弯扭斜交网格结构参数化设计中的几何学理论与方法
2021-07-29吴哲昊张群力王天裕周科均
吴哲昊 张群力 王天裕 方 波 周科均
(1.浙江省建筑设计研究院,杭州 310006; 2.浙江新盛建设集团有限公司,杭州 310011; 3.杭州吉易科技有限公司,杭州 310051; 4.浙江中南建设集团钢构有限公司,杭州 310051)
1 自由形态空间网格结构与弯扭斜交网格结构
1.1 自由形态空间网格结构
自由形态空间网格结构是指结构整体几何形态不能用解析函数精确表达或拟合,但能以任何方式自由变换的空间网格结构,具有形式多样化和自由化的特点,但其网格划分存在一定的难度。近年来,随着计算机辅助技术的进步,建筑造型艺术的提高和人们审美水平的改变,自由形态空间网格结构越来越多地出现在大众的视野中,该类空间结构具有灵活的外形设计,体现出较好的视觉表现力,并能满足丰富的建筑使用需求,因而日益获得建筑师和结构师的青睐,逐渐被应用于标志性公共建筑中[1]。
1.2 弯扭斜交网格结构
弯扭斜交网格结构[2]属于自由形态空间网格结构中的一种,其构件截面大多采用矩形或多边形,截面形心约束在控制曲线上。弯扭构件的四个表面及四条棱边线在空间连续变化,将控制曲线的曲率、挠率变换充分地展现出来,从而能提供比圆形截面空间网格结构更丰富多彩的视觉效果,但在几何建模时与圆形截面构件相比,需增加矩形截面姿态信息。从2008年北京奥运会主场馆鸟巢开始,我国出现了一批弯扭斜交网格结构造型的建筑,其中最具代表的是北鸟巢南春茧和北京凤凰国际中心[3]。这些优秀的建筑设计不仅突破了传统建筑造型观念的束缚,还引领了我国建筑行业中数字化设计、数字化建造、数字化运营的潮流。通过这些工程的实践,大大提高了我国建筑行业BIM的实际运用水平。在2022年杭州亚运会乒乓球馆和游泳馆设计中都可以看到采用弯扭斜交网格结构造型的建筑形式。
弯扭斜交网格结构由弯扭构件斜交组成,弯扭构件可以由刚性截面运动扫掠成形,当构件截面控制轴线为空间曲线时称为弯扭构件,构件截面控制轴线为平面曲线时称为弯曲构件。本文介绍弯扭斜交网格结构几种不同的几何建模方法,这些方法在2022杭州亚运会乒乓球馆的弯扭斜交网格结构参数化设计并取得理想效果,高效、高质量的几何模型验证了方法的有效可靠性。本文中的图片除了图1和图2外,都来自乒乓球馆的参数化设计过程。

