形状记忆合金驱动的柔性仿人手设计与分析*
2021-07-30黄东煜林尚灿苏满佳
黄东煜,林尚灿,苏满佳
(广东工业大学 机电工程学院,广东 广州 510006)
0 引言
随着机器人技术的发展,人们对仿人服务型机器人的逼真程度提出了更高的要求。作为服务型机器人的关键执行件,由软材料制作而成的柔性仿人手能在最大程度上模仿人手在受力时的变形,使互动者不会感觉到触碰刚性机械结构时的生冷感[1]。为此,国内外学者尝试用硅胶铸造[2]、3D打印软材料[3]的方式开发绳驱动柔性仿人手。但绳驱动方式要求在仿人手中安装电机,导致结构不够紧凑。
形状记忆合金(SMA)是一种新型智能材料,在受热时能产生很大的收缩应力。将SMA丝嵌入机器人本体中,可以实现驱动器和执行器一体化,提高结构的紧凑性[4]。因此研究人员使用SMA丝替代传统绳驱动方式中的绳索,开发了各种类型的软手指[5-8]。但这些软手指结构复杂,装配困难。针对这些不足,本文提出了一种基于SMA丝驱动的新型柔性仿人手,其软手指通过硅胶铸造的方式一体成型,整体结构简单、紧凑,具有良好的逼真度。
1 仿生设计
人指的指节由坚硬的骨骼和包覆在其周围的软性皮肤层组成,在指节的连接处具有一个转动关节,通过肌丝收缩牵动手指弯曲变形。结合人指的结构特征,根据服务型仿人手的功能要求,本文提出了一种软手指的设计方案。该软手指由坚硬的塑料骨骼和柔软的硅胶皮肤组成,其结构如图1所示。

图1 软手指的仿生结构
每根软手指内部设有两条孔道,一根SMA丝从手指根部穿入,绕过指尖再从手指根部穿出,作为驱动手指弯曲的肌丝。软手指的关节处仅由硅胶填充,构成柔性铰链,允许相邻指节相对转动。柔性铰链的形状为椭圆弧,因其更有利于关节的转动变形,具有良好的综合性能。在外部控制器输入电流的情况下,手指内部的SMA丝受热收缩,牵动手指变形。
2 软手指的驱动模型
2.1 SMA丝的驱动特性
在完全相变的温度下,SMA丝的收缩率约为4%,收缩应力约为200 MPa。本文所设计的软手指采用具有双程形状记忆效应的SMA丝,有利于弯曲后的手指在断电后自行恢复原状。以中指为例,所使用的SMA丝直径D=0.3 mm,从指尖到手掌固定端子的有效长度L约为130 mm。SMA丝在手指内部穿越了两次。驱动手指的张力T和最大行程ΔLmax分别为:
T=2p(πD2/4).
(1)
ΔLmax=εL.
(2)
其中:p为收缩应力;ε为收缩率。将相关参数代入式(1)和式(2),计算得到中指SMA丝驱动器输出的驱动力为28.2 N,最大行程为5.2 mm。
2.2 软手指的受力分析
本文所设计的柔性仿人手面向仿人服务型机器人,目标是实现与人握手等基本交互动作。为了保证仿人手在握手时有合适的握力,本节以中指为例,分析其握手时的状态。握手时中指的运动和受力情况如图2所示。

图2 握手时中指的运动和受力情况
图2中,虚线表示手指内部的SMA丝,交叉点表示关节的近似转动中心,Fi为各指节承受的压力,li为对应的力臂。据实际观察和测量,人们握手时几乎仅远指节和中指节发生转动,并在相应位置承受压力,转角、压力及其力臂的数值如表1所示。据观察,握手时近指节相关数据近似为零。

表1 握手时中指各指节的运动和受力参数
为了确定SMA丝所需要的驱动力臂大小,分别取远指节部分、远指节和中指节组成的部分为分离体,忽略SMA丝与手指本体的摩擦,对其作受力分析,如图3所示。
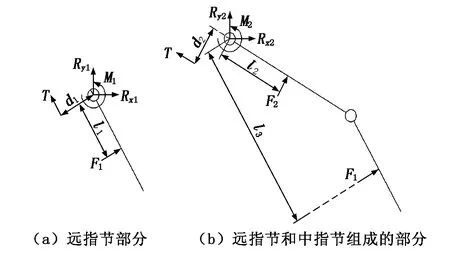
图3 所取分离体的受力分析
图3中,Mi为各柔性铰链的阻力矩,Rxi、Ryi为各关节处柔性铰链在x向和y向的支反力,T、di分别为SMA丝驱动手指各指节的张力及其力臂,Fi、li分别为各指节承受的压力及其力臂。分别列图3(a)、图3(b)的力矩平衡方程:
Td1-F1l1-M1=0.
(3)
Td2-F1l3-F2l2-M2=0.
(4)
由表1得到F1、F2、l1、l2,l3由几何关系确定为31.7 mm,关节的阻力矩也由表1中的转角计算:
Mi=Kθi.
(5)
其中:K为转动刚度,由材料和柔性铰链的尺寸决定,在本设计中取为0.5 Nmm/(°)。
由式(3)~式(5)解得d1、d2的值分别为1.24 mm、4.06 mm。近指节的驱动力臂d3对握手时的握力几乎无影响,但对于欠驱动手指结构,三个指节的驱动力臂之间的大小关系会影响它们的动作响应顺序。一般人手自然弯曲时,中指节响应最快,远指节、近指节依次次之。故d3应小于d2,略大于d1,本例取2 mm。故经适当圆整后中指各指节驱动力臂的数值如表2所示。

