城市低空空域可用空间识别与容量评估——以北京市为例
2021-08-03李玲玲韩瑞玲张晓燕
李玲玲,韩瑞玲,*,张晓燕
(1.河北师范大学资源与环境科学学院,石家庄 050024;2.河北师范大学家政学院,石家庄 050024)
低空空域,指地球表面以上可供通用航空器飞行的真高1 000 m(含)以下的空气空间[1],是空域的重要组成部分[2],也是国家重要的战略资源[3]。低空空域容量,指在单位时间内能安全容纳航空器架次的最大数量[4],也称低空空域空中交通服务量。2010年中国低空空域管理开始改革,通过逐步扩大低空空域上限[5]以保障低空空域资源开发利用和通用航空产业发展。2010—2014年在中国低空空域管制区33%的试点范围开放了真高1 000 m以下低空空域,允许通用航空器飞行,并规定该范围可实行动态管理、灵活使用。2015年后,低空空域管理改革在全国铺开,全面开放低空管制区,允许私人飞机经申请后使用1 000 m以下空域。
中国低空空域开放总量相对较小、上限低,管制相对严格[6]。按照国际民航组织(International Civil Aviation Organization,ICAO)的空域分类标准,低空空域是除A类(6 000 m以上绝对管制区)、B(6 000 m及以下绝对管制区)、C类(进近管制区)、D类(机场塔台管制区)等公共运输航空主要使用的空域,以及特殊用途空域(如军航训练空域、空中禁区、限制区和危险区)之外的所有空域;通常又可以按照限制等级和服务类型细分为E类、F类(均为较低管制空域)与G类(非管制空域)[7],其中F类空域多执行仪表飞行规则(instrument flight rules,IFR),一般用于高空飞行和恶劣天气飞行;E类或G类空域则执行目视飞行规则(visual flight rules,VFR)[8]。目前,国际层面上尚未对低空空域的范围确立统一标准,ICAO以及各国对于低空空域划设的上限也不尽相同,大多数发达国家都将商业运输飞行最低巡航高度层之下的空域划定为实施VFR的低空空域,即无需管制许可就能飞行[7]。目前,中国低空空域范围划分不存在非管制区域,没有涉及通用航空飞行的E或G类空域;且飞行上限1 000 m的范围相对于国内巨大的通用航空市场而言,低空空域容量明显不足;空域整体上实行军民航飞行和空中交通管制部门按照航路、航线需求进行模糊化统一管理方法,按照《通用航空飞行管制条例》规定,低空空域因总体上属于管制区导致通用航空飞行审批程序复杂严格;通用航空飞行的申请归口不统一,或为军航飞行管制部门,或为民航飞行管制部门,使得通用航空飞行与军民用机场的进离场、训练飞行相冲突,难以统一协调放行机制。