图1 自由形态空间网格结构

图2 自由形态空间网格结构

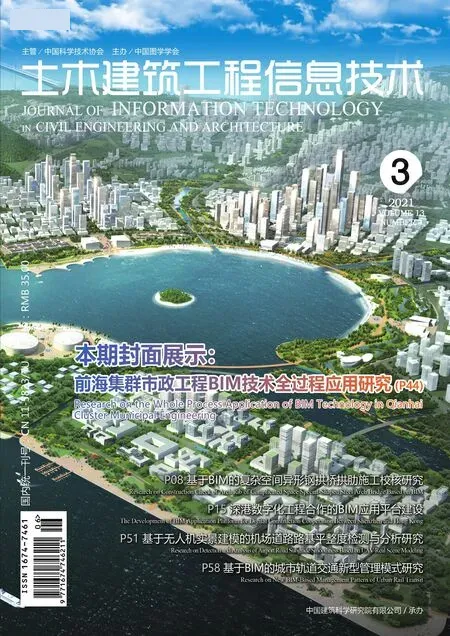
图3 2022杭州亚运会乒乓球馆弯扭斜交网格

图4 2022杭州亚运会乒乓球馆弯扭斜交网格
2 自由曲面上的网格及网格优化
2.1 曲面上优美网格剖分方法
曲面上有很多重要的参数曲线如曲率线、测地线、渐进线、斜驶线等等,用它们就可以构造许多重要的参数网格。实际应用中为了对弯扭斜交网格结构进行几何建模,首先要在控制曲面上先建立一个优美的斜交曲线网格作为弯扭斜交网格结构截面的定位轴线系统。
当前自由曲面上网格虽然已有各种各样的划分理论和方法,但尚未有成熟且适用性广的网格划分理论和方法,相应的一体化辅助设计软件,更多时候是根据具体工程情况,建筑师和结构师相互沟通、反复协调合作,手动生成网格加以优化,该方法设计效率较低。
Rhino软件、CATIA软件、自由曲面网格划分专用软件ZD-mesher等专用几何造型软件,都具有较好的曲面、曲线的几何操作功能,为相关设计人员提供所需的技术支撑。主要功能包括,在自由曲面上任意画线、曲线的调整、曲线的分段; 曲面的分区、曲面的展开; 采用Delaunay三角网格划分、映射法网格划分及调整技术、波前法、基本曲面展开的引导线波前法、映射—拟桁架等网格划分方法。
2.2 乒乓球馆弯扭斜交网格定位轴线优化
曲面上网格的最优控制指标是根据造型设计要求所确定,通常情况下,曲面上一个良好的造型网格应该满足以下几个基本控制条件。曲线的光顺性、网格大小、夹角的均匀性、良好的渐进性和对复杂曲面的适应性、可参数化调整(网格曲线为等参曲线、等值曲线)。编写相关子程序“按最优控制指标设定的奖罚函数进行迭代计算,条件判断直到满足精度,最后给出网格图形”。子程序中含有以下几个过程体:
(1)利用控制曲面的边界曲线上按设定的线段长度划分,确定曲面内部两个斜交方向曲线网格初步划分。
(2)根据初步划分,计算网格边长、夹角、面积等几何量。按控制指标和奖罚函数自动迭代调整网格的交点坐标。
(3)用分段测地线取代原始网格曲线,提高网格曲线的整体光顺要求,其中第(2)与第(3)可由程序自动判断交替执行。计算机执行程序后就能给出令人满意的曲面上网格效果。
图5中:顶上的网格用边长及夹角大小作为主要的优化控制指标迭代生成,中间的网格用曲线的光顺性作为主要的优化控制指标迭代生成,底下的网格用边长及夹角大小及曲线光顺性共同作为优化控制指标迭代生成。

