基于Qt的雷达显控数据处理一体化设计
2021-07-28房亮刘涛庆
房亮 刘涛庆
(中国电子科技集团公司第二十七研究所,河南郑州 450047)
0 引言
随着陆基侦察雷达的快速发展,对于显控软件的要求也越来越高。由于军用技术对于保密的要求,由美国微软公司开发的Windows操作系统平台越来越不适用于复杂的战场环境,所以对于显控软件的国产化提出了更高的要求。国内具有自主知识产权的操作系统平台一般都是基于开源的Linux系统,Qt具有跨平台性能和良好的图形界面设计优势,所以基于Q t开发的雷达显控软件能够在国产平台上运行。
Qt作为业界优秀的跨平台开发工具,目前支持的平台包括Windows、Mac、Linux等桌面操作系统和其他的嵌入式平台、移动开发平台。它针对各个平台编写平台相关的适配层,为不同的平台提供一套相同接口的库,直接与各个平台融合在一起,既不损失性能又跨平台。对开发者来讲,能够做到每次针对不同的平台编译成该平台的本地代码,一次开发而能快速的平台移植。多篇文献对基于QT的雷达终端软件设计进行论述,文献[1]提出了一种基于Qt的图形视图框架下的实时刷新显示被动雷达信息的方法,文献[2]提出了一种基于Qt的雷达信息显示的新方法,文献[3]提出了一种基于Qt,在ARM平台下的雷达终端显控软件设计的方法。
