楼梯清洁机器人的结构设计
2021-07-30赵世泽李尚艺
王 会,赵世泽,李尚艺
(德州学院 能源与机械学院,山东 德州 253023)
0 引言
随着科学技术的发展和人们生活水平的提高,城市之中不论是办公大楼还是住宅小区都是高层楼房,虽然有便利的电梯,但普通楼梯也是高楼必不可少的部分。虽然普通楼梯很少使用,但时间一长也会存有垃圾和灰尘,需要对其及时清扫。目前,打扫楼梯的方式还只能依靠清洁工人人工打扫,需要较多人力和较长时间的清扫,也是对人力资源的浪费。因此,为了完成这项简单且重复的工作,节约人力资源,需要对梯楼清洁机器人进行研究。本文主要针对其机械结构进行设计,此机器人能自动清洁楼梯,无需太多人工操作,省时又省力。
1 楼梯清洁机器人的设计
1.1 我国建筑楼梯台阶的标准尺寸
我国建筑楼梯设计规范中指出楼梯的踏步尺寸一般应与人脚尺寸步幅相适应,同时还与不同类型建筑中的使用功能有关,踏步的尺寸包括踏步高度和踏步宽度。我国公共建筑楼梯要求及标准如下:
(1) 室内楼梯的每梯段净宽不应小于1.4 m,踏步高度不应大于0.16 m,踏步宽度不应小于0.28 m。
(2) 室外台阶的踏步高度不应大于0.15 m,踏步宽度不应小于0.3 m。
(3) 旅客地道、天桥阶梯踏步高度不应大于0.14 m,踏步宽度不宜小于0.32 m,直跑阶梯的宽度不宜小于1.5 m。
1.2 楼梯清洁机器人总体方案设计
楼梯清洁机器人的总体结构如图1所示。整机主要由机架、前进装置、上下楼梯装置、清洗装置等部分组成。其工作原理是:清洁机器人在后轮电机1的带动下使车轮前进;当遇到台阶时电机2启动带动后驱动轴转动,通过上下楼梯装置使机器进入上一层楼梯;然后在电机3的带动下使清洁装置工作,进而实现对楼梯的全面清洁。其三大组成部分的工作过程如下:
(1) 前进装置:在电机1的带动下后车轮运动,使楼梯清洁机器人往前运动。
(2) 上下楼梯装置:上下楼时电机2通过齿轮传动带动后驱动轴转动,经过链传动带动前驱动轴转动。两个驱动轴末端有两个撑杆,随着轴的转动进而把机器撑起实现上楼梯。
(3) 清洗装置:在曲柄滑块机构的滑块处有清洁刷,在电机3的带动下使曲柄滑块机构运转,从而带动清洁刷左右运动,进而实现对楼梯的全面清洁。在滑块机构下方有丝杠机构,若楼梯略有区别时可以通过调节丝杆机构来调节刷子位置,使其使用范围更加广泛。
