无堤防河段河道管理范围划定技术分析
2021-07-29秦美茵孙秀峰张飞龙钟小阳
秦美茵,孙秀峰,张飞龙,钟小阳
(1.广东省水利水电科学研究院,广东 广州 510635;(2.中山大学 土木工程学院,广东 珠海 519000)
1 概述
广东省河流众多,以珠江流域及独流入海的韩江流域和粤东沿海、粤西沿海诸河为主,集水面积占全省面积的99.8%,其余属于长江流域的鄱阳湖和洞庭湖水系。全省流域面积在100 km2以上的各级干支流共614条。由于历史原因,许多地区河湖管理范围边界不清,侵占河湖、破坏河湖问题时有发生,严重影响河湖生态空间管控。依法划定河湖管理范围,明确管理边界线,是加强河湖管理的基础性工作,也是《水法》《防洪法》《河道管理条例》等法律法规作出的规定,更是中央全面推行河长制湖长制明确的任务要求。据测算,肇庆市德庆县50 km2以上河道总长为359 km,其中无堤河段总长为238 km,占比66%,在河道管理范围划定工作中,无堤河段易受地形、岸坡植被、建筑物等影响,是划界工作的重难点。
针对河道管理范围划定任务,国内学者开展了大量的研究工作。在技术应用方面,欧阳显良等[1]探索无人机航测技术在中小河流划界中的应用,认为该技术可获得测区立体像对、高分辨率三维点云数据和正射影像图,可较清晰地识别堤脚线等河道管理范围的起算线;夏祖伟等[2]结合正射影像光谱信息丰富、地面分辨率高的特点,提出一种融合激光雷达点云和正射影像的管理与保护范围线提取方法;殷丹[3]提出将ArcGIS应用于有堤河段和有规划设计资料无堤河段管理范围划界工作中;李青林等[4]提出应用奥维互动地图提高河湖和水利工程管理范围划界工作效率。