目前,无人机作为通用航空产业的重要运行工具、城市低空空域的主要使用者[9],随着城市低空空域交通流量不断增长,使得其与有限的城市低空空域容量之间的矛盾不断显现继而影响飞行安全并产生因飞行器碰撞或坠落造成经济损失[10],直接影响了低空交通需求与无人机飞行安全。截至2019年底,全行业无人机拥有者注册用户37.1万个,注册无人机39.2万架,参与民航局无人机云交换系统的无人机飞行活动125万h,较2018年增长了238%。无人机活动普遍具有机动灵活性、飞行范围广泛等特点[11],也增加了城市低空空域容量评估难度。因此,实施空中交通流量管理(air traffic flow management,ATFM),合理安排飞行流量,是解决城市低空空域交通拥挤的有效方法。而科学高效地评估城市低空空域容量,是实施空中交通流量管理策略的重要基础[12]。
对城市低空空域容量评估首先应开展城市低空空域可用空间识别,并根据空域特征进行有效飞行。近年来,学者们关注空域容量研究问题主要集中于空中交通的核心要塞和交通密度最大区域——民航机场终端区空域,特别是机场跑道区空域,并逐渐扩大至终端区所在的区域管制空域[13]。具体评估过程中,学者们充分考虑了多种影响因素的选择和使用,如考虑机场终端区系统自身复杂性和评估风险要素[14]、人为因素[15]、航班排队特征[16]、控制通信的统计特性[17]、环境条件[18]等,以最大程度精确空域容量的动态化计算与模拟。此外,对机场终端区之外的空域容量评估以航路汇聚点或节点为核心展开,通过研究航路时空拥堵状况确定空域容量[19]。迄今为止,中国学者对于城市低空空域容量评估研究甚少,已有的少数国外研究主要集中于无人机城市交通管理系统的建立,从理论上寻找无人机在城市内的最优轨迹[20]、建立安全有效的无人机低空航路[21];关于低空空域容量评估方法的尝试主要以计算无人机数量阈值为主[22-23]。随着中国低空空域的逐步放开,以及通用航空产业大放异彩,亟需开展低空空域容量的深层次研究。首先对城市低空空域容量评估的关键问题进行了梳理,分别从可用空间识别、结构特征、无人机碰撞风险3个角度进行城市低空空域容量判定的约束。接着以北京市为例,对其城市内部核心区域的低空空域容量进行模拟评估。合理有效地评估城市低空空域容量,是优化空域资源利用、提高通用航空产业经济效益的重要手段。
1 城市低空空域容量评估的关键问题
1.1 城市低空空域可用空间识别
低空障碍物及其间隔标准是城市低空空域可用空间判定的重要依据。低空障碍物分为动态障碍物和静态障碍物,前者包括飞行中的鸟类和其他飞行器;后者包括建筑物等空间地形复杂性、人造障碍物和山丘树木等天然障碍物,是城市低空空域空间可用与否的主要约束条件。城市低空空域因近邻地表,受低空障碍物及其间隔标准影响,被划分为可用空间与不可用空间。其中,可用空间指没有障碍物且不受地理环境影响的空域,不可用空间指受到障碍物或地理环境影响变得不可使用的空域[24]。在相同的飞行高度和空中交通流量条件下,低空障碍物复杂地区的低空空域可用空间小于低空障碍物简单地区。许多国家通过设置低空障碍物间隔标准,限制无人机与地面障碍物的最小距离以保证其在城市低空空域内安全运行,如澳大利亚、加拿大、日本、中国香港均设定为30 m,英国设定为50 m,新加坡设定为60 m。
