基于地铁列车LCU之间CAN通信应用和分析
2021-07-28郑吴富黄凯宇姜送来陈秀珍
郑吴富 江 腾 黄凯宇 姜送来 陈秀珍
(南宁轨道交通集团有限责任公司运营分公司 广西 南宁 530001)
0 引言
随着地铁车辆控制技术的发展,最近几年地铁无触点逻辑控制单元(LCU)替代传统继电器进行列车控制的方案在地铁行业内越来越受到认可。地铁车辆一般采用4编组或者6编组,每编组车采用多台LCU替代继电器,每节车LCU通过MVB把各自状态数据上传到TCMS网络[1]。南宁地铁3号线车辆为6编组,采用的LCU技术方案为:各车LCU之间采用冗余CAN通信,仅在头车LCU与TCMS之间通过MVB通信。该方案减少LCU占用整车TCMS控制网络的端口资源,加强整车LCU控制单元之间整体性,能够最大化利用LCU优势特点,简化车辆布线,丰富车辆功能。
1 技术方案分析
1.1 系统方案
南宁地铁3号线车辆采用6台LCU,所有车采用3U-B机箱配置;各车厢LCU之间通过CAN网络进行数据共享;列车级CAN网络采用冗余设计,由CAN1/CAN2两路物理及接口上完全独立的总线组成,实现当任意总线异常或接口松脱时,可保证LCU系统数据正常交互的功能;Tc车LCU承担MVB通信功能,将整车LCU工作状态上报至TCMS网络。整车LCU网络拓扑图如图1所示。
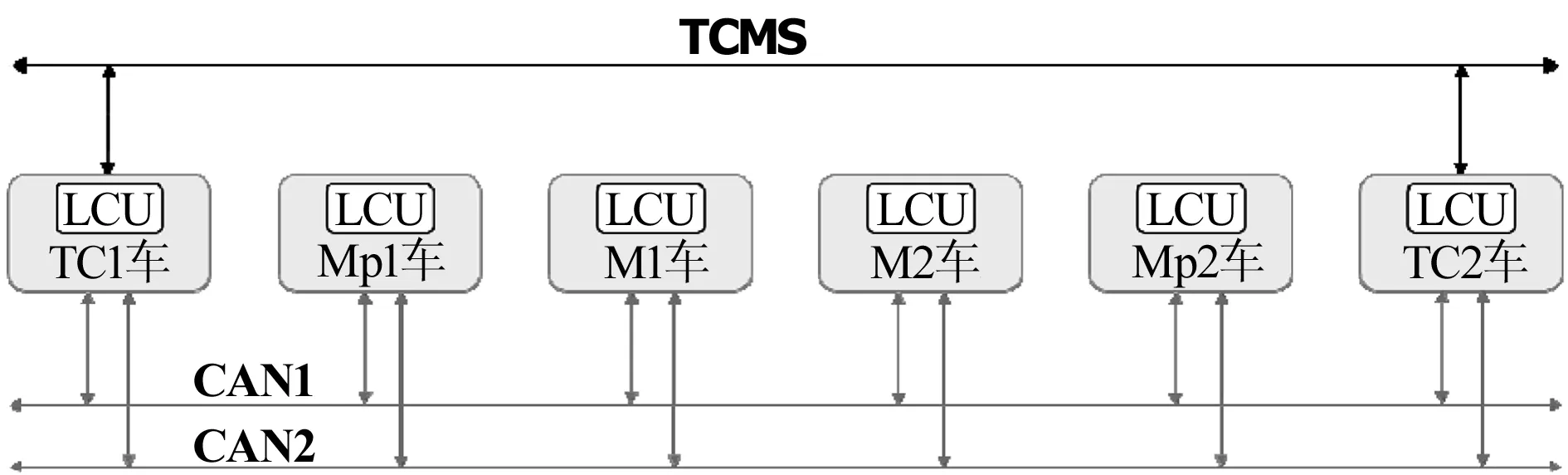
图1 南宁地铁3号线车辆整车LCU网络拓扑
1.2 CAN数据处理
CAN数据传输分两层进行,处理层级如图2所示。第一层数据传输的优先级最高,主要为列车线数据。第二层数据传输的优先级较低,主要为故障数据和状态数据,数据传输周期为300 ms。
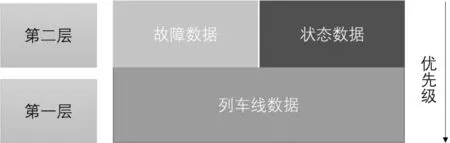