但以上技术应用研究多集中于有堤河段管理范围划定,而山区中小河流大部分为无堤河段,针对无规划设计资料的无堤河段,曹均昌[5]以红柳河和新桥水库为例就划界过程中洪水分析计算进行探讨;赵巨伟[6]针对无堤河段划界,提出基于洪水分析计算的技术流程,并结合辽宁省丹东市草河划界案例,剖析了无堤段划界的实施过程和技术要点;罗姗姗等[7]以贵州省某河道划界案例,在开展测量工作的基础上分析了无堤河段划界技术流程;以上无堤防河段管理范围划定研究多着重于洪水分析部分,鲜有将上述技术结合应用,划界成果精度及生产效率有待提高,本文以德庆县悦城河为例,结合无人机航测、无人船断面测量技术,剖析无堤防河段管理范围划定的实施流程和技术方法,提出无堤河段设计水位与岸坡交线自动化快速生成技术方案,以供技术人员交流和参考。
2 流域概况
悦诚河属西江一级支流,发源于德庆禾叉顶,流经古有、莫村、永丰、播植、悦城等乡镇,于悦城镇注入西江。悦城河全长为82 km,集雨面积为877 km2,其中有43.4 km2由广宁县流入,9.97 km由高要市流入,总落差为798 m,平均坡降为1.62‰,多年平均流量为1.1 m3/s;流经德庆县河长为66.61 km,河口位于德庆县悦城镇。流域水系见图1所示。
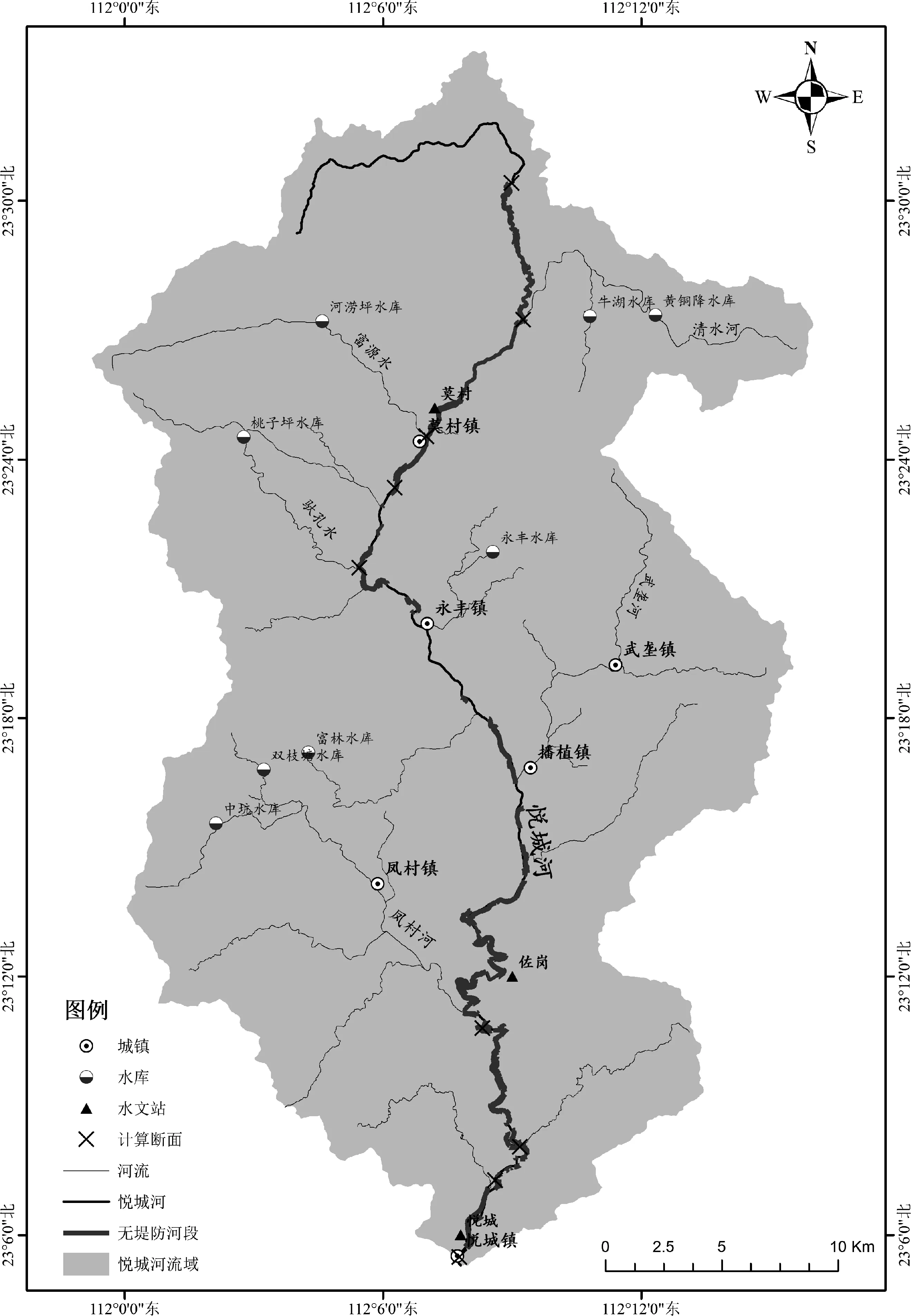
