基于无人机实景建模的机场道路路基平整度检测与分析研究
2021-07-29刘颖张勇卢吉,周诚
刘 颖 张 勇 卢 吉, 周 诚
(1.华中科技大学 土木与水利工程学院,武汉 430074; 2.武汉市市政建设集团有限公司,武汉 430056)
引言
路基平整度是指在道路施工过程中,路基面纵向的凹凸量的偏差值,是控制路面平整度的一种重要手段,也是保证施工稳定性和安全性的重要措施。路基平整度关系到道路路基层施工的准确性以及路基层压实性能,对道路整体验收质量有重要影响[1]。此外,机场路基平整性关系到飞机起飞降落的安全、平稳舒适以及路面所能承受冲击力的大小和使用寿命,因此,为确保飞机起飞降落安全,机场道路需要对路面平整度进行控制,确保平整度符合施工技术标准和要求[2]。
近年来,三维激光扫描技术应用于平整度检测引起了相关学者的关注,赵玉臣等利用激光点云数据检测墙面平整度[3]; 李伟等利用地面三维激光扫描技术进行道路平整度的研究[4]; 高仁强等利用机载激光雷达对新疆某一道路建立三维地形表面模型,进行平整度可视化表达[5]。目前,路面平整度的检测方法仍然是利用3m直尺或者车载激光平整度检测仪,三米直尺检测的原理是每200m测试两处,每处连续10尺,利用三米直尺进行最大间隙的检测和计算[6]; 车载激光平整度检测是利用激光位移传感器检测四分之一车轮沿某一车道的路面高程变化[7],目前的检测方法仅仅利用选取的个别点或者个别车道线的平整度反映整条道路的平整性,使得平整度检测存在片面性。
综上所述,目前缺乏一种针对道路全场、全过程的平整度检测的方法,因此本文提出了利用无人机扫描道路,通过实景建模得到道路的三维实景模型,在此基础上可得到道路的三维高程曲面图并进行任意车道和路线的国际平整度指数(IRI)计算,从而进行路基平整度检测。为证明该方法的可行性,依托武汉某机场项目的滑行道进行路基平整度检测实验。
1 机场路基平整度检测方案
1.1 工程概况
为了验证无人机实景建模进行平整度检测方法的可行性,选取武汉某机场飞行区扩建项目滑行道作为实验场地,利用车载激光平整度检测仪和无人机实景建模两种检测方法,进行平整度的检测。该机场位于武汉市汉南区,位于长江左岸的一级阶地,场地地形较为平坦,地面标高为22.88~23.86m,总施工面积达到200万m2,该项目按照结构形式分为停机坪、垂直联络道、滑行道以及跑道等(图1)。

图1 某机场滑行道施工现场实景图

图2 车载激光平整度实验布置方案
1.2 实验段检测方法
本机场扩建项目主要分为跑道和滑行道,其中滑行道宽度为18m,两侧道肩分别宽3.5m,总宽25m,本实验选取宽为18m,长度为350m,总实验面积为6 300m2的滑行道路基进行平整度检测。
本次实验选取的滑行道处于第一层水稳,已经完成水稳摊铺和压实并且无养护布遮盖,路基面没有因降尘洒水而导致路面潮湿,保证了激光检测以及无人机扫描的清晰性。首先利用车载激光平整度检测仪进行检测,其次再进行无人机扫描实景建模,并保证两种实验方法下的实验条件相同。
(1)车载激光平整度检测方法
车载激光平整度检测仪进行路基面平整度检测的原理是利用激光位移传感器测量路面高程,获得路面与其沿线物的三维信息,最终得到国际平整度指标,单位为m/km。车载激光平整度检测的具体方法如下:在16m*350m的实验场地上,根据13路激光检测设备和检测车辆型号以及实验段的路基宽度,在竖直方向上平均划分为0~4m、4~8m、8~12m、12~16m的4条车道,并在检测车上安装激光检测仪; 检测车按照30~60km/h的设计时速,从实验起点行驶至实验终点,并以10m为采样间隔进行4条实验车道平整度的检测。
(2)无人机实景建模平整度检测方法


