有源电力滤波器控制方法研究现状
2021-07-29亚志政
亚志政
(天津泰达电子工程有限公司 天津 300450)
0 引 言
随着现代化进程的加快,各种电力设备如整流器、变频调速设备以及各种电力电子设备相继投入到生产运行中。由于上述设备的非线性对供配电系统造成了相当严重的问题,如何治理谐波造成的污染和损失也成为各国研究的重点。
有源电力滤波器(APF)可同时实现谐波和无功功率的动态补偿,补偿效果好,所以各国把研究的重心放在APF上。其中APF的补偿电流跟踪控制能力决定了其整体性能。本文重点分析对比了各种主要的控制方法以及近些年发展迅速的智能控制方法。
1 有源电力滤波器的工作原理
如图1可知,谐波源是其中的非线性负载,它主要消耗无功功率并且发出一定频率的谐波。APF由几个部分构成,其最重要的核心部分分别是指令电流运算电路和补偿电流发生电路。
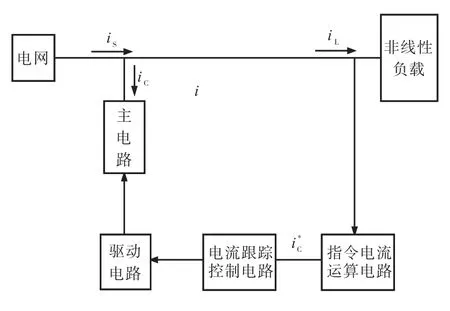
图1 有源电力滤波器原理图Fig.1 Schematic diagram of active power filter
指令电流运算电路的功能是检测出需要补偿的设备中电流的无功和谐波等电流分量。补偿电流发生电路的功能是按照指令电流运算电路给出的补偿电流指令信号产生实际的补偿电流,该电路主要包括3部分,分别是电流跟踪控制电路、驱动电路和主电路[1]。
2 补偿电流控制方法
2.1 滞环比较控制方法
由图2可知,该方法是把补偿电流的指令信号与实际的补偿电流信号进行比较,再将两者比较的差值输入到滞环比较器当中,通过滞环比较器产生控制主电路中开关器件通断的脉冲宽度调频(PWM)信号,该信号经驱动 电路来控制开关器件的通断,从而控制补偿电流的 变化。

图2 滞环比较控制方法Fig.2 Hysteresis comparison control method
上述控制方法的优点是响应速度快,整体结构简单,而且在输出的电压当中谐波成分相对少。它的缺点是滞环宽度很大程度上决定了开关频率、损耗以及控制的精度,如果滞环宽度比较小,那么控制的精度相应比较高,但这会造成开关频率和开关损耗增加。文献[2]将该控制方法应用到APF当中取得了一定的补偿效果。
2.2 滑模控制方法
该方法与其他控制方法的不同在于它的控制是不连续的,随着系统的运行,滑模控制方法根据检测出的系统状态随时做出调整,强迫系统运动在既定的状态轨迹当中,即滑模面上。因为这种状态轨迹是可以人为设计的,并且和系统对象的参数及扰动无关,所以该方法具有对参数变化及扰动不敏感、无需系统在线辨识等优点。电力电子装置拓扑结构的特点与上述控制方法的特点非常匹配,因而它在APF当中得到了非常广泛的应用。
滑模控制方法主要的缺点在于当系统的状态轨迹到达滑模面之后,它不会一直沿着滑模面向平衡点滑动,而是从滑模面的一侧运动到另一侧这样反复运动,即产生了抖振。文献[3-4]对APF通过其他途径来降低抖振取得了一定的效果,但是控制算法设计比较复杂。图3描述了上述过程。
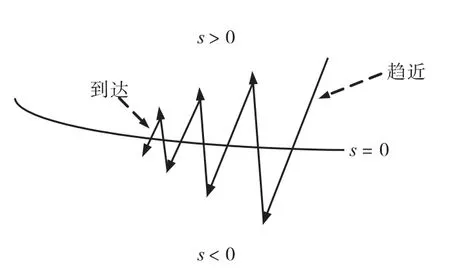
图3 滑模运动过程Fig.3 Sliding mode movement process
2.3 自适应控制方法
自适应控制主要分为2种,一种是模型参考自适应控制,另一种是自校正控制。模型参考自适应控制根据不同的控制需求使参考模型的输出满足一定条件,其中调节环节根据一定的要求调节控制器的参数,以此使参考模型的输出和控制对象的输出保持一致。自校正控制首先需要通过检测到输入和输出的值,然后将它们的值输入到参数估计器,该环节通过迭代的方法估计出对象参数,计算器根据已经编写的规则和得到的参数估计值计算控制器参数,最后通过上述方式控制被控对象从而达到控制目标。文献[5]将该控制方法应用到了APF当中。