图1 悦城河流域水系示意
3 划界技术流程
3.1 资料收集与分析
对划界河道开展调研工作,收集河道相关规划设计资料、水利工程设计报告、河道所在流域水文站系列资料等,并对所采用的资料进行合理性分析。
3.2 无人机航测
对划界河段进行无人机航测,航测作业开展前,首先通过现场调研及资料收集情况确定航测范围;然后利用TY-3垂起型航测无人机搭载LIDAR航拍系统,根据预先确定的航摄范围,执行航测外业作业和像控布设;通过内业数据处理计算,获得划界河段三维点云数据、1:2 000数字高程模型、1:2 000正射影像数据等工作底图。
3.3 无人船河道断面测量
采用基于网络RTK技术的无人船测量系统进行水下地形测量,由千寻CORS、船载GNSS和便携式电脑组成导航定位系统进行定位导航,采用船载测深仪自动采集水深,后借助专业数据处理软件和绘图工具进行数据内业处理,获取1:500河道断面数据。
3.4 设计洪水分析计算
基于河道断面测量成果,采用水文比拟法、综合单位线法和新推理公式法3种方法计算设计洪水。现有设计资料可靠的河段,直接采用现有洪峰流量成果,或采用水文比拟法计算设计洪水;无可靠设计资料的河段采用综合单位线法和新推理公式法分别进行计算,并协调两种方法算得的洪峰流量值相差不超过20%,然后选用综合单位线法计算成果[8-9]。
3.5 确定管理区边界