图3 无人机检测平整度流程图
2 实验结果
2.1 车载激光平整度检测结果
车载激光平整度检测实验中,共4条车道,每条车道分为左右两条车辙,得到平整度检测数据。由于车辆在行驶过程中会出现偏离预定车道或者间断测量等情况,使得获取的激光点云数据不能完全真实地反映被扫描路基面的表面信息,对于一些干扰噪声点需要对获取的激光点云进行滤波处理,剔除极端点之后的车载激光平整度检测仪得到的国际平整度检测值能够较为真实的反应被测车道的路基面平整度。根据以上所述,经过数据预处理得到的车载激光平整度检测结果示意图如图4所示。

图4 车载激光平整度检测结果
根据车载激光平整度检测仪的检测数据可知,2车道在130~150m和220~250m的平整度有较大起伏变化,除此之外,实验路段的国际平整度指数均在0.5~2.0之间,波动起伏不大,实验路段路基面整体较为平整。根据车载激光平整度检测仪得到的检测数据,并依据《公路路基路面现场测试规程》(JTG 3450—2019)和《公路工程质量检验评定标准》(JTG F80/1—2017)进行数据处理,进行路基面平整度检测指标分析,具体见表1。

表1 车载激光平整度指标分析
分析结果表明每车道的国际平整度指数的平均值在1.000~1.400范围内,标准差在0.300~0.500之内,IRI合格段数均为35,IRI合格率为95%~99%,因此路基面平整度良好,满足了机场路基面的平整度质量检验的要求。
2.2 无人机实景建模平整度检测实验结果
根据无人机扫描得到的照片,划分空中三角形,并按照精度要求确定60%~90%的采样率并进行实景建模,得到实验路基面的三维实景模型,具体见图5。

图5 三维实景模型
在三维实景模型中,首先根据标记点确定车载实验对应车道的车辙线,在车辙线上选取样本点,设置样本点的间隔为5cm,获取各样本点的高程信息,形成高程散点图,相对大多无人机摄影而言,本次实验的无人机航行高度仅为10m,对于样本点的高程精度可以达到0.0001m即0.1mm。以1车道右侧车辙的高程数据为例,形成高程散点图,如图6。