图2 CAN通信数据处理层级
1.3 CAN替代列车线可行性分析
在ISO 11898协议规范中,波特率与传输距离之间关系如表1所示。

表1 CAN通信波特率与传输距离
六节车编组车辆长度约180 m,LCU安装在电气柜内部,CAN通信线缆实际长度长于列车长度,粗约220 mm,因此选用250 Kbps以下波特率。再综合传输及时和距离的降额设计,采用125 Kbps波特率,具体分析如下:
(1)125 Kbps的速率, 传输一位数据的时间是:0.000 008 s(1/125 Kbps)。
(2)一帧CAN通信扩展帧,共16字节,一帧时间:0.001 024 s(8×16×1/125 Kbps)。
(3)一帧中有8字节代表数据,共有8×8=64位数据,如果列车线硬线信号采用LCU的CAN网络信号替代,一帧可以满足64条列车线信号。目前LCU的CAN网络信号替代的全车列车线信号有升降弓、受电弓监视、HSCB状态监视、列车占有、列车门控制及状态采集、零速、允许库用、牵引制动控制、停放(空气)制动控制及施加(缓解)等16条,CAN通信单帧可以满足全部列车线信号要求。
(4)一列车6台LCU全部传输完程列车线数据,则需要6×0.001 024 s=0.006 144 s。
(5)考虑容错性,一列车6台LCU 2次全部传输完程列车线数据总共需要时间:2×0.006 144 s=0.012 288 s,即12.2 ms。满足输入输出响应时间。
(6)LCU的IO输入输出信号响应时间设计为30 ms。
1.4 CAN替代列车线可靠性分析
(1)独立性
CAN1/CAN2网络硬件物理层是完全独立的。LCU内部两路CAN通信电路设计采用2个接口、2个独立CAN收发器、2个独立处理器以及2个独立供电电源(如图3所示),保证整车设备CAN通信在任意单点故障的情况下,不会造成冗余CAN网络故障或网络瘫痪[2]。