图5 网格优化

图6 控制网格与控制曲面
3 曲面内蕴几何学
3.1 曲面上的黎曼度量
受高斯曲面内蕴几何启发,黎曼提出了n维流形的概念,这是更高层次的数形结合。曲面是二维流形,是内部可以进行几何讨论维数最低的空间。R3中的光滑曲面(二维流形)在刚体运动群下的完全不变量组是曲面的第一基本形式(内蕴)和第二基本形式(外在),这二个基本形式须满足Gauss-Codazzi条件。曲面的度量(内蕴)由曲面的第一基本形式表达,由R3中欧氏度量在曲面上诱导出来的一种黎曼度量,黎曼度量是张量场的一个重要特例,度量提供了切空间的内积,且可以测量流形上曲线的长度。度量在流形上定义了一个距离函数使之成为一个度量空间。利用曲面上的度量,就可以定义曲线的弧长、曲面的面积、两曲线的夹角、高斯曲率的等几何量,在曲面上进行几何计算。曲面和平面最大的区别是以曲代平,因此曲率是最重要的概念,而联络是研究曲率的最重要的工具[4]。意大利数学家列维齐维塔(Levi-Civita)对弯曲空间上的几何做出了突出贡献,1917年他发现了著名的平行移动,这是切向量保持内积的一个无穷小变换,也是联络的一个实例。关于列维—齐维塔平行移动的一个突出事实表明:正是平行移动,而不是黎曼度量,对涉及曲率的绝大多数性质做出了解释。
3.2 曲面上向量场的协变微分(或Levi-Civita联络)
欧氏几何中的平行性公理独立于其它公理具有特殊意义,其研究导致了非欧几何的诞生。曲面上Levi-Civita平行移动解释了Levi-Civita联络的几何意义。曲面上的测地线相当于平面上的直线,例如,直线的曲率为0,而测地线的测地曲率为0; 平面上两点间的最短距离是直线,曲面上(在小范围内)两点间最短的距离是测地线; 假如过这两点有测地线连接,平面上给定一个点及一个方向后能决定一条直线,曲面上给定一个点及一个方向后,也能决定一条测地线。但是直线还有一个性质,即直线上的切向量都是平行的,为了把这个性质推广到测地线上,必须先把平面上的平行的概念推广到曲面上。联络的概念与向量平移有关,因此要将平面上的向量平移的概念推广到曲面上来。
曲面上的向量是指曲面上切于该曲面的向量,如果把曲面P点处的向量a按三维欧氏空间中的平移,平移到曲面的Q点处,那么向量a在Q点处不一定是切于该曲面的,因此a在Q点处不一定是曲面上的向量。因此我们不能用R3中的平移方式来讨论曲面上的向量是否平行,必须改变原有的欧氏平移概念[5]。
将曲面S上曲线C上的向量场α(s)沿曲线的微分da(s),按曲面的法线n方向投影到曲面S的切平面上,就得到了协变微分Da(s)。协变微分是一种线性微分算子有时也称为联络,利用它可以建立曲面上的向量场不同点之间的保向量长度、保内积的一种同构关系。曲面S上的向量α(s)经过普通微分后得到的da(s),一般不再是曲面S上的向量,而经过协变微分后得到的向量Da(s),仍然为曲面上的向量。因此在曲面上可用协变微分代替普通微分。另外,由协变微分的公式可以看出协变微分的概念只涉及曲面的第一基本形式,与度量的微分有关,因此联络概念也是属于曲面的内蕴几何。根据黎曼几何的基本定理可知,曲面上给定一个黎曼度量g后,可以得到一个唯一确定的相容Dg=0且无挠联络D,这个联络称为曲面关于该黎曼度量的Levi-Civita联络。协变微分沿曲线为零时,称向量场沿曲线C在Levi-Civita意义下平行。
有了协变微分的概念,就可以把平行的概念推广到曲面上去,平面上一个向量场a是平行向量场的充要条件是da=0,也就是说a为常向量(长度、方向均不改变)。类似地,设a(s)是曲面S上曲线C的向量场。如果Da=0,那么称向量场a(s)是沿曲线C平行向量场,或者说向量场a(s)中的向量(沿曲线C)是互相平行的。也可以说向量场中的向量是由a(s0)经过(沿曲线C)平行移动得到的。称这种平移为Levi-Civita平移。