表2 中指各指节的驱动力臂
2.3 SMA丝收缩量与关节转角的关系
因SMA丝收缩率有限,因此有必要推导其收缩量ΔL与各指节转角θ之间的函数关系,以确定软手指的结构设计参数。
经过软手指的受力分析,得到了各指节所需的驱动力臂d,只要确定SMA丝在软手指基体内的布置位置,就可以根据关节转角θ的目标值计算所需的SMA丝收缩量ΔL。软手指关节发生转动后的状态如图4所示。
图4中,点O为转动中心,点A和点B为SMA丝经过的结点,线段AB到点O的距离为驱动力臂d,关节未发生转动时线段OA与线段OB的夹角为θn。当某个指节绕转动中心转过一个角度θ后,关节结点A、B间的SMA丝长度减小,结点和转动中心的距离x保持不变。对AOB构成的三角形应用余弦定理,分别计算转动前和转动后A、B结点间的距离,两者的差值即所需的SMA丝收缩量:
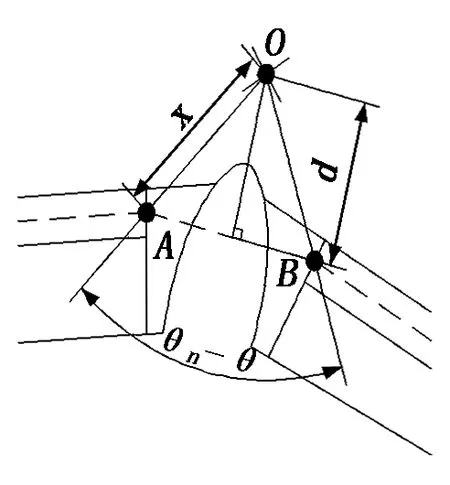
图4 软手指关节发生转动后的状态
(6)
由几何关系知θn与x满足关系:
x=d/cos[(θn-θ)/2].
(7)
因此,确定了结点夹角θn后,将表1和表2中的数据代入到式(7),即可确定结点距离x的取值。
2.4 软手指的最优结构参数
以关节转动时所需的最小SMA丝收缩量为优化目标,确定结点夹角θn的值。以中指节为例,利用MATLAB软件,由式(6)、式(7)得到结点夹角θn、关节转角θ和所需SMA丝收缩量ΔL关系的仿真结果,如图5所示。
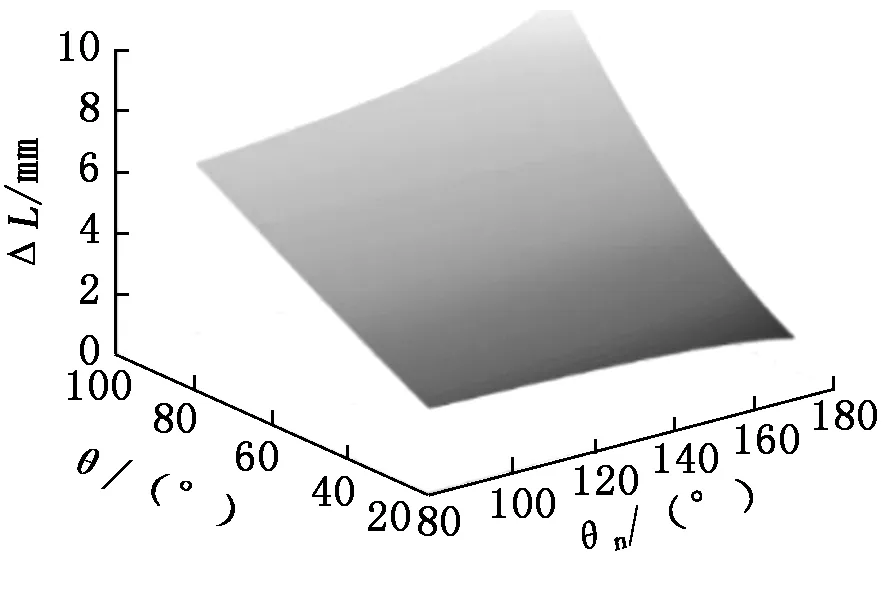
图5 结点夹角θn、关节转角θ与收缩量ΔL的关系
从图5可以看出:当指节转角θ在60°附近时,取不同的结点夹角θn对所需SMA丝的收缩量ΔL几乎没有影响;在此临界转角以下时,ΔL随θn的增大而减小;在此临界转角以上时,ΔL随θn的增大而增大。事实上,临界转角的大小与表1中的转角θ和表2中的驱动力臂d有关。
此外,在关节未发生转动时,将θ的零值代入式(7),可知SMA丝驱动器的驱动力初始力臂d0与结点距离x、结点夹角θn满足如下关系:
d0=xcos(θn/2).
(8)
对于结点夹角θn,由于手指在握手时各指节的转角θ均小于临界转角,应对θn取尽可能大的值,由式(8)可知这意味着对初始力臂d0取尽可能小的值。但若d0太小,会出现驱动时不稳定的状况,因此限制d0的最小值为1 mm。结合表1、表2的数据和式(7)、式(8)可确定远指节、中指节的结点夹角θn。对于近指节,因握手时其转角θ为0,故初始力臂d0即为表2中的驱动力臂d。对于结点夹角θn,因其对握手时所需的SMA丝收缩量ΔL无影响,故无严格要求,可根据工艺要求灵活调整,在本例中取130°。最终,确定的中指各指节结构参数如表3所示。