2.4 模糊控制方法
利用模糊控制方法首先需要对模糊集合和模糊逻辑有一定的认识,因为该方法是以它们为基础的一种控制方法。其特点是利用隶属度函数来确定每个元素多大程度上属于某一个集合。模糊控制以模糊集理论为基础,以模糊语言变量和逻辑推理为工具,依照以往的实际经验和知识,通过一定的规则来达到控制目的。
模糊控制经常和PI控制结合使用,因为PI控制虽然结构简单,但是PI控制参数的选取依赖于系统的精确模型,对于一些复杂系统,模型往往不易建立,控制参数的选择成为难题,而且PI控制的鲁棒性比较差,容易引发超调。模糊控制就不受限于建模,而且鲁棒性能好,两者的结合可以弥补单纯PI控制的缺点,同时带来更高效的动态响应速度,更低的超调,更小的静态误差等。文献[6-7]利用模糊控制的特点来调整Kp和Ki这2个参数使得APF的直流侧电压有良好的稳定值。
2.5 人工神经网络控制方法
人工神经网络(artificial neural networks,ANN)是依照一定的规则通过数量很多的、比较简单的神经元相互组合在一起而形成的计算机系统,随着外部信息不断输入,该系统的状态做出一定的响应来处理信息,可以把ANN当成一个模仿人类大脑结构以及它的功能的信息处理系统。ANN有几个主要的特点:本质上是非线性系统,能充分逼近任意复杂的非线性关系;无需建立输入输出间明确的关系,而是通过学习过程和自适应算法实现,能够适应不确定系统的动态特性;系统信息存储在神经元及连接权中,具有很强的鲁棒性和容错能力;具有并行处理能力,可极大地加快系统的速度和可靠性。
由于APF本身是一个非线性系统,根据上面的描述可以看到,将ANN应用于APF控制是比较符合其特点的。基于神经网络控制的APF如图4所示,它的工作原理是依照一定的算法来完成神经网络的训练数据,通过输入给神经网络的电流误差信号来控制电路产生需要的PWM开关控制信号,从而产生需要补偿的谐波电流。
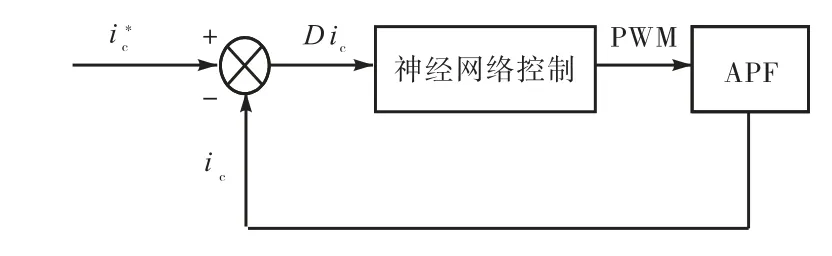
图4 基于神经网络控制的APF系统Fig.4 APF system based on neural network control
文献[8]将神经网络应用到APF的补偿电流控制当中,但是该方法比较复杂而且只是处于试验阶段。
3 有源滤波器发展方向
尽管近年来人们对APF的控制方法已经做出了非常多的研究和讨论,但是各种方法都存在着自己的一定缺点,所以人们还是需要对各种控制方法做出相关的改进,根据上面的描述,对APF的发展方向做出如下总结。
① 传统控制方法一般结构相对简单,控制过程也不复杂,响应速度比较快,但是这些控制方法一般情况下都不具备在线调整能力,针对一些不确定的系统往往效果不很理想,如果能和其他现代控制理论或智能控制方法相结合,将会取得一定的改进。
② 由于APF的电压、电流耦合在一起,APF本身是一个强非线性系统,APF的参数也会随着系统的运行发生改变所以具有一定的不确定性,而且APF针对的补偿对象即电网系统本身也是一个非常复杂的被控对象。基于上述原因,现代控制方法具有在线调节能力以及比传统控制方法更强的鲁棒性,故其控制精度更高,补偿效果也更加理想。
③ 现阶段,APF智能控制方法还未到达大规模有效使用阶段,但是相对于它的研究速度比较快。与ANN相比而言,模糊控制方法计算量比较少,同其他控制方法结合相对效果也比较好,故有一定的应用
前景。
4 结 论
本文在研究分析APF工作原理的基础上,分别从不同的层面对比分析了针对APF补偿电流的各种控制方法以及它们的优缺点,最后根据控制方法的特点给出了未来的研究方向。通过本文的阐述可以了解到当前对APF控制方法的研究还不够成熟,如何将已有的研究成果加以完善并在应用当中带来实际效益,值得进一步思考。■