注记1:曲面上任意两个点A、B可用无数条曲线进行连接,每条曲线决定一种Levi-Civita平移(与路径有关)。如果起点A的向量不同,该Levi-Civita平移会产生不同的Levi-Civita平移向量场(与初始向量有关)。
注记2:对曲面S上任一点P,作S上过P的闭环路,若把P点的切平面中的向量,沿着这个闭环路作平行移动后再回到P点,两个向量不重合,相差一个旋转角(该角度与曲面的高斯曲率在曲线所包围区域内的积分有关)。由此得到切平面到其自身的一个旋转变换,如取遍所有闭环路时,它们所对应的切平面中的旋转变换全体就构成切平面上的旋转变换群的一个子群,称为P点的和乐群(holonomy group)。
3.3 曲面上的平行曲线及等距曲线问题
平面上的等距曲线关系就是平行曲线关系,但曲面上曲线的平行与等距概念涉及度量与联络的概念就变得较为复杂。
(1)曲面上的测地等距曲线
平面上等距曲线对应点之间的距离是欧氏直线距离,曲面上两点间的距离与连接这两点间的路径有关,它们的下确界就是连接这两点的短程线的长度。这个长度称为测地距离。所以曲面上(直纹曲面除外)只有测地距离意义下的等距线。这种等距关系称为曲面上的测地等距曲线。
(2)曲面上Levi-Civita意义下的平行曲线
平面上平行曲线对应点之间的切向量互相平行,但曲面上切向量只能作Levi-Civita意义下平行移动,所以曲面上只有Levi-Civita意义下平行曲线(两条曲线在对应点上的切向量在Levi-Civita意义下平行)。这种平行关系称为曲面上Levi-Civita意义下的平行曲线。
可用以下方法,利用测地线来判断曲面上的两条曲线在对应点上的切向量在Levi-Civita意义下是否平行。设A1∈L1,A2∈L2,两条曲线L1,L2对应点A1,A2上的切向量为r1,r2,判断r1与r2是Levi-Civita平行的方法很简单,
将r1,r2用测地线连接起来,再将r1从A1点沿着测地线作Levi-Civita平行移动(移动过程中r1与经过点上测地线的切向量始终保持夹角不变)到达A2点后若r1与r2重合。称r1与r2是Levi-Civita意义下平行的。当两条曲线上所有对应点上的切向量都有Levi-Civita意义下平行(两个切向量场是Levi-Civita平行的),这两条曲线就是Levi-Civita平行的。
(3)曲面上曲线的偏移(Offset)曲线
由于曲面上曲线的“等距”、“平行”性质对几何形体的观察、修改及参数化是直观而重用的,但是除了极少数曲面(如直纹曲面)上的曲线可以较方便构造等距线、平行曲线外。一般曲面上曲线的Levi-Civita意义下的平行曲线、测地等距曲线都很难构造。为解决此问题许多几何造型软件上推出了曲线的偏移(Offset)曲线。偏移曲线只是部分地满足了等距曲线或平行曲线的几何性质。在满足设计精度的前提下,可用曲面上曲线的偏移曲线近似代替曲面上曲线测地等距曲线以及Levi-Civita平行曲线。
4 弯扭斜交网格几何模型
4.1 直纹曲面S‖
用控制曲面上切丛约束在控制曲线L上的子切丛的一个特殊丛截面(L上的一个水平向量场)构造出直纹曲面S‖。曲面S上任一点上都有一张切平面,曲面及曲面上的所有切平面构成曲面的切丛。由曲面S的切丛在曲线L上的限制可以得到限制在曲线L上的子切丛TL(TL由L上每一点上的切平面构成)由L上每一个点上S的切平面中与L的切线垂直的切向量组成TL的一个丛截面~L上的一个水平向量场,由该向量场可得到一张直纹曲面S‖。(详见图7)
图6 控制网格与控制曲面