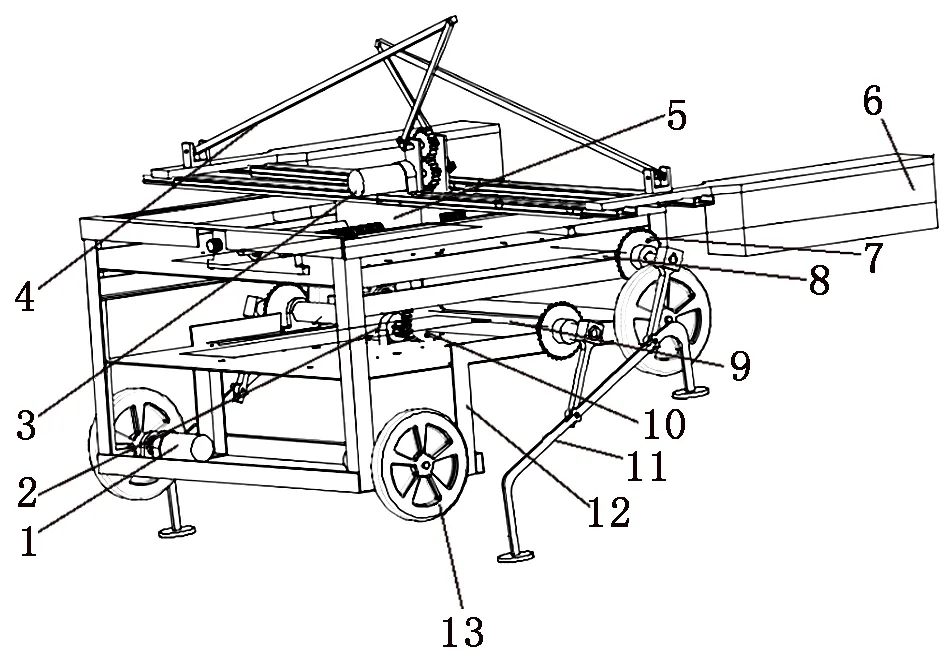
1,2,3-电机;4-曲柄滑块机构;5-丝杠机构;6-清洗刷子机构;7-链轮;8-前驱动轴;9-后驱动轴;10-大齿轮;11-上下楼机构;12-车架;13-车轮
1.3 传动装置的设计
1.3.1 传动方案的设计
楼梯清洁机器人的传动方案如图2所示。
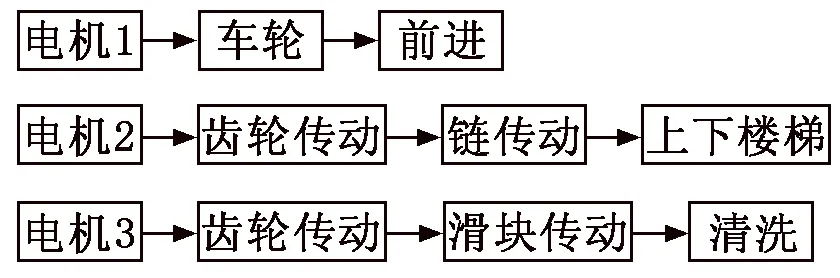
图2 楼梯清洁机器人的传动方案
1.3.2 电动机的选择
(1) 电动机1的选择。机器人行进速度设定为v=0.018 m/s,车轮直径D=140 mm,则电动机转速为:

通过网上查询电机,选取60KTYZ永磁同步电机齿轮减速电动机可满足要求。
(2) 电动机2的选择。清洁机器人的链轮转速为5 r/min,电机经齿轮传动到链传动传动比i=4,则电机转速为n=20 r/min。经查询,选取25 W、220 V交流齿轮调速电机/减速电机4RK25RGN-C马达普菲德电机可满足要求。
(3) 电动机3的选择。丝杠带动滑块机构工作速度设定为v1=0.05 m/s,通过网上查询电机,选取60KTYZ永磁同步电机齿轮减速电动机可满足要求。
1.3.3 齿轮传动的选用
选用标准直齿圆柱齿轮传动,传动比为4。因实际的工作方式为速度不高的间歇性工作,所以齿轮精度选用7级。选择小齿轮的材料为40Cr调质处理;大齿轮的材料选用45钢调质处理,大小齿轮的硬度差保持在45HBS上下。选择小齿轮齿数z1=18、大齿轮齿数z2=18×4=72,两齿轮模数m=1.5 mm。
1.3.4 链传动的选择
选用链条型号04C-1,大链轮齿数Z1=29,小链齿轮数Z2=29,传动比为1,链节数Lp=89,中心距a=188 mm。
1.3.5 后驱动轴的结构设计
为了保证轴的强度,取后驱动轴直径dmin=18 mm。后驱动轴上有一个齿轮、一对链轮和一对轴承,需要选用可靠的定位方式。轴承的配置采用双支点各单向固定;轴承的内圈与轴一同旋转,外圈静止,所以内、外圈均采用过渡配合来实现周向固定。与轴中间相靠的轴承一侧采用轴肩定位、远离轴中间的那一侧选择内置端盖定位以实现轴承的轴向定位。链轮采用平键连接来实现周向定位,平键的失效形式为两个侧面的压溃以及键的剪断;采用套筒实现链轮的轴向固定。齿轮的定位方式可以选用圆螺母和轴肩实现轴向定位,周向定位则选择平键连接。