1.2 城市低空空域结构特征分析
城市低空空域结构是影响城市低空空域容量的重要因素[25]。城市低空空域结构限制了无人机在空域内部运行的飞行高度、方向和速度,导致不同空域结构的运行效率差异,从而影响了城市低空空域容量。城市低空空域结构主要包括4种[26]。
(1)无结构,也称混合飞行结构空域,在该结构下运行的无人机只受天气、静止障碍物和地形等物理约束,以最佳飞行高度和速度,使用“起点→目的地”的直接路径运行(图1),但该结构内部飞行方式复杂,安全性较低。
(2)层结构,通过限制无人机飞行高度将城市低空空域分割成高度差为100 m的水平多层带状堆叠结构(图1)。无人机根据其飞行需求选择相应的飞行高度层,飞行距离越长,选择的飞行高度层越高。层结构降低了结构内部飞行方式的复杂性,具有一定安全性。
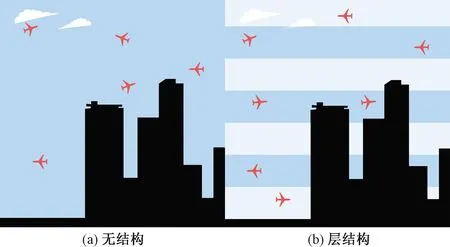
据参考文献[26]改绘
(3)块结构,即在保留层结构高度限制的基础上,充分考虑城市布局影响。以城市中心为圆心,将每层城市低空空域层结构分割成放射状区域,进一步将城市低空空域划分为限制飞行高度和方向的块状结构(图2)。块结构可以最大化发挥无人机飞行方向与飞行高度的组合优势,使其飞行路径尽可能优化。

据参考文献[26]改绘
(4)管结构,即通过预先规划的无冲突路线建立包括起点、终点、高度、时间要素的四维管道(图3),对无人机飞行高度、方向和速度进行限制,提供城市低空空域飞行固定航线。航线以节点(一个或多个路由的连接点)相连,边是连接两个节点的连线(飞行航路),处于同一高度的航线除节点外没有其他交叉点。管结构最大程度保证了城市低空空域内部的安全性,但由于限制严格,降低了无人机飞行效率。

图3 管结构示意图(据参考文献[26]改绘)
上述4种城市低空空域结构旨在降低空域内部交通流的复杂性[27],以达到安全飞行目的,但过多的限制条件导致城市低空空域容量降低。进一步验证表明:层结构在不过分影响无人机运行效率的情况下协助其分道而行,安全性和城市低空空域容量最高,是最优城市低空空域结构,无结构因飞行方式复杂导致安全性最低,块结构和管结构因限制严格导致城市低空空域容量最低[28]。
1.3 城市低空空域碰撞风险界定