图7 S‖水平直纹曲面与它的法向等距面
4.2 直纹曲面S⊥
用控制曲面S上约束在控制曲线L上,S的法向量场组成的垂直(S的)向量场构造出直纹曲面S⊥。曲面S上任一点上都有一条法线,曲面上的所有法线构成曲面上的法向量场,由曲面S的法向量场在曲线L上的限制可以得到L上的子法向量场~垂直向量场,由该向量场可得到一张直纹曲面S⊥。(详见图8)

图8 S⊥垂直直纹曲面和它的等距面
4.3 用参数曲面求交、等厚壳镂空等构造弯扭斜交网格几何模型—-方法1
(1)模型分析(用方法1可生成M和N二种模型; N模型详见图9,M模型详见图10)

图9 S⊥+S‖的法向等距面生成的模型(方法1生成的N模型)

图10 壳与镂空壳(方法1,M模型)
由控制曲面S+S⊥的法向等距面生成等厚壳镂空模型M和由直纹曲面S‖+S⊥的法向等距面生成等厚壳镂空模型N之间的比较。显然S‖与S沿着L相切,S⊥与S沿着L相垂直,所以这两张直纹曲面沿着曲线L保持垂直关系。用S⊥的等距曲面和S的等距曲面可以得到关于S的等厚壳镂空后的模型M。用S⊥的等距曲面和S‖的等距曲面我们就可以得到关于S‖的等厚壳镂空后的模型N。模型M和N的侧面相同均为S⊥的等距面,M的前后两个面为S的等距面,N的前后两个面为的S‖等距面。M与N在前后两个表面上沿中曲线相切,共用同一法向量(保持一阶几何接触关系)。
再讨论一下两种模型的不同加工工艺,S+S⊥生成的等厚壳镂空后的模型M可用于减料加工(在具有初始形状的原材料上经过切、削、磨等工艺制作成形)的制造工艺加工制作,由于它的前后两个曲面是S的等距曲面,与S一样是自由曲面,其高斯曲率一般不等于0,是不可展曲面。对于S‖+S⊥生成的模型N来说,由于S⊥和S‖都是可展的直纹曲面(高斯曲率等于0),直纹曲面经法向等距映射后仍然是直纹曲面。所以弯扭斜交网格模型N的四个表面都是可展的直纹曲面,因此可以用平面板材通过弯扭的方法加工制作弯扭板件来拟合模型。
注记:如果控制曲面上的控制曲线是测地线或分段测地线,那么按我们的构造方法得到的曲面S‖实际上是测地线L上的一个Levi-Civita平行向量场Lr2。因为根据测地线性质定理可知,测地线上每一个点上的单位切向量构成了测地线上的一个Levi-Civita平行向量场Lr1。(r1为L的切向量,r2为切平面上与r1垂直的向量)事实上在构造S‖时,要求在测地线L任一点上,向量场Lr1和向量场Lr2的向量的夹角保持不变(始终垂直),向量长度保持不变,内积不变。
4.4 曲面S⊥和曲面S‖的参数方程
设曲面S的参数方程是r(u,v),为双参数方程,参数u, v是独立参数,当两个参数都是另一个参数t的函数时互相之间就不再独立了。这时双参数的曲面方程也成为了一个单参数的曲线方程r(u,v)=r(u(t),v(t))=r(t)。

图11 需要镂空的棱形边界线
(1)构造S⊥参数方程
设S曲面r(u,v)上的单位法向量场为r′u×r′v=n(u,v),它约束在曲线L上的法向量场为n(u(t),v(t))=n(t)。
法向直纹曲面S⊥方程为:r(s,t)=r(t)+sn(t)
其中,s、t为参数,


其中,k为常数表示S⊥的法向映射距离。当k激活成为参数后,就得到三维流形r(s,t,k)=r(s,t)+kn(s,t)(关于S⊥的等厚体)。
(2)构造S‖参数方程
设S曲面上曲线L的方程为r(t),S曲面在P点的单位法向量为n(t),曲线上任一点P上的单位切向量为r′(t)。
在P点曲面S切平面上的且与R′(t)垂直的单位切向量为r′(t)×n(t)=m(t)
切向直纹曲面S‖方程为:R(s,t)=r(t)+sm(t)其中,s、t为参数,
S‖的法向量为R′s×R′t=m(s,t)

4.5 基于曲线曲面上的活动标架建立弯扭斜交网格结构模型——方法2(用方法2生成的模型详见图12、图14、图16)

图12 室内效果(方法2生成的模型)

图13 离散的——活动标架场与截面场

图14 活动标架+LOFT模型(方法2生成的模型)