利用已有设计水位成果或建立河道一维数学模型推算划界河段设计水位;利用Arcgis生成设计水位与岸坡交线并结合人工目视解译获得无堤河段管理范围基准线;然后根据划界标准,分河段缓冲分析得到管理区边界。
4 技术和方法
4.1 无人机航测
1)外业航拍
外业航拍需对摄区的地点及设施进行现场勘察和调研,选择摄区最有利的气象条件,并要尽可能的避免或减少地表植被和其他覆盖物对摄影和测图的不良影响,确保航摄像片能够真实地显现地面细部。在避开航摄范围内高压电力线和军民航空器的前提下,保证航摄飞行路线的直线性,并把项目区分成若干测段,每一测段再分为若干航带。在航摄飞行中尽量保持飞机姿态的平稳,转弯半径要大,飞机倾斜角不得大于15°,以防止GPS信号失锁。
2)像控测量
在完成一定区域范围的航摄,解算出影像数据后,即开始选取控制点、刺点的工作。采用千寻网连续运行参考站系统(CORS)作为测区控制系统参考,利用1个或若干个固定的、连续运行的GPS参考站,实时自动地提供经过检验的GPS观测值、各种改正数、状态信息。通过RTK获得测区的平面坐标信息,即国家2 000坐标系统。采用RTK获得大地高程数据,通过获得的RTK数据经过广东省地理信息中心的后期结算,获得测区准确的国家85高程系统下的像控点数据。
3)内业处理
对外业航拍及像控测量数据进行内业计算处理,获得划界河段三维点云数据、1:2 000数字高程模型(DEM)、1:2 000正射影像(DOM)数据等工作底图,悦城河某河段DEM及DOM成果示意分别见图2~3。
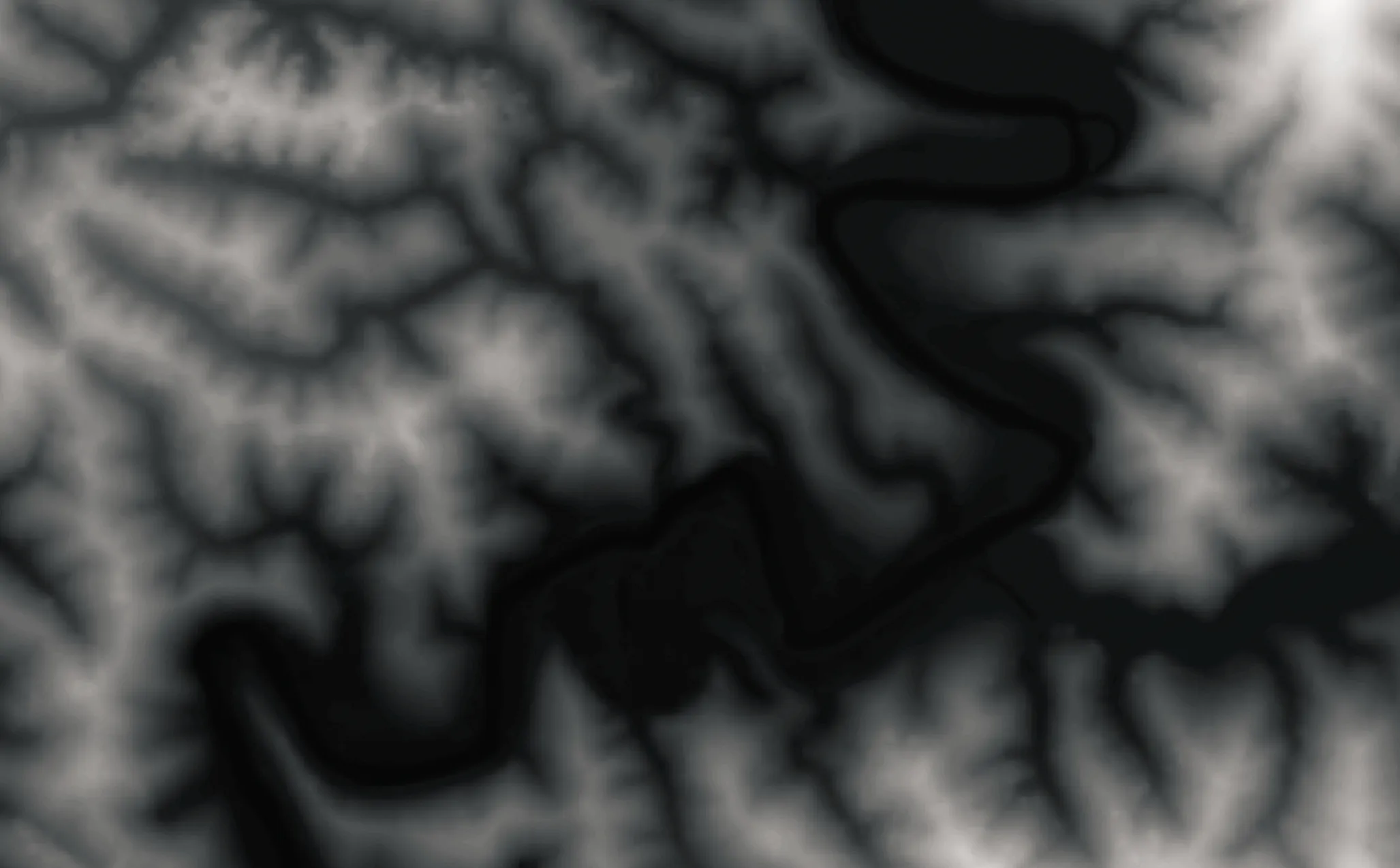