城市低空空域碰撞风险指空域内两架运行中的无人机进入彼此之间的距离小于特定间隔的概率[29],是考虑了飞行安全上的城市低空空域容量评估约束条件。城市低空空域碰撞风险因无人机自由飞行[30]、按需飞行[31]、无序飞行等活动灵活特性而增加,所以被视为城市低空空域容量评估的重要影响因子。当城市低空空域内无人机碰撞风险小于最低安全事故率时,则证明该城市低空空域处于安全状态,再根据具体飞行环境及时间评估基于安全碰撞风险的城市低空空域容量。
2 研究方法与数据来源
由于中国并未对城市低空空域进行结构性管理,因此本文主要考虑低空障碍物与间隔标准、碰撞风险2个问题进行城市低空空域可用空间识别与容量评估。
2.1 地理围栏技术
城市低空空域可用空间识别主要采用地理围栏(geofence)技术,是基于位置服务(location based service,LBS)使用虚拟围栏来表示虚拟地理边界的技术。该技术在无人机等移动设备装置内嵌,当设备靠近地理围栏时会自动推送地理围栏信息[32],目前已广泛应用于广告[33]、交通信息[34]等多种服务领域,并可轻松实现服务、通知、预警等信息推送。在城市低空空域应用中,地理围栏技术利用经度、纬度、高度数据定义无人机运行的三维空间边界[35],并设置禁止飞出(keep-in)和禁止飞入(keep-out)[36]两种许可类型的地理围栏(图4),分别用来确定无人机可飞区和禁飞区的三维虚拟边界。地理围栏技术既能对单一架次无人机进行约束,也允许多机同时获得地理围栏[37],其应用可实现对城市低空空域无人机飞行的有效监管。
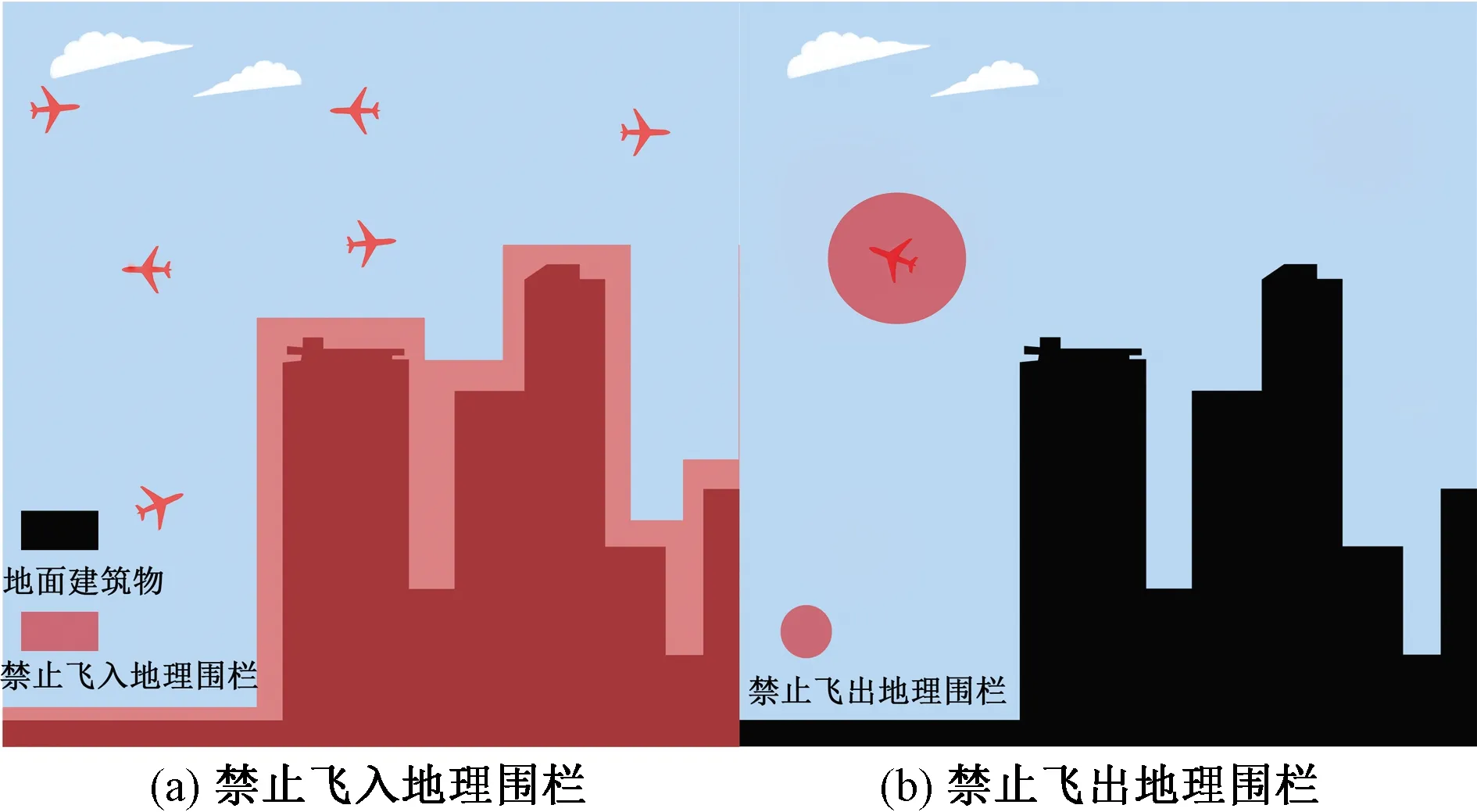
图4 禁止飞入地理围栏与禁止飞出地理围栏示意图
在城市低空空域可用空间识别中,keep-out地理围栏是在低空障碍物周围建立的一个大小为δm的缓冲区(无人机与低空障碍物的间隔标准),用来表示包含低空障碍物的虚拟地理边界;keep-in地理围栏是在无人机周围利用通过alpha形状理论[38]建立一个半径为r(m)的α球(无人机之间的间隔标准),用来表示包含无人机的虚拟地理边界(图4)。将城市低空空域以米为单位离散为Nx×Ny×Nz三维规则笛卡尔网格,且Γ={glmn:1≤l≤Nx,1≤m≤Ny,1≤n≤Nz},其中Γ表示包含所有长、宽、高分别为l、m、n的glmn笛卡尔网格集合,用来模拟被不同类型的地理围栏定义后的低空空域。当glmn网格被低空障碍物占据时称为占领,当glmn网格被keep-out地理围栏或keep-in地理围栏占用而不可用时称为封闭,既未被占领也未被封闭的glmn网格即为无人机可用空间。首先对离散空域进行判定,即
(1)
(2)
式(2)中:U(h;δ,r)为空域可用空间比例,表示空域可用空间的使用程度。V(h;δ,r)表示城市低空空域可用空间总量(m3),具体计算公式为
V(h;δ,r)=∑cell(glmn;δ,r), 1≤l≤Nx,
1≤m≤Ny, 1≤n≤Nz
(3)
式(3)中:h表示无人机飞行高度,m。