(2)冗余性
CAN1/CAN2通信收发数据完全一致,没有主备用之分,LCU设备通过内部对两路CAN通信数据进行优选处理。保持良好冗余特性。
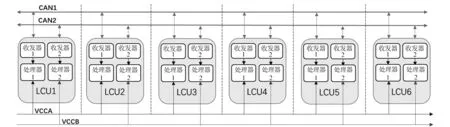
图3 LCU CAN独立性
(3)容错性
CAN 总线通信采用特别的策略对数据帧进行处理, 包括位填充、数据块编码、循环冗余检验等,用以提高数据传输的准确性。采用非破坏性仲裁机制筛选当前发送节点,提高总线使用效率的同时确保可靠性[3]。利用故障界定和总线管理的方式,处理已经出现的故障节点。
2 CAN通信应用优点
(1)简化列车信号硬线
如图4所示,传统硬线列车线一个信号需要两根①②硬线完成。整车总共16根列车线信号,那么需要32个硬线信号。
而CAN网络信号则只需要两个通信线,所有列车线信号通过CAN网络即可传输完成,实现列车线信号网络化,简化硬线布线,如图5所示。
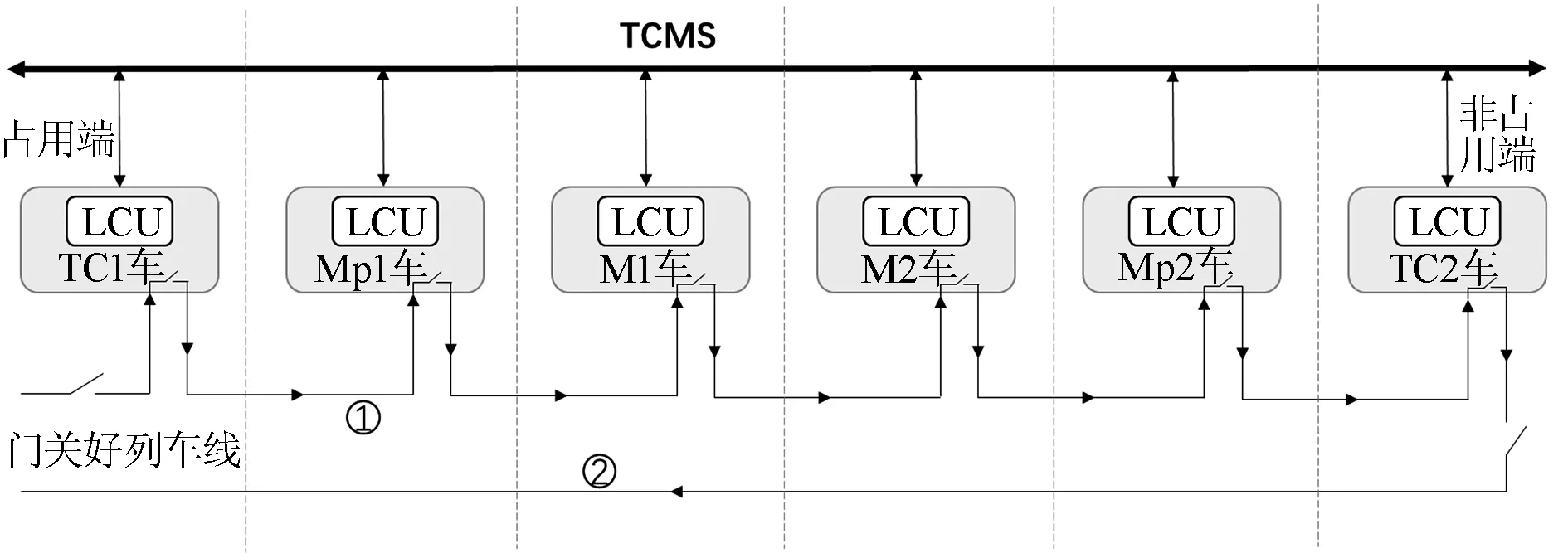
图4 硬线列车线网络拓扑
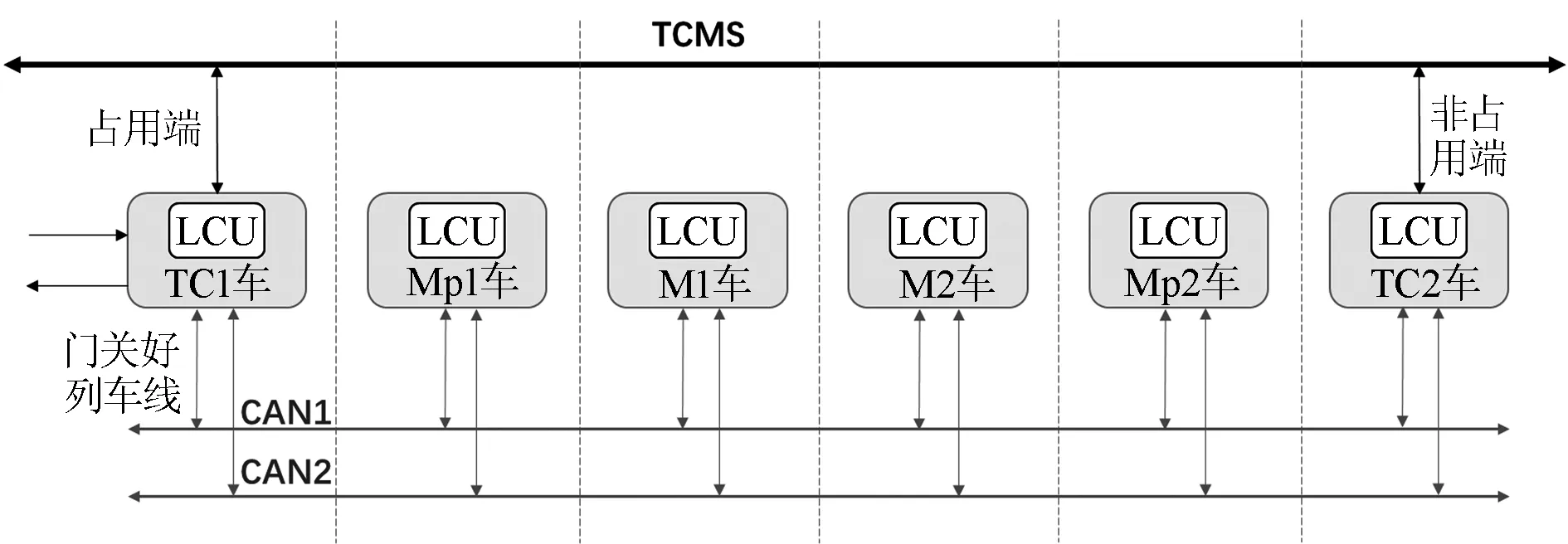
图5 CAN列车线网络拓扑
(2)优化TCMS网络端口资源
从图4和图5网络拓扑可知道,传统网络拓扑方式,LCU占用MVB端口6个资源,而LCU之间采用CAN通信后,整车LCU占用MVB端口2个资源,只有原来的1/3。
(3)列车控制功能扩展性
后续车辆新增列车控制功能,按图4硬线列车线网络拓扑方案,则需要新增两条列车硬线,如果原先车辆预留列车硬线不足,则需要新增车端连接器等,增加改造难度和工作量。如果采用LCU CAN通信网络替代硬线网络,则不需要增加列车硬线,仅通过修改LCU逻辑软件就可以实现列车硬线功能,大大简化改造工作量。