图2 悦城河某河段DEM成果示意

图3 悦城河某河段DOM成果示意
4.2 无人船河道断面测量
1)导航定位
启动测量软件,按软件提示设定记录间隔、船速档位、通讯ip、船只吃水等,由导航人员引导测量船至测区后开始作业,计算机实时采集定位、水深等数据,显示到图形界面。测量采用手动自动相结合的测量模式,测量数据的记录间隔按1 s/点,实现导航、定位、数据采集自动化。作业过程中测量人员实时观察RTK流动站的卫星信号锁定、固定解情况。
2)外业测量
水深外业测量采用船载测深仪自动采集,测量精度0.1%h。无人船的测量数据由无人船传输天线通过网桥传输到地面工作站中,无人船在工作中可以通过地面工作站和遥控器进行控制。测深过程中,测量人员通过电台实时查看测深数据,及时调整航速,使测深数据保持稳定、可靠[10]。
3)内业处理
数据内业处理分为数据预处理、数据改正和数据检查,主要是借助专业数据处理软件和绘图工具进行数据处理。其中数据预处理主要包括定位中心与测深中心的偏心改正、水深点采集时间延时检测、对定位数据进行数据异常值检测及修正以及水深数据异常值检测及修正;数据改正主要包括水深数据的吃水改正、声速改正和水位改正;数据检查主要包括制作图件,并采用等深线图示法及三维显示法对图件中存在的残留异常值进行修正,最后输出成果、制作成果图件,断面测量成果见图4。
图4 无人船河道断面测量成果示意
4.3 设计洪水分析计算