图6 1车道右侧高程散点图

图7 无人机实景建模检测结果
以10m为采样间隔进行无人机实景建模检测,得到以上的平整度检测结果。根据图7无人机实景建模进行平整度检测的结果的可知,4条车道整体平整度较好,除1车道右侧在0~30m的路段平整度变化较大之外,其他车道在0~150m路段的平整度较好,在150~350m的IRI检测值起伏较大,路基面存在凹凸不平。根据无人机检测结果,依据《公路路基路面现场测试规程》(JTG 3450—2019)和《公路工程质量检验评定标准》(JTG F80/1—2017)进行数据处理,进行路基面平整度检测指标分析,具体见表2。
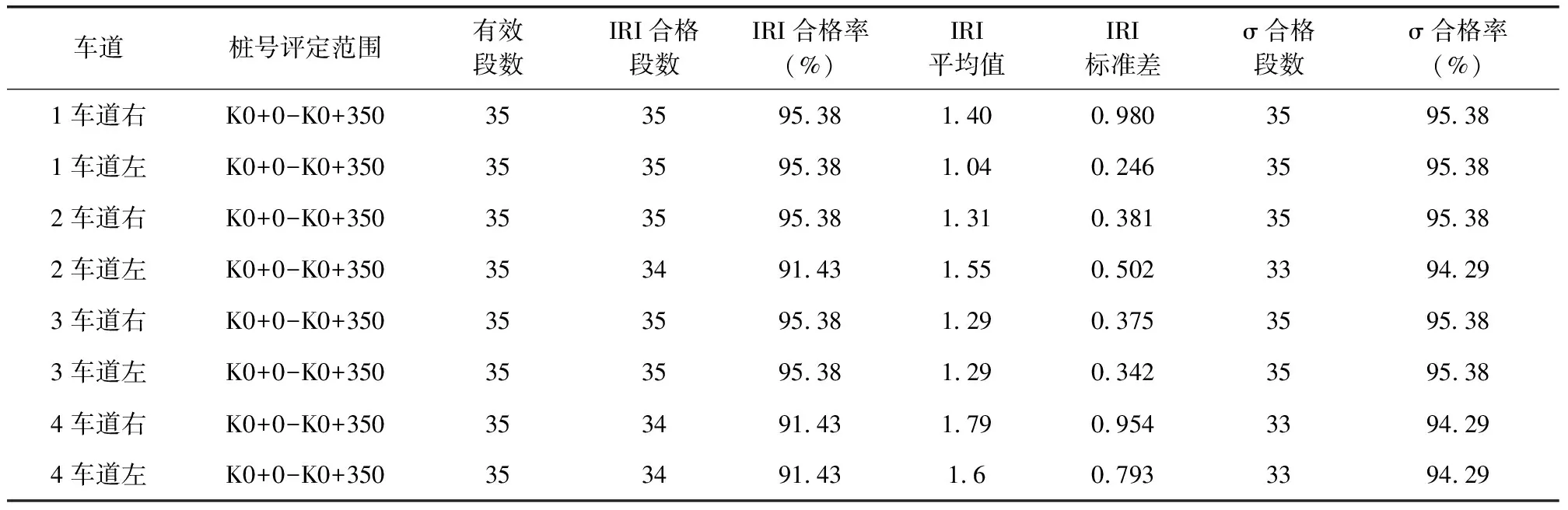
表2 无人机检测平整度结果分析
3 车载激光平整度检测与无人机实景建模检测结果比对
3.1 结果比对
车载激光检测和无人机实景建模两种实验得到的平整度检测结果如图8所示,根据图8观察可知,在0~30m的1车道右侧以及150~300m的4车道左右两侧检测结果存在较大的差别。观察三维实景模型中对应车道的部分,究其原因1车道右侧部分地面存在水渍,路面较为潮湿,无人机扫描时可能存在水面反光、照片不清晰等误差; 4车道为施工车辆行驶车道,在无人机扫描过程中有施工车辆来回运输,使得照片存在阴影以及重叠率降低并对建模精度可能有一定影响; 以上所述可能为误差存在的主要原因。因此首先手动排查照片存在的问题,除去部分不清晰以及误差较大的照片,在误差允许的范围内进行补拍,利用无人机实景建模的检测结果与车载激光检测的方法实验结果是相似的,可以通过无人机实景建模的方法反映路面的


图8 车载激光检测与无人机实景建模检测结果示意图
平整度,并且该方法在一定程度上可以替代车载激光平整度检测的方法。
3.2 无人机全路段的平整度检测
相比于车载激光平整度检测的方法,利用无人机建模的一大优势是可以得到道路全场区的任意样本点高程数据,并形成三维空间的全路段相对高程曲面图,达到道路全场景平整度检测的目的,不再限制于检测车只能检测车辙所在直线的平整度,如图9所示。

图9 全路段相对高程曲面图
全路段相对高程曲面图是在准确获取任意点实际高程的基础上,找到检测路段的最小高程,能够准确形象地反映出被检测道路的起伏变化,该机场滑行道的相对高程在0.05m范围内,并且本实例的测量精确度可以达到毫米级。根据无人机实景建模的结果得到全路段高程曲面图,并根据检测路段的要求设置样本点间隔,进而根据国际平整度指数的计算公式得到任意纵截面的IRI检测值,实现全路段任意截面的平整度检测。
4 结论
本文以武汉市汉南机场滑行道路基面为例,对平整度检测进行了相关研究,通过车载激光平整度检测仪与无人机实景建模两种平整度检测方法的检测结果对比分析结果如下:
(1)证明了利用无人机实景建模并进行IRI指标计算,是可以进行道路平整度检测的,并且该方法的检测结果对于现有检测结果而言具有一定的可参考性;
(2)此外,根据地面分辨率反算航拍高度并利用无人机实景建模的方法能够获取全路面的高程信息,在本实例中精确度可达到0.1mm,在保障精度的同时实现全路段的平整度检验,克服了现阶段平整度检测片面性和偶然性的缺点。