3 现场应用问题分析
3.1 问题简述
南宁3号线车辆初期现场调试以及试运行过程中,TCMS多次报出类似“TC2车LCU6 CAN2通信故障”和“TC2车LCU6 设备生命信号丢失”,此类闪报1 s故障,随后故障消失。但LCU设备CAN通信控制功能又正常,不影响列车控制功能。
3.2 数据分析
根据日志记录数据,发现TC1车、TC2车在故障发生时刻以及之后,均一直在正常进行CAN通信。故判定此次通信故障并非TC2 车LCU CAN2硬件故障,只可能是信号数据受到干扰而导致信号丢失。
3.3 机理分析
(1)TCMS诊断LCU设备生命信号丢失机理
如图6所示,LCU1和LCU6车同时通过MVB通信上传LCU1/LCU2/LCU3/LCU4/LCU5/LCU6设备生命信号。当TC1或者TC2车VCU收到LCU上报丢失状态,则报出故障信息。
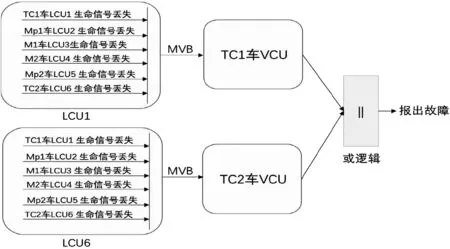
图6 TCMS诊断机理逻辑
(2)LCU设备状态传输过程
如图7所示,LCU1和LCU6同时接收来自各节车LCU的状态信息,其中就包括CAN通信故障信息和设备生命信号。
(3)LCU设备生命信号上报处理
LCU1和LCU6判断其他设备生命信号时间为3 s。通过检查软件参数设置,可知CAN通信故障时间为1 s。
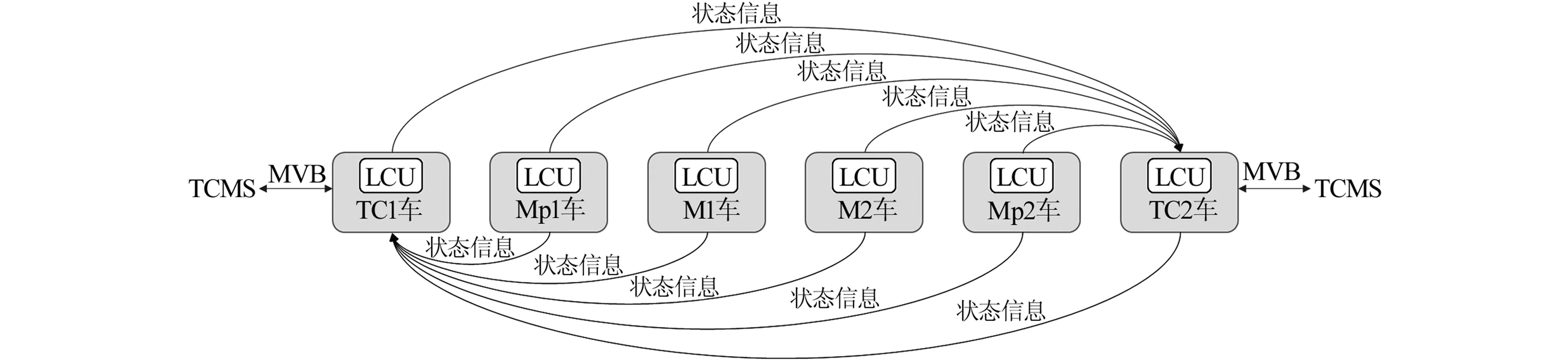
图7 状态数据传输图
(4)数据分析过程
①LCU应用层MVB任务周期是99 ms,逻辑运算任务周期10 ms:T1=100 ms;
②LCU的故障数据以及状态数据CAN通信周期延时是300 ms:T2=300 ms;