图16 外部效果(曲翘点为4#点,方法2生成的模型)
活动标架外微分法是微分几何中的重要工具。在这里介绍利用曲线、曲面上的活动标架场,对斜交弯扭网格进行建模。R3中的光滑曲线在刚体运动群下的完全不变量组是它的弧长、曲率和挠率。设s是曲线的弧长参数,α(s),β(s),γ(s)是曲线的切矢、主法矢、付法矢。曲线上的Frenet标架场{r(s);α(s),β(s),γ(s)}是十分重要的,它的导数公式就是Frenet公式,其中的系数恰好就是曲率和挠率,曲线论基本定理的证明需要利用Frenet公式。
(1)活动标架结合sweep 曲面的几何建模
Sweep(扫掠)操作在刻划复杂形体的曲面和实体的几何造型系统中具有很强的造型功能。作为Sweep运动的物体,可以是一个点,也可以是曲线或曲面甚至是实体。在基于Sweep的几何造型中,一个基本的问题是运动路径上活动标架的确定,尤其是对于运动路径是空间曲线的情形,它直接影响到生成Sweep曲面的形状控制,在其它应用中,也直接影响运动物体的形状和姿态的调整。一条空间曲线上有无数种活动标架场,常用的有Frenet标架、RMF标架(最小旋转标架)及GTF(广义平移标架)等,它们所生成的Sweep曲面的形状效果是不同的。问题是如何在路径曲线上放置局部标架,利用局部标架对运动物体作定位或姿态的调整。
Sweep曲面通常可以用以下构造式来表示:
S(t,s)=γ(s)+C1(t,s)N+C2(t,s)B
其中,γ(s)是路径,C=(C1(t,s),C2(t,s))为平面截线(空间截线所生成的曲面形状类似; 因此可转化为平面情形),它可以沿路径形变或扭转,N、B是沿着路径运动的活动标架的两个单位矢量。我们未采用上面三种常用标架,而是利用控制曲面、曲线上的线性结构建立一个专用活动标架。弯扭斜交网格结构的每根杆件可以由一个矩形边框(或矩形环),将其中心约束在控制曲线上运动产生,在控制曲线的每一点上,该矩形框的姿态可由该点上一个专用活动标架所确定。用sweep操作可以得到高精度的弯扭构件模型。
(2)活动标架结合loft(放样曲面)的几何建模
采用控制曲线及该曲线上的活动标架场还可以用loft(放样)曲面的方法建立变截面的弯扭斜交网格的构件模型。
实际上在计算机上建模时往往是利用活动标架建立离散的截面场(详见图13),再用loft(放样)的方法得到loft曲面来近似代替Sweep(扫掠)曲面。
(3)建立控制曲面、曲线上的专用活动标架场
设P为曲线L上一个点,L为曲面S上的一条曲线:P∈L⊂S,利用P点曲线L的单位切向量作为P的活动标架的第一基矢r1,曲面S的单位法向量作为P点的活动标架的第二基矢r2,r1×r2=r3作为P的活动标架的第三基矢。即得P点的活动标架(P;r1,r2,r3)。利用该标架中的平面直角坐标系(P;r2,r3),由活动标架的构造过程可知该坐标系位于曲线的法平面中,就可以将弯扭构件的正截面布置在R3空间中,其中矩形的两个主轴分别与r2,r3重合。
具体步骤如下:
1)建立控制曲面上的斜交曲线网格;
2)对每条网格线按弧长等分;
3)在每个分点上建立活动标架;
4)在每个标架平面上用欧氏几何布置杆件的截面;
5)用放样的方法得到loft曲面。当截面足够密时,所得到的loft曲面就会逼近Sweep曲面。
5 弯扭构件上的玻璃幕墙龙骨及玻璃裁剪与排布方法
5.1 幕墙龙骨
弯扭斜交网格区域的玻璃幕墙龙骨可以利用弯扭构件的活动标架来建立三维模型(图15)。因为它的控制曲面与钢结构的控制曲面是(法向)等距曲面关系,其控制曲线与钢结构的控制网线也是(法向)等距线关系。
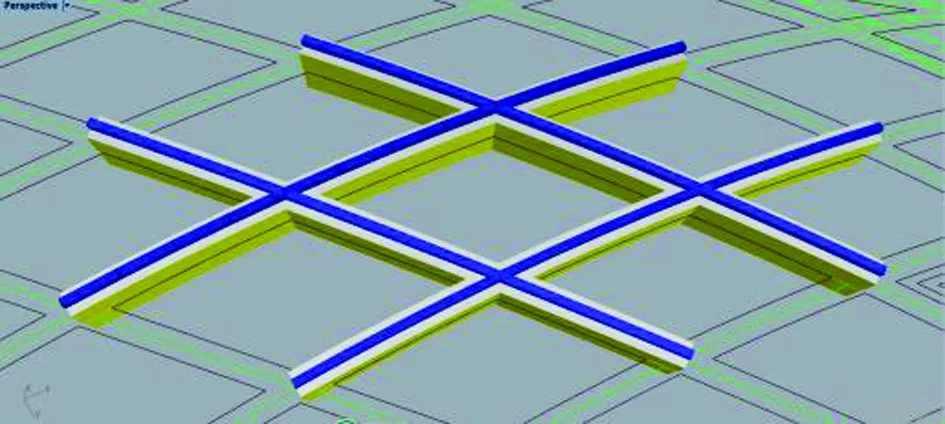
图15 弯扭斜交网格带龙骨