现有设计资料可靠的河段,直接采用现有洪峰流量成果,或采用水文比拟法计算设计洪水;无设计资料的河段,采用综合单位线法和推理公式法分别计算划界河段各频率设计洪水成果,并协调两种方法算得的洪峰流量值相差不超过20%,然后选用综合单位线法计算成果,悦城河设计洪水计算结果见表1。
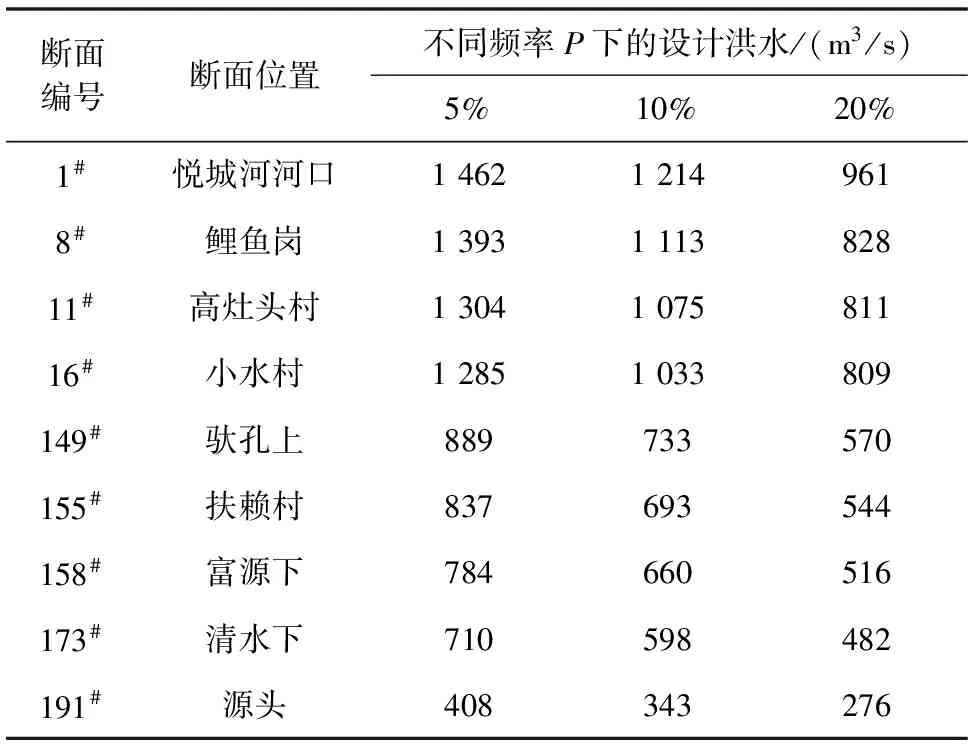
表1 悦城河设计洪水计算结果
4.4 设计水位计算
获得设计洪水计算结果后,建立河道一维数学模型推算悦城河设计水位[11-12],计算结果见表2。
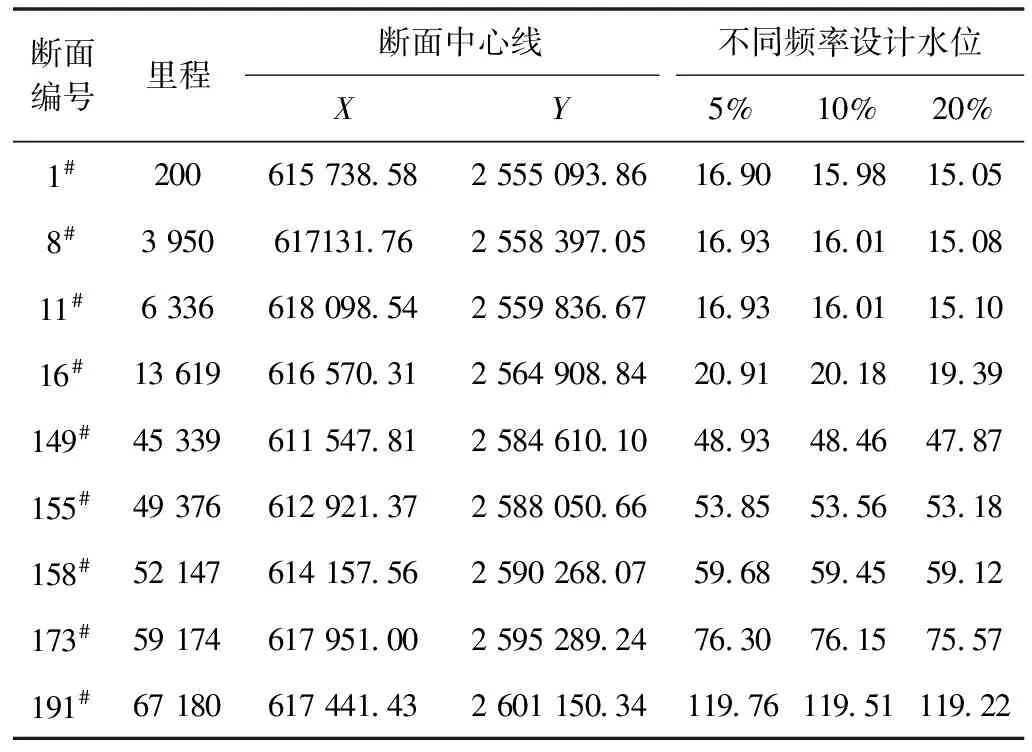
表2 悦城河设计水位计算结果
4.5 设计水位与岸坡交线自动化快速生成技术
利用Arcgis将设计水位计算结果与无人机航测获取的高分辨率DEM数据进行叠加分析,获取划界河段设计水位与岸坡交线。具体过程分析如下:
1)获取设计水位数据后,利用Arcgis对水位数据沿河道中心线进行二维插值,获得二维水位数据。
2)将二维插值后的水位数据生成不规则三角网(TIN)数据集文件,具体操作步骤为:打开ArcToolbox工具→3DAnalyst工具→数据管理→TIN→创建TIN。
3)将不规则三角网(TIN)数据集文件转换成栅格数据文件,具体操作步骤为:打开ArcToolbox工具→3DAnalyst工具→转换→由TIN转出→TIN转栅格。完成栅格数据转换,得到设计水位栅格图层,设计水位栅格数据示意见图5。