本文的雷达终端软件基于Qt开发,将显示控制和数据处理一体化设计。显示控制功能完成目标信息的显示和雷达分机的控制,进行人机交互。数据处理功能完成对雷达信号处理数据的分析处理,产生目标数据。将显控和数据处理功能集成到软件中,操作更加简便,有利于雷达终端的小型化和可移植。
1 软件架构设计
1.1 模块划分
本雷达终端软件基于显示控制和数据处理一体化设计,显示控制功能主要包括图形显示和分机控制子模块,数据处理功能主要包括数据采集、数据处理和数据输出子模块;雷达主界面以P型、B型、电子地图显示画面(可切换)为背景,实时显示目标的点迹、航迹坐标、雷达分机工作状态等;分机控制模块接收操作员的指令,发送工作参数到雷达主机,从而控制信号处理、功放、天线等分机,并监视雷达分机的工作状态。数据采集模块通过网口接收信号处理后的数据,根据通信协议解析数据;点迹处理模块进行解模糊、点击凝聚、帧间合并等处理,产生距离、方位、速度等点迹信息;航迹处理模块进行初试建航、航迹相关、航迹管理等处理,形成目标航迹。其模块划分如图1所示。
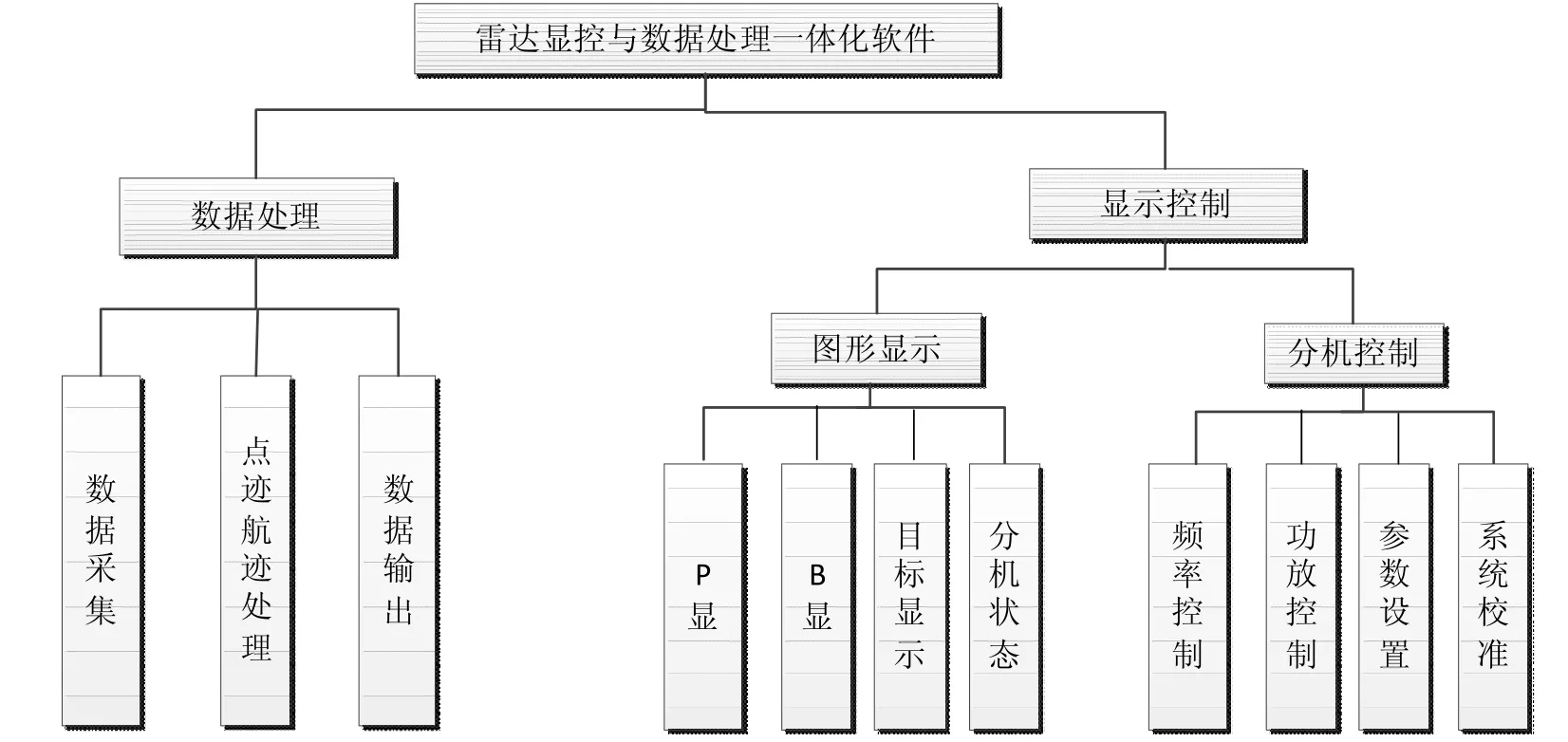
图1 软件模块划分Fig.1 Software module division
1.2 工作流程
软件启动后,首先监测网络连接状态、分机的工作状态,如果连接不成功则显示通信链路故障,如果分机故障则显示故障信息;其次加载系统参数和配置文件,进入雷达主界面。