2.2 冲突检测与解决模型
冲突检测与解决(conflict detection and resolution modeling methods, CD&R算法)建模方法是针对无人机的飞行速度与方向建立的碰撞风险计算模型,通过分析无人机飞行安全指标[22]进行城市低空空域容量评估。CD&R算法定义了一个任何无人机都应该远离另一无人机外围的最小隔离区域Z(半径为r、高度为h的圆柱体)(图5),第一个无人机X进入第二个无人机X0的最小隔离区域Z的概率为碰撞风险(z),即X移动至X′后则具有碰撞风险[23]。

图5 CD&R算法最小隔离区域Z示意图
在碰撞风险的计算中,安全指标主要表现为无人机飞行过程中可接受的安全间隔,其最小极限值是0.001 km[39]。不同飞行速度与方向下无人机的碰撞风险z为
(4)
式(4)中:N为无人机数量,架次;R为最小安全间隔,km;V(h;δ,r)为被评估城市低空空域可用空间总量,km3;t为统计时间内所有无人机飞行总时间,h;α为飞行方向,(°);ω为无人机飞行速度,km/h。一次碰撞视为2次飞行事故,根据式(3)得到基于碰撞风险的城市低空空域容量S(架次/h)为

(5)
式(5)中:v为无人机飞行体积,km3;T为被评估时间,h。
2.3 数据来源与指标选择
基于数据可获取性以及结果可视化原则,选择北京市35 km×30 km范围的主城区为研究区域,具体经纬位置为39.76°N~40.04°N、116.16°E~116.57°E(图6),数据来源于中国科学院资源环境数据云平台。该区域具有城市多用途开发的典型性,城市用地包含商业、住宅等多种类型建筑用地,以及城市公园绿地等公共服务用地,是研究城市内部低空空域容量差异的理想区域。对所选区域1 000 m以下空域离散为单位为1 m的三维规则网格,得到35 000×30 000×1 000的笛卡尔网格,利用地理围栏技术进行其城市区域真实三维可用空间识别。北京市主城区低空空域容量评估所需指标有3个,包括被评估城市低空空域体积、碰撞风险以及无人机体积。被评估低空空域体积指标数据来源于式(2)结果,即选取35 km×30 km×1 km范围内所有计算所得城市低空空域可用空间;碰撞风险指标以ICAO设定的低空空域最低安全事故率(1.5×10-8起事故/飞行小时)为基准,通过比较城市低空空域内无人机碰撞风险(架次/h,一次碰撞被认定为发生了2架次通用航空器损毁,即2起事故)与城市低空空域最低安全事故率的关系而确定空域容量状况;无人机体积指标选取消费级无人机中市场份额最高的无人机型号[40]——Phantom3作为评估依据,其体积为0.08 m3。

图6 研究区概况
3 结果分析
3.1 基于地理围栏技术的城市低空空域可用空间使用比例模拟结果分析