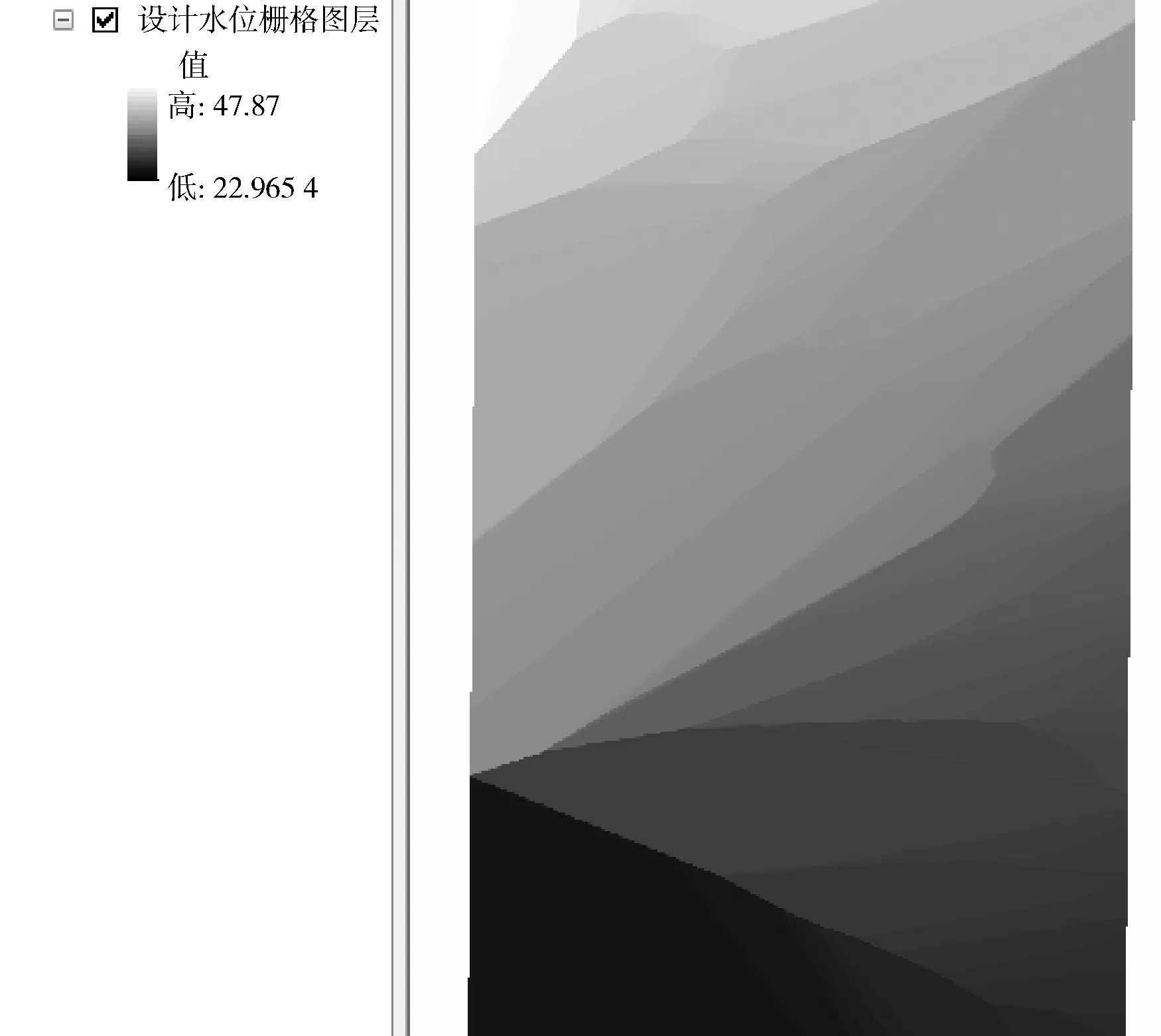
图5 设计水位栅格数据示意
4)应用设计水位栅格数据与相应河道高分辨DEM数据相减,获得水深数据,具体操作步骤为:打开ArcToolbox工具→3DAnalyst工具→栅格计算→减。完成设计水位栅格图层与相应河道高分辨DEM数据处理,得到水深数据文件,河道高分辨DEM数据示意见图6,水深数据示意见图7。
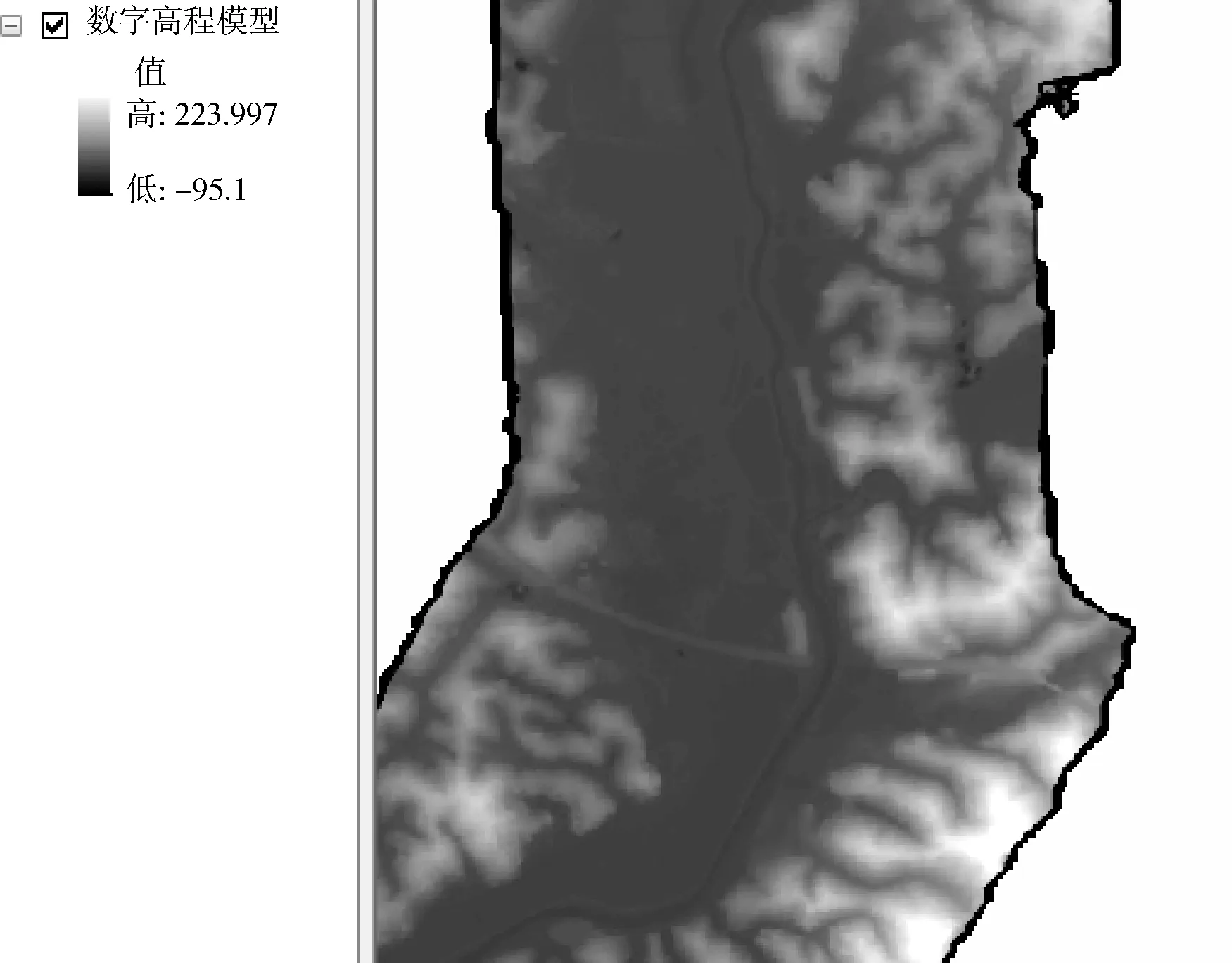
图6 河道高分辨DEM数据示意

图7 水深数据示意
5)对水深数据进行重分类,便可获得设计水位与岸坡交线,具体操作步骤为:将水深图层载入ArcMap→右键图层属性→符号系统→已分类→分类。对水深数据进行重分类,数值小于零表示地面高程高于设计水位的区域,数值大于零表示设计洪水淹没范围,设置区间-0.5~0作为缓冲区,此数值可根据数据分辨率设定。将无物理意义区间-247.38~-0.5设置为无颜色区域,缓冲区-0.5~0与设计洪水淹没范围区0~141.14分别设置不同颜色,便可获得设计水位与岸坡清晰交线,同时缓冲区的设置亦可直观表现地势的陡缓。水位岸坡交线成果图见图8。
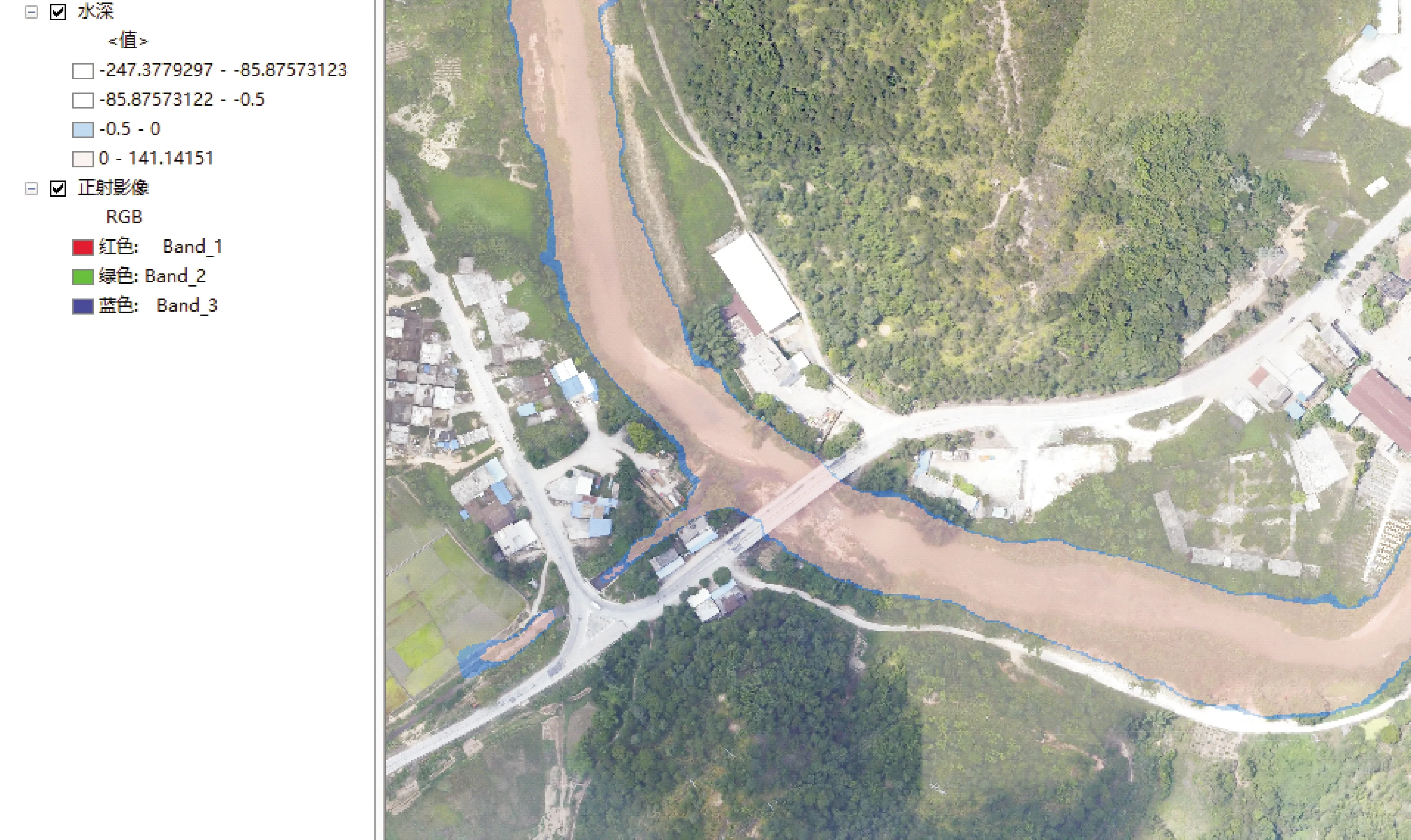
图8 水深数据重分类后获取水位岸坡交线成果示意