雷达侦察任务启动后,进行雷达校准,软件实时接收信号处理分机处理后的数据,由数据处理模块完成点迹处理、航迹处理、数据输出等工作;显示控制模块将目标信息按照图、表、文字的方式显示;操作员可以设置雷达的工作参数、工作模式、侦察参数等,同时实时监测各个分机的状态信息并将其显示在界面上。软件关闭后,自动保存雷达系统参数和任务参数。软件工作流程如图2所示。
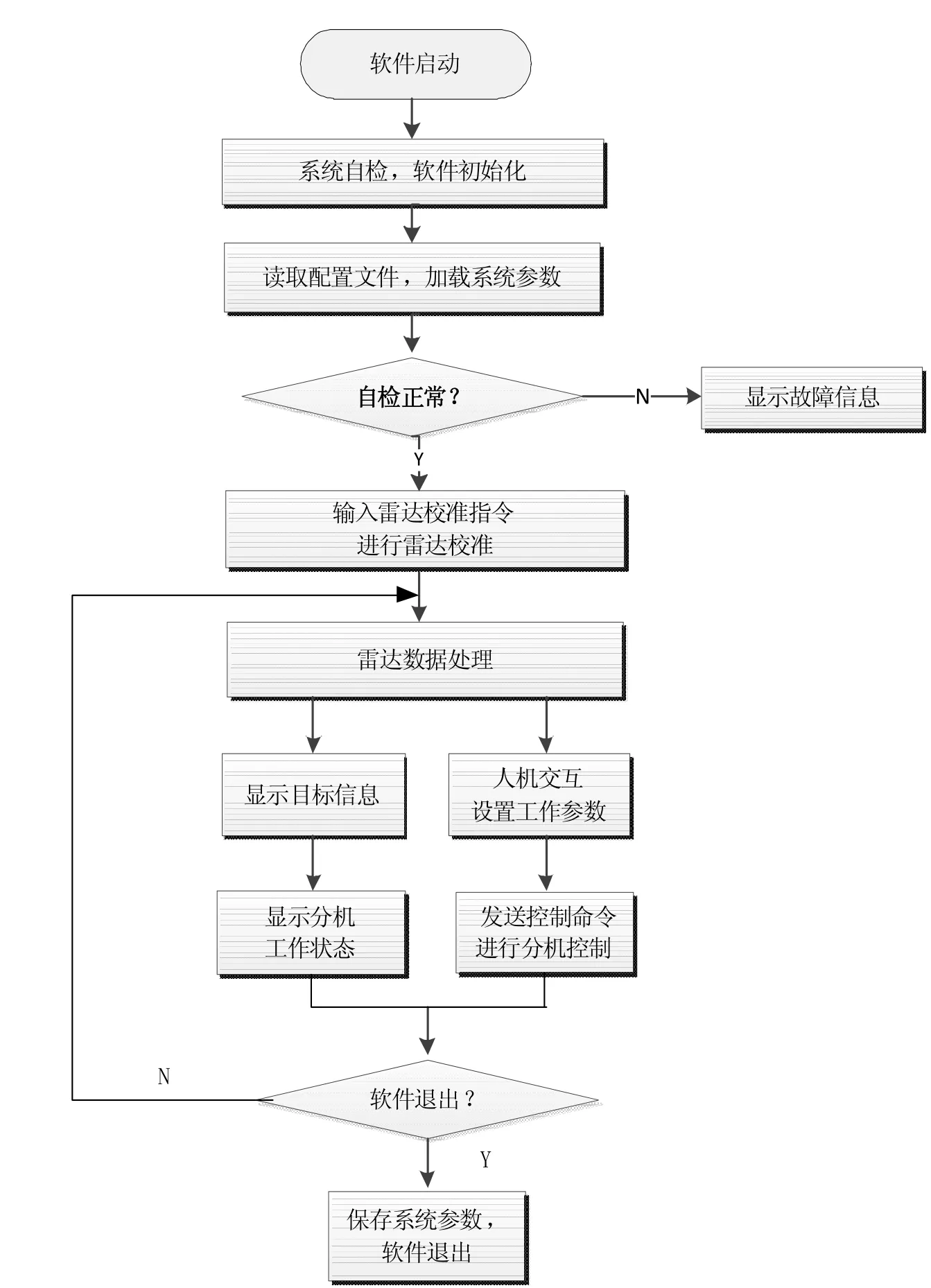
图2 软件工作流程Fig.2 Software workflow
2 显示控制设计
本软件显示控制模块的主要功能是每个周期在屏幕上以B显或者P显方式更新显示数据处理后到的目标点迹、航迹信息(包括编号、距离、方位、径向速度、坐标、目标分类等元素),显示雷达工作状态信息等。
2.1 P显
P显以正北为方位角的零度,角度按顺时针增加,距离延半径方向增加,圆心则为雷达主机所在的位置。其中距离有4种量程,分别为:5km、10km、15km、20km。P显类执行的逻辑流程:首先添加子窗口,初始化窗口位置大小,设置刷新窗口定时器,判断定时器时间,如果计时到,如果是P显则进行窗口绘图。
2.2 B显
B显坐标系纵轴代表目标的距离,横轴代表目标的方位。B显类执行的逻辑流程与P显类相似:首先添加子窗口,初始化窗口位置大小,设置刷新窗口定时器,判断定时器时间,如果计时到,判断显示方式,如果是B显则进行窗口绘图。
2.3 显示主界面