通过北京市低空空域可用空间比例U(h;δ,r)随h、δ、r变化关系发现,地理围栏技术具有城市低空空域容量评估的有效性,keep-out、keep-in地理围栏模拟结果有差异。具体看,keep-out、keep-in地理围栏模拟的空域可用空间比例分别在[72%,100%][83%,100%]区间范围内(图7),两种地理围栏模拟结果在飞行高度h≤40 m时,低空空域可用空间比例随着飞行高度增加持续增加;h≥40 m时,低空空域可用空间比例随着飞行高度增长幅度明显减小。如keep-out地理围栏的模拟结果为,当h=20 m时,U(h;50,0)、U(h;40,0)、U(h;30,0)、U(h;20,0)、U(h;10,0)5种条件下的低空空域可用空间比例分别为72.11%、75.51%、79.46%、84.18%、89.99%;当h=40 m时,5种条件的低空空域可用空间比例分别为85.65%、87.93%、90.41%、93.14%、95.96%;;当h=100 m时,5种条件的低空空域总体可用性为98.71%、98.98%、99.23%、99.47%、99.69%。

图7 北京市低空空域可用空间使用比例
使用keep-out地理围栏和keep-in地理围栏进行城市低空空域可用空间比例模拟结果的评价效果存有差异。keep-out地理围栏的评估结果层级递进性更突出,但实测空域比较分散,空域容量损失率高;keep-in地理围栏的评估结果精确度更高,识别狭小地理环境的能力更强,因而实测空域可用空间比例较大。主要因为keep-in地理围栏建立的α球可有效识别、保留并连接了多条狭小走廊区域,使得其评估生成的空域容量更具连贯性,即使在最小间距为20 m或更低的海拔区域同样可以支持无人机通行。
3.2 城市低空空域可用空间总量评估结果分析
北京市低空空域可用空间总量受到低空障碍物间隔标准与飞行高度的共同影响,随飞行高度增加而增加。具体低空空域可用空间总量以δ=30 m、r=50 m和δ=50 m、r=50 m两种情况展开计算。城市低空空域可用空间V(h;δ,r)随h、δ、r变化的关系研究结果表明:
(1)城市低空空域可用空间受低空障碍物间隔标准δ影响,间隔标准越小,城市低空空域可用空间总量较大(图8),即当δ=30 m时,城市低空空域能够同时容纳无人机数量要大于δ=50 m,且飞行高度越低,此影响越大。

图8 北京市主城区低空空域可用空间随高度变化图
(2)城市低空空域可用空间总量随飞行高度增加而增加,即当h=20 m时,δ=30 m与δ=50 m的城市低空空域可用空间总量分别为834.33 km3和757.12 km3,占实测总空域的比例为79.5%和72.1%;h=100 m时,δ=30 m与δ=50 m的城市低空空域可用空间总量分别为1 041.91 km3和1 036.50 km3,分别占实测总空域的99.2%和98.7%。