获得设计水位与岸坡交线图层后,基于高分辨率无人机航摄正射影像和现场调研情况结合人工目视解译绘制设计水位与岸坡交线获得无堤河段管理范围基准线;然后根据划界标准,分河段缓冲区分析得到管理区边界。根据《广东省河湖管理范围划定技术指引(试行)》,无堤河段划界分为无堤山区河段和无堤平原河段,无堤山区河段以设计水位与岸坡交线作为管理区边界,无堤平原河段以设计水位与岸坡交线为管理范围基准线,根据划界标准,结合护堤地宽度要求外延一定距离作为管理区边界。
5 结语
本文通过无人机航测获取划界河段三维点云数据、高分辨率数字高程模型、正射影像数据等工作底图,通过无人船河道断面测量获取1:500河道断面数据,采用水文比拟法、综合单位线法和新推理公式法3种方法分析计算设计洪水,然后建立河道一维数学模型推算划界河段设计水位;最后利用Arcgis将设计水位计算结果与无人机航测获取的高分辨率DEM数据进行叠加分析,实现设计水位与岸坡交线的自动化快速生成。
在运用无人机航测获取的地形数据确定设计洪水位的过程中,受岸坡植被、建筑物等影响,存在生成的设计水位与岸坡交线与实际地形误差,对于河岸建筑物较多的敏感河段应结合现场调研,RTK定点测量等方式进行修正,提高划界成果的精度。另外,应用设计水位确定河道管理范围较适用于山区河道或者地势较高的平原河道,对于地势较低的平原河道,计算的淹没范围普遍偏大,而中小河流一般河宽较窄,应用设计水位与岸坡交线作为河道管理区边界易导致管理范围偏大。
文章提出无堤河段设计水位与岸坡交线自动化生成的技术方案,读者后续通过Python语言或Arcgis自定义工具箱可简化操作步骤,进一步提高生产效率。