表3 中指各指节的最优结构参数
3 样机制备
软手指的骨骼通过3D打印直接成型,材料为聚乳酸(PLA)。柔性皮肤选用的材料为德国瓦克公司的M4601硅胶。通过3D打印制作硅胶铸造用的模具,并将手指骨骼安装于模具中,再布置两组型芯(材料为304不锈钢)用于成型手指内部的孔道,图6为模具装配截面图。将M4601双组份液流硅胶混合,从浇道孔注入模具,待其固化后可实现软手指的一体成型。

图6 软手指的模具装配截面图
将五根软手指安装到3D打印的手掌机壳上,内部安装了一块驱动电路板,见图7(a),由外部信号控制板内的MOS管放大电路,调节通过每根SMA丝的电流,从而实现对软手指的控制。最终的仿人手样机如图7(b)所示,其大小与人手尺寸相当,可以套进硅胶手套,提高仿人手的逼真度。

图7 驱动电路板与仿人手样机和硅胶手套
4 实验验证
4.1 单根手指的实验验证
为了验证驱动模型的准确性,以中指为例,开展其姿态控制实验。通过GPS-4303C直流稳压电源逐步增大SMA丝的通电电流,手指逐步弯曲,当电流达到1 A时,SMA丝完全收缩,手指达到最大弯曲变形,如图8所示。

图8 驱动电流分别为0 A、0.55 A、1 A时的手指状态
在未通电时,对手指的SMA丝进行了预拉伸,远、中、近指节的转角分别为20°、30°、10°,将表3的数据代入式(6)、式(8)计算得总收缩量ΔL1为2.1 mm;在手指完全弯曲后,远、中、近指节的转角分别为40°、60°、30°,计算得总收缩量ΔL2为6.4 mm。两者的差值为4.3 mm,即为SMA丝驱动器输出的行程。该值与2.1节计算的理论最大行程5.2 mm相近,说明所推导的驱动模型是合理的。分析误差来源,主要来自于制造误差、环境对SMA丝特性的影响、模型对柔性铰链转动中心的近似处理等。
4.2 仿人手样机的实验测试
通过STM32控制器向仿人手样机输入控制信号,可以实现对每根手指的单独控制。通过控制特定手指的弯曲,可以实现简单的手势展示,见图9(a)。图9(b)为柔性仿人手样机与人握手的效果,实验者可以得到与真人握手的相似感受,进一步验证了驱动模型的准确性。

图9 手势展示与握手测试
5 结语
介绍了一种由SMA丝驱动的新型柔性仿人手,其软手指具有硬骨骼和软皮肤的仿生结构,可直接一体成型,相比于其他柔性仿人手不仅整体结构简单、紧凑,而且具有良好的逼真度。提出了针对该软手指的SMA驱动模型,并对软手指的结构参数进行了优化设计。制作了仿人手样机,通过实验检测了手指的弯曲角度并测试了与人握手的效果,验证了驱动模型的准确性,并展示了该柔性仿人手应用于仿人服务型机器人的优势。