5.2 玻璃的裁剪与排布
前面已对曲面上曲线的测地等距线、曲线的Levi-Civita平行曲线进行了讨论,在三维建模时,在满足设计精度的前提下可以利用(offset)偏移曲线来代替“平行”或“等距”曲线。
将等距曲面上的所有控制网格线向两侧棱形区域偏移75得到偏移曲线,然后用这些偏移曲线两两求交,删除棱形区域以外的部分曲线和曲面,得到一块块独立的棱形曲面。每一个曲面棱形上有4个角点,用其中的1#、2#、3#点作一个平面(该平面并不是某一个点的切平面),4#点一般情况下位于平面的下方,但也有极少数位于平面上方。用4#点上控制曲面的法线与平面相交得到4′#点,这样我们就可以利用1#、2#、3#、4′#点建立一个棱形的平面,其各条边均为直线。其中的4′#点曲翘脱离控制曲面,其它三个点都位于在曲面上。对于前面提到的极少数情况“4#点位于平面的上方”就要将此棱形平面玻璃沿平面的法线方向,向外平移保证4#点位于平面的下方。
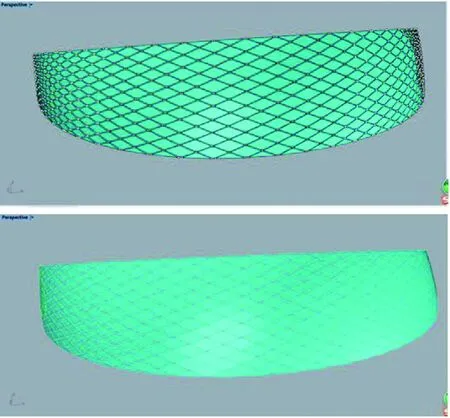
图17 棱形玻璃幕墙
6 弯扭斜交网格结构从虚拟到现实
CAD→CAE→CAPP→CAM
当前数字信息技术在人工智能、大数据、云计算、5G通讯等技术支持下突飞猛进,不同学科、不同产业的理论知识、技术方法相互融合已成为一种趋势。利用目前涵盖机械产业场景的计算机辅助4C系统,对弯扭斜交网格结构从虚拟到现实的过程进行小结。
6.1 CAD
CAD(Computer Aided Design)计算机辅助设计,研究了参数化设计中的几何方法后,可根据建筑的基本几何控制系统,对弯扭斜交网格进行CAD。本工程采用RhinoScript[7]或RhinoGrasshopper[8]几何造型软件进行参数化建模得到NURBS[7]曲面、NURBS实体模型。
6.2 CAD→CAE
CAE(Computer Aided Engineering)计算计辅助工程,CAE与CAD衔接,基于数模进行计算,可得到仿真结果(一种近似的数值分析方法)。利用Rhino模型中弯扭斜交网格的定位轴线(线模型),将Rhino数据文件转换为CAD格式,导入钢结构设计软件3D3S、MST等软件,设定相关几何、物理参数后,按单层网壳进行力学分析。也可结合AutoCAD平台、Revit平台提取Rhino模型中弯扭斜交网格的结构构件的分析计算数据,然后通过自主编制的自动化数据处理和传递程序将数据传递给有限元软件SAP2000进行整体受力分析,及有限元软件ANSYS进行整体稳定分析。
目前CAE中的一个热门课题是等几何分析方法[9],等几何分析(IGA-Isogeometric Analysis)方法基于有限元分析方法的等参单元思想,将计算机辅助几何设计(CAGD)中用于表达几何模型的NURBS基函数作为有限元分析方法中的形函数,实现了CDA和CAE的无缝结合。IGA也是有限元分析的一个很有前途和潜力的发展方向。
6.3 CAD→CAE→CAPP
CAPP(Computer Aided Process Planning)计算机辅助工艺设计,指借助于计算机软硬件技术和支撑环境,利用计算机进行数值计算、逻辑判断和推理等的功能来制定零件机械加工工艺过程。借助于CAPP系统,可以解决手工工艺设计效率低、质量不稳定、一致性差、不易达到优化等问题。