③TC1 LCU MVB数据通过主控板到MVB的时间是200 ms:T3=200 ms;
④TCMS接受MVB板数据时间:X=256 ms。
单次传输需要最大延时时间:T1+T2+T3+X=856 ms;二次传输需要最大延时时间:2×(T1+T2+T3+X)=1 712 ms;三次传输需要最大延时时间:3×(T1+T2+T3+X)=2 568 ms。
在现场复杂应用环境下,LCU间CAN通信受到不同程度的电磁干扰。那么CAN通信发生周期中断、丢包、错包以及延时等现象就存在可能;如果通信故障判断机制过于灵敏,不设计足够的滤波时间,就存在应用过程中偶尔上报通信故障和生命信号丢失现象,大大降低系统可靠性。
4 优化以及应用试验
4.1 优化设计
(1)TCMS诊断机制
如图8所示,将TC1 VCU和TC2 VCU逻辑由
“或”改成“与”[4],发挥冗余特性,避免误报故障,提高可用性。
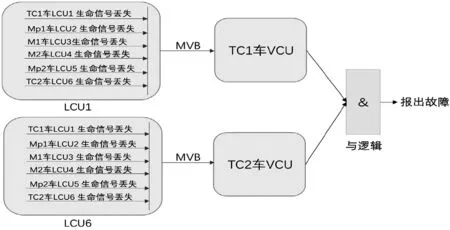
图8 TCMS诊断机理逻辑
(2)LCU处理机制
将LCU1和LCU6判断其他设备生命信号时间从3 s延长设置为8 s,另外CAN通信故障时间设置为3 s,提高抗干扰性能和容错性能,避免误报故障。
4.2 优化后试验结果
针对上述故障,在理论分析计算和逻辑梳理分析、修改优化设计后,经过一年多的现场实际运行跟踪,列车运行状态稳定,LCU运行状态良好,再未出现过类似的问题。验证了该设计优化的可行性和有效性。
5 结束语
本文对LCU采用双CAN冗余网络通信替代列车线信号进行了理论分析,从实际应用效果看,技术革新确实带来了实际应用优势。但同时在应用初期,LCU出现CAN通信误报故障问题,经过深入分析、解决以及验证确认过程,为后续车辆控制技术提升和新技术引进提供了参考经验。
