基于PID控制的跑步机器人控制算法研究与分析*
2021-08-01苟小平张万军张景轩张景怡张景妍
苟小平,张万军,张 峰,张景轩,张景怡,张景妍
(1.陇东学院体育学院,甘肃 庆阳 745000;2.甘肃泽德电子技术有限公司,甘肃 天水 741003;3.兰州工业化设备有限公司,甘肃兰州 730050)
1 问题的提出
如何提高学生参加长跑锻炼的兴趣,有效提高他们的耐力素质,是体育工作者不断探索的重要问题[1-4]。近年来,有学者苟小平、张万军[5-22]等的研究重点集中在体育产品研制及插补曲线的应用上[23-29]。
本文提出了一种基于PID 控制的跑步机器人控制算法,基于关节角度误差参数及运行误差的变化机器人。结合实际运行经验,建立了模糊规则表,PID 参数自整定在线仿真。实验结果表明:PID 控制方法具有良好的控制效果,能够使跑步机器人平稳地运动,实现对步态跑步机器人的初始控制。
2 跑步机器人PID 控制算法设计
考虑到机械腿的电机和执行机构在传递过程中不可避免的误差,机器人系统增加了编码器,实时采集关节的角度信息,并反馈给控制器。通过控制器的计算,可以实时减小误差引起的实际步态与理论步态的差异。模糊PID 控制系统结构如图1 所示。
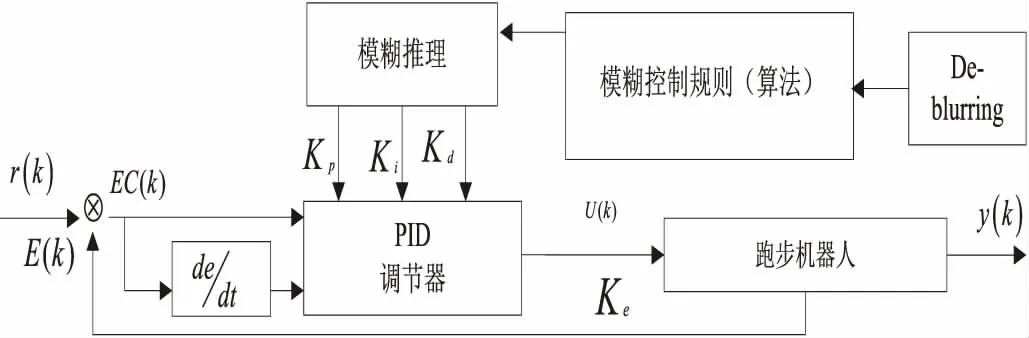
图1 模糊PID 控制系统结构框图
3 模糊规则表的建立
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到分别设置KP,Ki和Kd三个参数的模糊规则表[8],见表1。
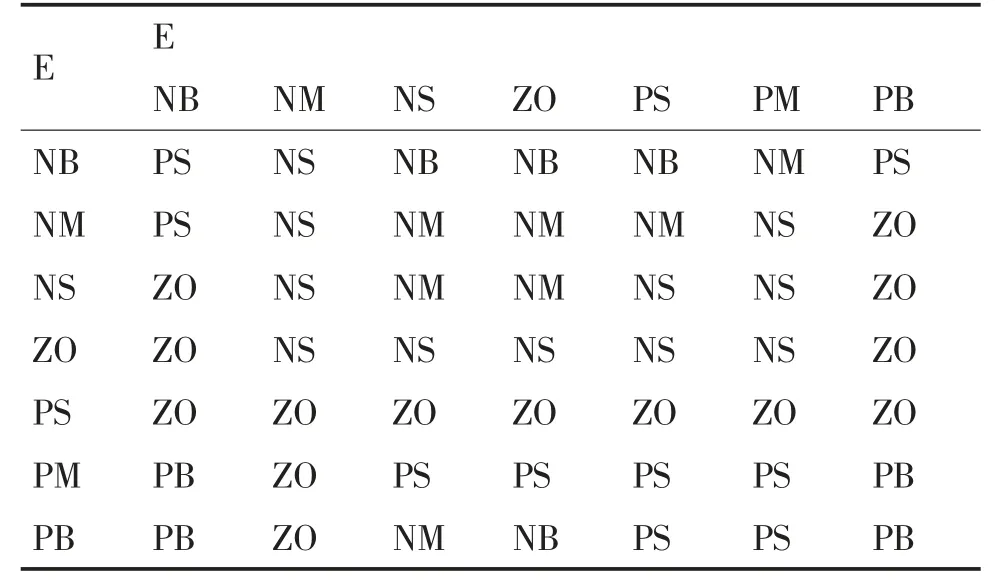
表1 KP,Ki 和Kd 模糊控制规则表
4 去模糊
根据e(k)和△e(k)的隶属函数,当输入值为常数时,本研究需要找到一个最能代表模糊集的精确量。这里作者用重心法来表示这个精确值[9]:

在公式:Qi-模糊变量值,Ui—模糊变量值对应的隶属度。

每个PID 参数的精确值可从式(2)中获得。
5 跑步机器人控制算法测试平台介绍
跑步机器人控制算法测试的实验地点为陇东学院体育学院,陇东学院体育学院室内温度为25~35℃。图2 为跑步机器人控制算法测试平台器。

图2 跑步机器人控制算法测试平台
6 结果与分析
使用MATLAB 软件对跑步机器人控制算法进行仿真,分别做出PID 控制、常规PID 控制等试验模拟图,如图3 和图4 所示。本试验的目的是验证上述控制方法的分析误差。
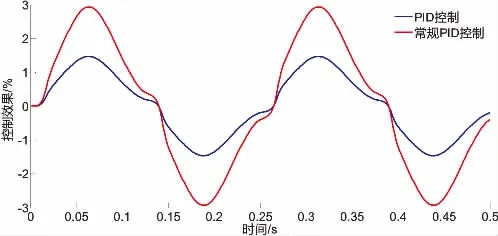
图3 试验模拟图1
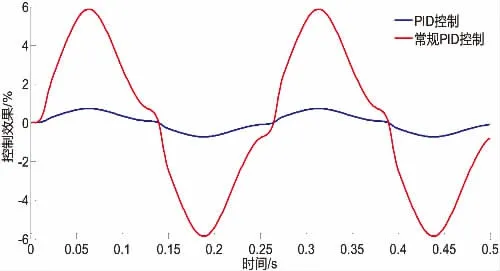
图4 试验模拟图2
从图3 可以看出:PID 控制方法具有良好的控制效果,能够使跑步机器人平稳地运动,实现对步态跑步机器人的初始控制。
从图4 可以看出:PID 控制方法具有良好的控制效果,能够使跑步机器人平稳地运动,实现对步态跑步机器人的初始控制。