将几何模型中的数据格式与数控设备的数据格式进行统一匹配后导入数控设备,对弯扭构件中扭转程度较小的构件可以采用“数控+激光加热-拉弯工艺”在矩形钢管上直接加工。类似的加工方法还有顶推技术。对弯扭构件中扭转程度大的构件,则需要用弯扭板件焊接组成。方法:数控裁剪、数控多点成形机成形、全自动三维测量、搭建三维胎架、全自动焊接成形。
6.4 CAD→CAE→CAPP→CAM
计算机辅助制造CAM(Computer Aided manufacturing)在机械制造业中利用计算机通过各种数值控制机床和设备,自动完成离散产品的加工、装配、检测和包装等制造过程。
CAD模型与CAM模型用相同的数据格式进行对接[10]。将Rhino数据文件转换为CAD格式,导入钢结构出图软件takela设定相关参数后,就能得到钢结构施工详图。或提取图纸表达数据,然后通过自主编制的自动化数据处理和传递程序,传递给施工图出图软件 MIDAS-Building进行出图。或将Rhino数据文件的格式转换成数控加工软件所要求的文件格式后进入CAM阶段,Rhinoceros具有众多数据文件通用性较强。但当前CAD环境普遍存在数据交换问题,可使用CAD转换软件Transmagic,从而能降低成本、消除隐患以及实现与多种应用程序间的CAD进行数据交换。TransMagic公司是一家领先的三维CAD转换软件开发商,其所开发的产品为制造业解决了互操作性所面临的难题。TransMagic提供独特的多格式转换软件产品,使模型能够在三维CAD/CAE/CAM系统之间快速转换。支持三维CAD模型文件类型和生成文件有,CATIAV4,CATIAV5,Unigraphics,Pro/ENGINEER,AutodeskINventor,AutoCAD(via*.sat),Solidworks,ACIS,Parasolid,JT,STL,STEP,IGES。
7 结语
结合工程实例介绍了弯扭斜交网格结构参数化设计中的几何学理论和方法,曲面上的内蕴几何学相对于弯曲形体的参数化设计来讲是一种底层理论与技术。弯扭斜交网格结构几何形体确实有些复杂,但用流形几何语言来描述就很简单:由控制曲面和控制曲线生成一个垂直向量场S⊥和一个水平向量场S‖,由这两个向量场构造成的直纹曲面是弯扭构件的中曲面,将它们做法向等距映射就可得到弯扭构件的四个表面,通过曲面求交、裁剪就可以得到弯扭斜交网格结构的模型。用活动标架加刚体运动扫掠成形也可以得到弯扭斜交网格结构的模型。两种方法得到的模型从几何本质上讲是相同的,在控制点加密后有很高的拟合度。方法1生成的模型几何意义明确,模型生成便捷适用于方案和初步设计阶段,方法2生成的模型精度随着控制点加密而不断提高,模型上直接生成弯扭构件的截面信息便于后期生产加工,适合于施工图设计阶段。弯扭斜交网格结构可采用RhinoScript或RhinoGrasshopper等几何造型软件进行参数化建模,得到NURBS曲面、NURBS实体模型。新型有限元方法“等几何分析-IGA”在CAD模型与CAE模型之间搭建了一座桥梁,在高质量NURBS模型支持下,可以实现两者间的无缝对接。