北京市低空空域可用空间主要集中于城市交通干线,并呈现圈层式分布。通过分析城市低空空域可用空间总量随高度变化分布情况(图9)可以发现:

图9 北京市主城区低空空域可用空间总量随高度变化分布图
(1)城市低空空域可用空间沿城市交通干线分布,当飞行高度h=20 m时,沿城市交通干线分布情况最为显著;h=40 m时也较为明显。但随着飞行高度的增加,低空空域可用空间沿城市交通干线分布的趋势相对减弱。
(2)城市低空空域可用空间由中心向外围呈现圈层式分布,当飞行高度h=20 m时,城市低空空域可用空间集中于二环至五环之间,以及五环外围,二环内区域的可用空间相对较分散;随着飞行高度的增加,尤其在h=40、60、80 m时,城市低空空域可用空间逐步向城市二环外的区域聚集并逐步扩大,并在北京市主城区的东南和西北部高度集聚,主要因为东南地区主要分布有跨国公司总部,高层建筑少;西北区域多山脉,景区分布较多。当飞行高度h=120 m时,北京市主城区低空空域可用空间与城市外围差别逐步弱化。
3.3 城市低空空域容量评估结果分析
北京市主城区与不同功能区的低空空域容量有差异。北京市主城区35 km×30 km范围的低空空域容量为678架次/h。进一步,对北京市主城区内居住区、商业区、生态服务区3种不同类型功能区各选取3 km×4 km的城市低空空域容量进行了评估分析。功能区选取标准参考《城市用地分类与规划建设用地标准》和《土地利用现状分类》,具体选取商业区范围为116.26°E~116.28°E,39.53°N~39.55°N,居住区范围为116.23°E~116.25°E,39.48°N~39.50°N,生态服务区范围为116.22°E~116.24°E,40.00°N~40.02°N(图6)。结果显示,3种功能区城市低空空域容量由大到小依次为生态服务区8架次/h,居住区7架次/h,商业区5架次/h。该结果也反映了3类区域的开发差异性。生态服务区主要作为北京市的绿化屏障和重要水资源涵养区,为限制高强度工业开发区域,平均海拔21.13 m[图10(a)],主要以环境优势培育绿色休闲产业,因此低空空域净空范围较大。居住区的开发强度相对较高,是北京市相对重点开发区域,承载了北京最多人口,是商业和高端产业发展的主要区域,该区域内主要为民居楼宇,平均海拔31.85 m[图10(b)]。商业区由于区域开发强度高,综合实力强,区域内金融服务业、国家化商区分布密集,是北京国际化形象的主要代表区域,高层建筑密集且平均海拔93.55 m[图10(c)],因此城市低空空域容量较低。3类区域的定位和发展要求不同,在保证区域活力的同时进行差异化区域格局构建,并尽力通过对空间的有序开发达到区域空间均衡。但是反映到空域上,空间均衡体现相对不明显。此处也正是地理学与空域学的和而不同之处,空域更具有空间连续性表征,但却需要借助地理要素的非均衡性充分反映。