轴承在轴支撑方面起着必不可少的作用。因为轴上安装的是标准直齿圆柱齿轮,没有承受轴向载荷,轴承主要承受径向载荷。因此选用深沟球轴承就能够满足承载要求,且其价格便宜。根据《机械设计手册》查得可使用型号为6208的深沟球轴承,轴承内径为40 mm,外径为80 mm,脂润滑极限转速为800 r/min,油润滑极限转速为10 000 r/min,基本额定动载荷Cr=29.5 kN。
传动轴三维模型如图3所示,前驱动轴设计类似于后驱动轴,故不再赘述。
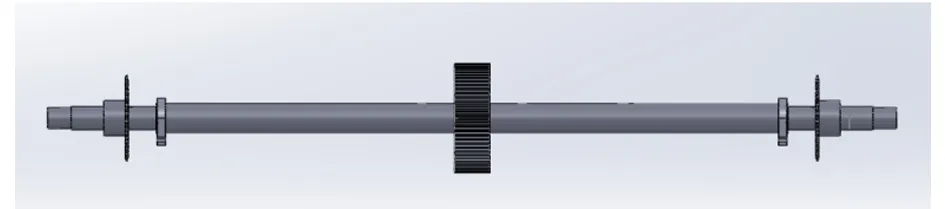
图3 传动轴的三维模型
1.4 清洗装置的设计
清洗装置采用曲柄滑块机构,如图4所示,其三维模型如图5所示。
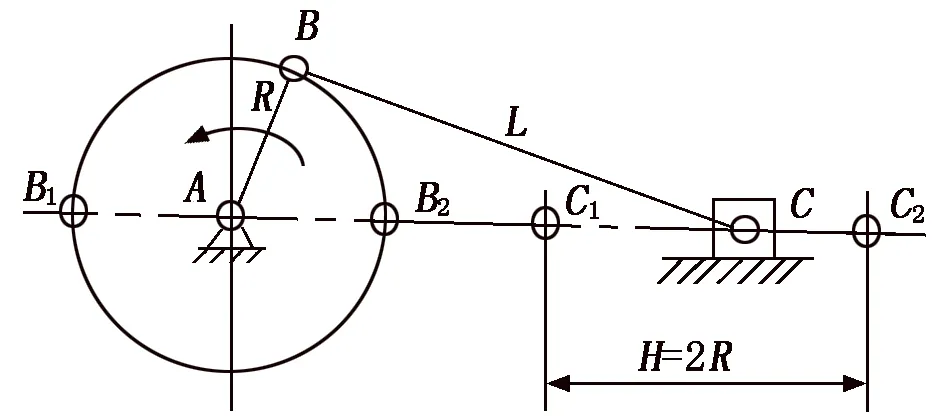
图4 曲柄滑块机构简图
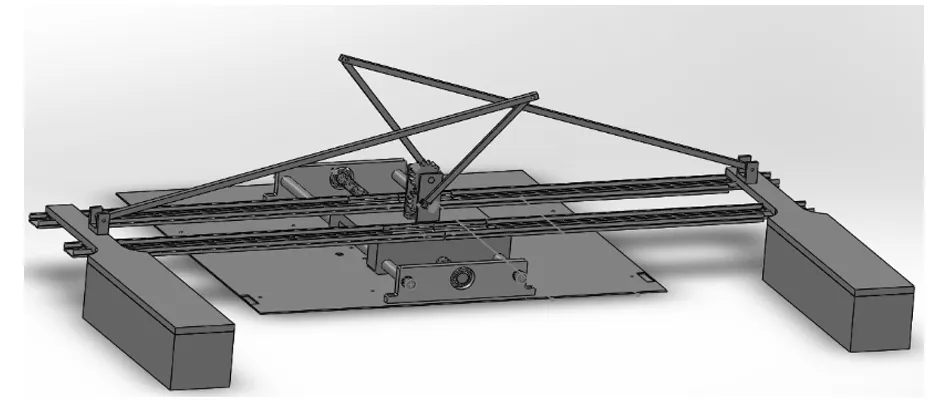
图5 曲柄滑块机构三维模型
如图4所示,设计曲柄滑块的关键是找出曲柄长R、连杆长L满足行程H的关系。H是滑块两个极限位置的距离,是曲柄和连杆两次共线时滑块的位置,所以H=2R。因滑块的行程H近似为楼梯的宽度B,所以R=B/2。这时考虑其他辅助条件,设K=L/R,一般取K=2~5,特取K=3,因此L=3B。
1.5 车架设计
根据我国楼梯建筑的通用标准中室内台阶的高度应小于等于0.16 m,故设计车架下端高为140 mm,以便于卡在台阶上。打扫室外台阶的清洁机器人,可参考室外台阶的标准适当调整尺寸。为了使车体更经久耐用轻便,车架选用铝合金材料。车架结构如图6所示。
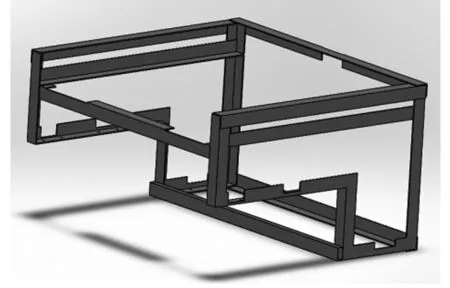
图6 车架机构
1.6 楼梯清洁机器人的装配
楼梯清洁机器人的三维装配图如图7所示。
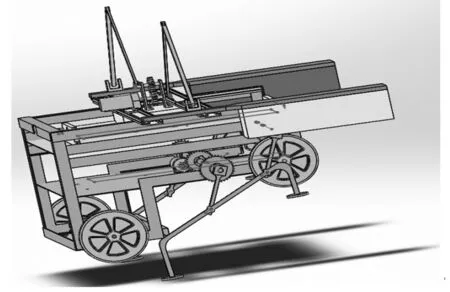
图7 楼梯清洁机器人三维装配图
2 结论
楼梯清洁机器人通过车轮带动机器前行,上楼梯时电机启动经齿轮传动、链传动带动撑杆运动,进而把机器撑起实现上楼。电机带动滑块机构往复运动实现对楼梯平面的清扫,从而实现了楼梯清洁的机械化。这款机器机械化程度高,节省了人力,节约了成本,保证了楼梯的清洁,具有一定的实用价值和市场推广价值。
