障作业的安全性。
3)对植被有一定的穿透力。机载激光雷达技术发射的激光脉冲信号对植被具有一定的穿透能力,可以很大程度上减少植被枝叶遮挡等造成的信息损失,获取森林地区的真实地形数据。对于扬尘,机载雷达也有一定的穿透,能够获取底层地面数据[7]。
4)获取的数据精度较高。探在80 m 的飞行高度下,机载激光LiDAR 所获取的点云数据的精度可以达到1~3 cm。
2 芒来露天矿智能测绘与精准算量
2.1 芒来露天矿矿区概况
芒来露天矿位于内蒙古锡林郭勒盟白音乌拉矿区,总体规划10.0 万t/a,一期规模5.0 万t/a。矿田东西长4.79~6.03 km,南北宽2.62~3.58 km,面积15.627 km3。矿田由22 个拐点组成,开采标高696~962 m,开采深度40~250 m,最终边坡角23°~24°
2.2 芒来露天矿智能测绘系统
智能测绘系统技术路线图如图2,无人机露天矿智能测绘主要按照“测区规划-外业数据采集-内业数据处理-精度检核”的流程开展工作,本次应用研究中,采用智能无人机飞行平台采集采坑数据,该平台支持一键起飞,无需人为操控,本身加在高精度GNSS 模块进行实时差分定位,确保数据的采集精度满足后期验量需求。

图2 智能测绘系统技术路线图
2.3 测区规划
利用智能无人机进行数据采集前,根据芒来露天矿矿区的具体情况,以及矿区生产实际精度要求情况,制定飞行方案,从而使获取的激光雷达数据符合矿区实际生产应用要求的精度。
涉及测区面积共计1.5 km2,因为采集数据位于矿坑采区,最高点与最低点高差约100 m,这样的高差为点云数据获取增加了很大的难度,如按照统一航高规划飞行,不能保证海拔较低地方的点云密度和点云精度。为了保证获取高精度点云以及点云密度保持一致,飞行采用变高跟随飞行,该功能保证了无人机距离地面的相对航高保持一个稳定值,同时获取的点云数据的精度和密度也保持了一致。
航线设计是制作高质量影像图的关键,航线需要根据测区的几何形态与空间环境,规划飞行航线和飞行参数,在采集区域设定获取数据的参数要求,即可自动生成最佳的飞行方案。需要考虑飞行航高,重叠度、点密度等因素。航线规划的主要参数为:点密度18 点/m3;点云重叠度50%;航高100 m;海拔高942 m。
2.4 外业数据采集
1)基站架设。在矿区已知控制点上架设GPS 设备,并且GPS 要早于无人机启动时间,即GPS 基站要遵循“早架晚收”的原则,保证无人机接收卫星的时长,落在GPS 基站的接收的时间段中。基站与无人机建立联系,为无人机数据采集提供导航文件。实现数据的差分结算,保障数据精度,减少现场铺设控制点等工作。由于采用的是PPK 无人机,只需要架设基站即可,不需要再架设电台,只需使基站和无人机接收同组卫星信号即可。
2)变高DEM 制作。变高飞行需要用能反映真实地形起伏的DEM 作为地图。所以在变高飞行之前,需要先对测区进行定高飞行,制作DEM。在航线规划模块中,基于高精度实景三维地形选择需要进行采集的区域,根据露天矿矿坑的几何形态与空间环境,规划飞行航线和飞行参数,在采集区域设定获取数据的参数要求,即可自动生成最佳的飞行方案。数据采集完毕后,经解算生成矿区的点云数据。基于点云数据,快速处理出DEM(一次做出采剥区的DEM,可以多次使用),为无人机下次变高飞行做底图。
3)变高数据获取。根据平飞生成的高精度DEM的几何形态与空间环境,规划飞行航线和飞行参数,在采集区域设定获取数据的参数要求,即可自动生成最佳的飞行方案。变高航线主要参数为:点密度18 点/m3;重叠度50%;行高70 m。参数设置完成后,启动无人机进行数据采集。
4)七参数转换点采集。由于GPS 基站和无人机接收的数据是WGS-84 坐标,而矿区生产数据都是采用的北京54 坐标。为了将成果转换为北京54 坐标系,需要经在矿区采集一些转换点,进行参数计算。坐标转换点需要均匀分布在矿区的周围,并且同时采集其WGS-84 椭球坐标和矿区平面坐标。
2.5 数据处理
在内业数据处理中,使用诺瓦泰软件对无人机进行轨迹解算,云数据解算完毕之后,就需要对点云进行处理,得到矿区各部门可以使用的数据格式。
1)轨迹解算。在数据采集的过程中,GPS 基站和无人机同时在接收卫星信号。轨迹解算的目的,是利用GPS 基站的差分数据对无人机接收的卫星定位数据进行改正,获取高精度的飞机位置轨迹。
2)点云解算。基于高精度的无人机轨迹文件,将雷达数据进行解算。根据轨迹文件提供的高精度位置信息,结合激光雷达获取的距离、角度等信息,联合结算高精度高密度的点云数据。
2.6 精度分析
将采集的检查点输入到点云数据之中,查看检查点和点云数据的重合度,并且对点云数据进行剖切,比较检查点和点云的差距。检查点和点云数据重叠,说明点云数据满足精度要求。另外,需要从点云中提取一些坐标点,根据平面坐标放样到实地中去,再测量实地中点位的高程值,查看其与点云中高程值的差距。经检查数据点位中误差均小于2 cm,符合工程精度要求。
2.7 精准验量
外业点云数据采集完毕之后,即可转移到内业进行采剥量计算。基于点云数据进行采剥量计算,将三维点云数据进行过滤,减少噪点,处理后的点云数据使用三维可视化的算量工具进行拟合与构网,建立采剥三角网格模型,并利用网格模型进行工程量计算。通过多期数据进行差值计算,对比分析矿区的采剥量,输出采剥量差值报告。计算采剥量,必须有两期数据,即需要两期数据在同一环境下进行叠加,然后进行比较,最终得到该区域的填挖方量结果:挖方量为4 560 702.67 m3,填方量为10 395.1 m3,净开挖4 550 307.57 m3。
利用三维激光获取的点云数据建立三维模型,可以很方便地计算出所选区域的体积,并且计算的精度高、速度快[8]。
3 结语
介绍了露天矿智能测绘与精准算量技术在芒来露天矿的应用露天矿智能测绘与精准计量体系的建立,有利于露天矿使用无人机开展相关工作,解决露天矿实际生产中的困难,指导露天矿生产活动。露天矿智能测绘和精准计量系统的应用,极大提高了生产效率、降低人员安全风险、提高成果精度、可以在实现成果多样性、直观性的同时,减少生产浪费。在三维空间平台基础上进行矿区建模、采剥量计算,使计算结果直观、准确,实现从传统表格记录测量点的方式向三维模型存储测量数据的方式转变。提高测绘计量获取数据的智能化水平,实现数据的智能、全面化采集,提高数据的利用率。