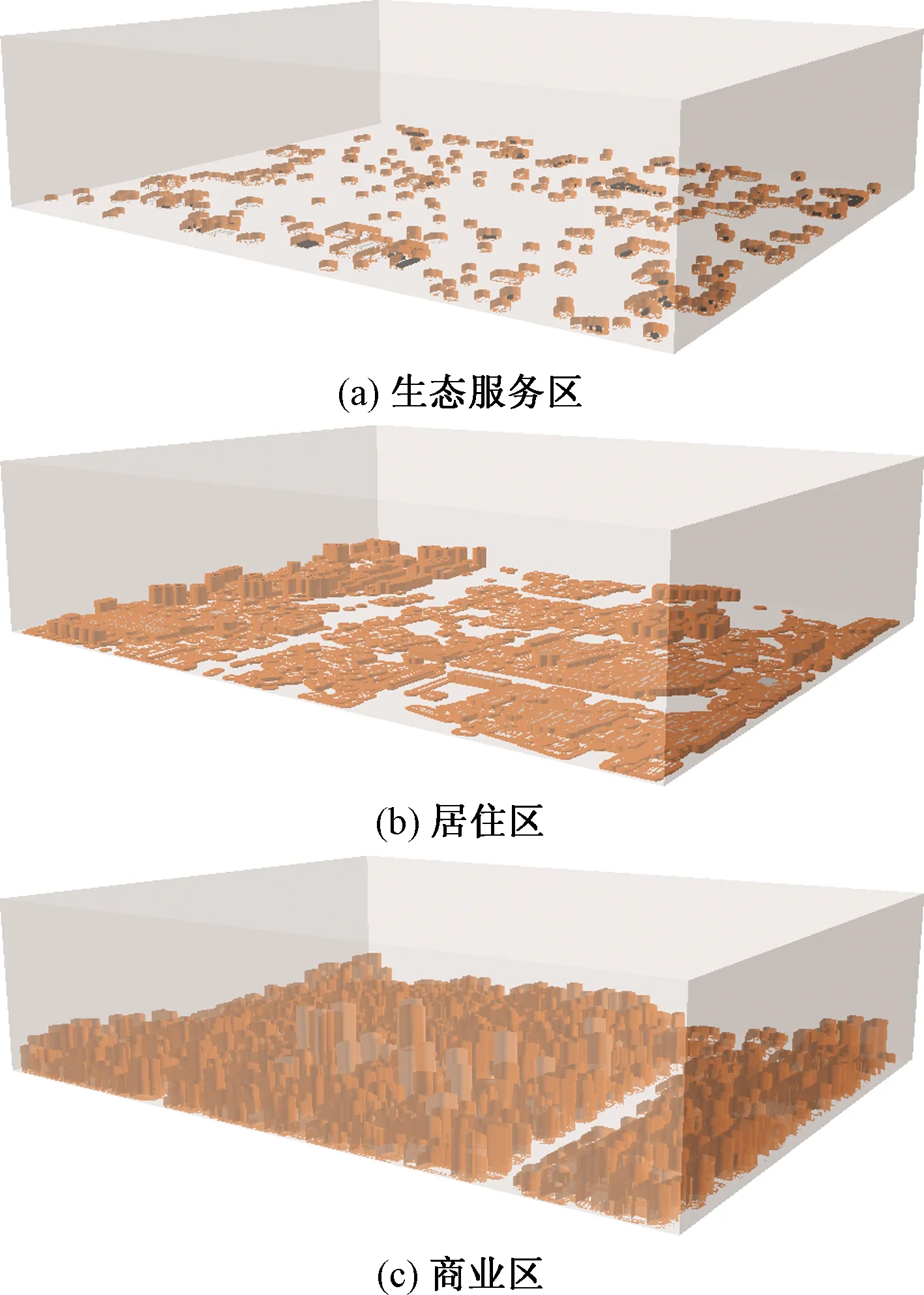
图10 北京市不同功能区低空空域容量示意图
4 结论
分析梳理了城市低空空域容量评估的3个关键问题,并以北京市主城区为例,使用地理围栏技术和CD&R模型对其城市低空空域可用空间和空域容量分别进行了识别和评估。研究发现:
(1)地理围栏技术具有城市低空空域容量评估的有效性,keep-out、keep-in地理围栏模拟的空域可用空间比例分别在[72%,100%][83%,100%]区间范围内,两种地理围栏模拟结果在飞行高度h≤40 m时,空域可用空间比例随着飞行高度增加持续增加;h≥40 m时,空域可用空间比例随着飞行高度增长幅度明显减小。keep-out地理围栏的评估结果层级递进性更突出,但实测空域比较分散,空域损失率高;keep-in地理围栏的评估结果精确度更高,识别狭小地理环境的能力更强,实测空域可用空间比例较大。
(2)北京市低空空域可用空间总量受到低空障碍物间隔标准与飞行高度的共同影响,随飞行高度增加而增加。城市低空空域可用空间沿城市交通干线分布,且飞行高度越低表现越明显;可用空间由中心向外围呈现圈层式分布,且主城区东南区和西北部的低空空域可用空间最大;当飞行高度超过120 m时,北京市主城区低空空域可用空间与城市外围差别逐步弱化。
(3)北京市主城区35 km×30 km范围的低空空域容量为678架次/h。北京市3种功能区3 km×4 km低空空域容量由大到小依次排列为生态服务区8架次/h,居住区7架次/h,商业区5架次/h,反映出空域更具有空间连续性表征,但却可以借助地理要素的非均衡性充分反映。
低空空域容量评估是地理学与空域学交叉的研究议题。一方面,低空空域作为一种有限的自然资源,其容量评估也是地理学有关资源及其空间研究的重要组成部分。低空空域容量评估研究既包含对低空空域空间可用性的判断,也确定了无人机的具体飞行空间和容量大小。目前,低空空域容量评估研究还处于探索阶段,其理论研究与方法研究还未形成体系,通过引入地理学的方法与技术,不仅丰富了低空空域容量评估的方法与内涵,增加低空空域容量评估的多样性;也拓展了地理学研究空间与应用领域,从传统的陆域研究向空域深入。另一方面,低空空域容量评估受低空复杂地理环境的直接影响,其评估过程中必须考虑地理要素的影响,使用地理学方法与视角,更充分判定低空空域的可用空间,进一步弱化空域空间边界的模糊性,对有效统筹地理条件与空域开发的资源价值、揭示空域形态特征,以及改善宏观的低空空域资源利用与管理具有重要意义。
在进行低空空域运行容量评估时进行了单一条件下的理论模拟,未考虑无人机运行动态因素的实时变化,未来将细化地理环境条件影响,并进一步开展低空空域容量的深入模拟评估。