主界面左边以P显或者B显方式显示目标图形,右上方显示装订参数和雷达状态信息,包括伺服当前的方位、俯仰以及雷达工作是否正常和故障信息,右中间显示目标实时参数信息,包括距离、方位、速度、幅度等元素,右下方显示雷达操作的功能按钮,包括参数设置、标定、显示方式等。如图3所示。
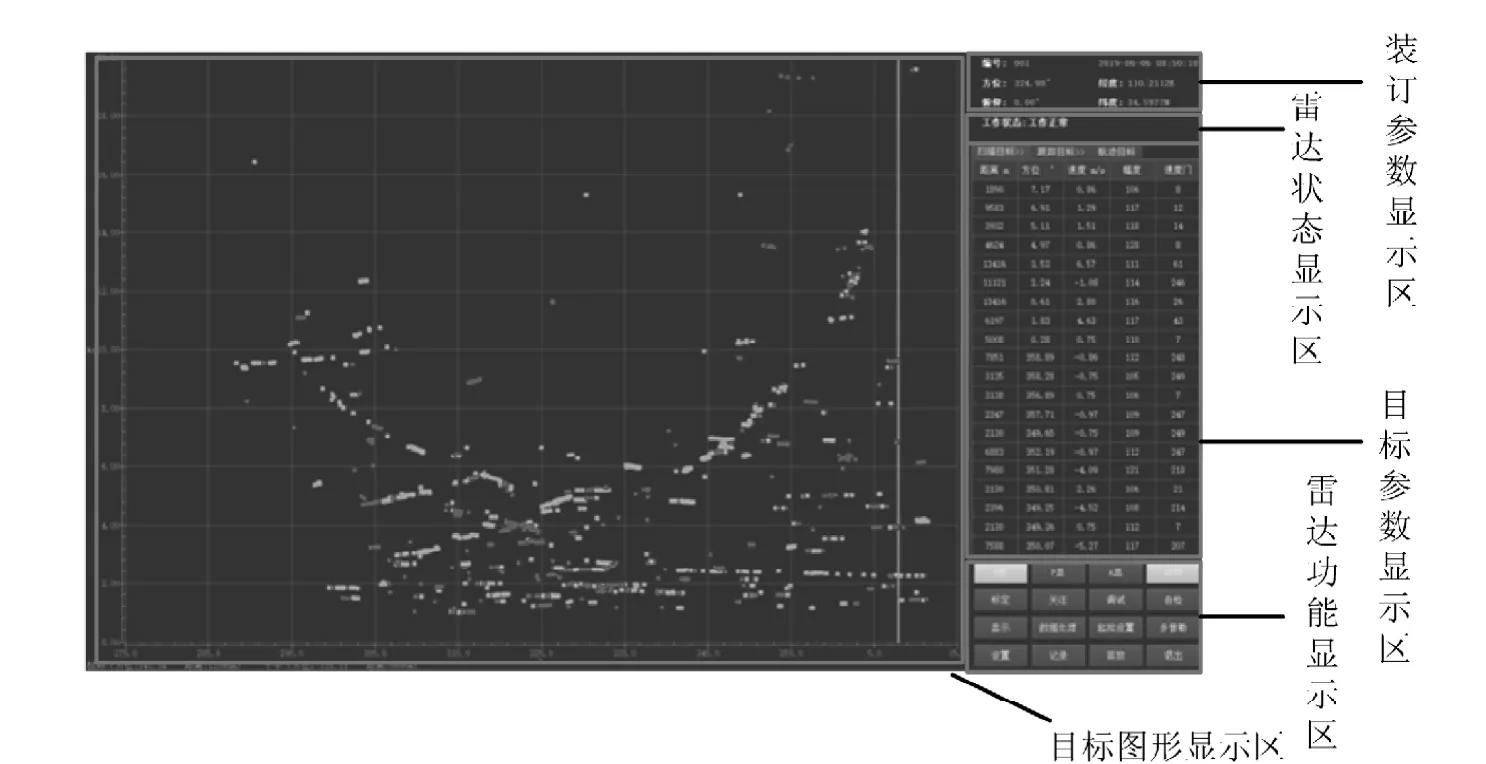
图3 软件主界面Fig.3 The main interface of the software
3 数据处理设计
点迹处理和航迹处理是本软件数据处理的核心功能,决定着数据处理效果的精度和质量。
3.1 点迹处理
点迹处理主要根据接口通信协议对信号处理后的数据进行解包;对数据进行符合性检查,检查帧信息、校验和信息的合法性;解析雷达工作状态,包括故障代码、工作频率、功放状态等信息;解析点迹目标,包括目标距离、方位、速度信息,剔除异常值也就是野值,数据合法性检验是数据处理的重要环节,对改进处理结果的精度、提高处理质量非常重要[4];对不同的帧进行帧间合并处理,由于雷达本身波束宽度的原因,可能在连续多帧数据中都包含有相同的目标点迹,因此需要在帧间对相同的点迹信息进行合并处理。点迹处理执行的逻辑流程:首先进行数据符合性检查,如果不符合则丢弃该包,如果符合则解析该包;解析点迹目标和工作状态信息,剔除野值,根据校北数据对目标进行距离方位修正,加入到目标数组中;遍历目标数组,判断是否符合帧间合并的条件,如果是则进行帧间合并。逻辑流程如图4所示。
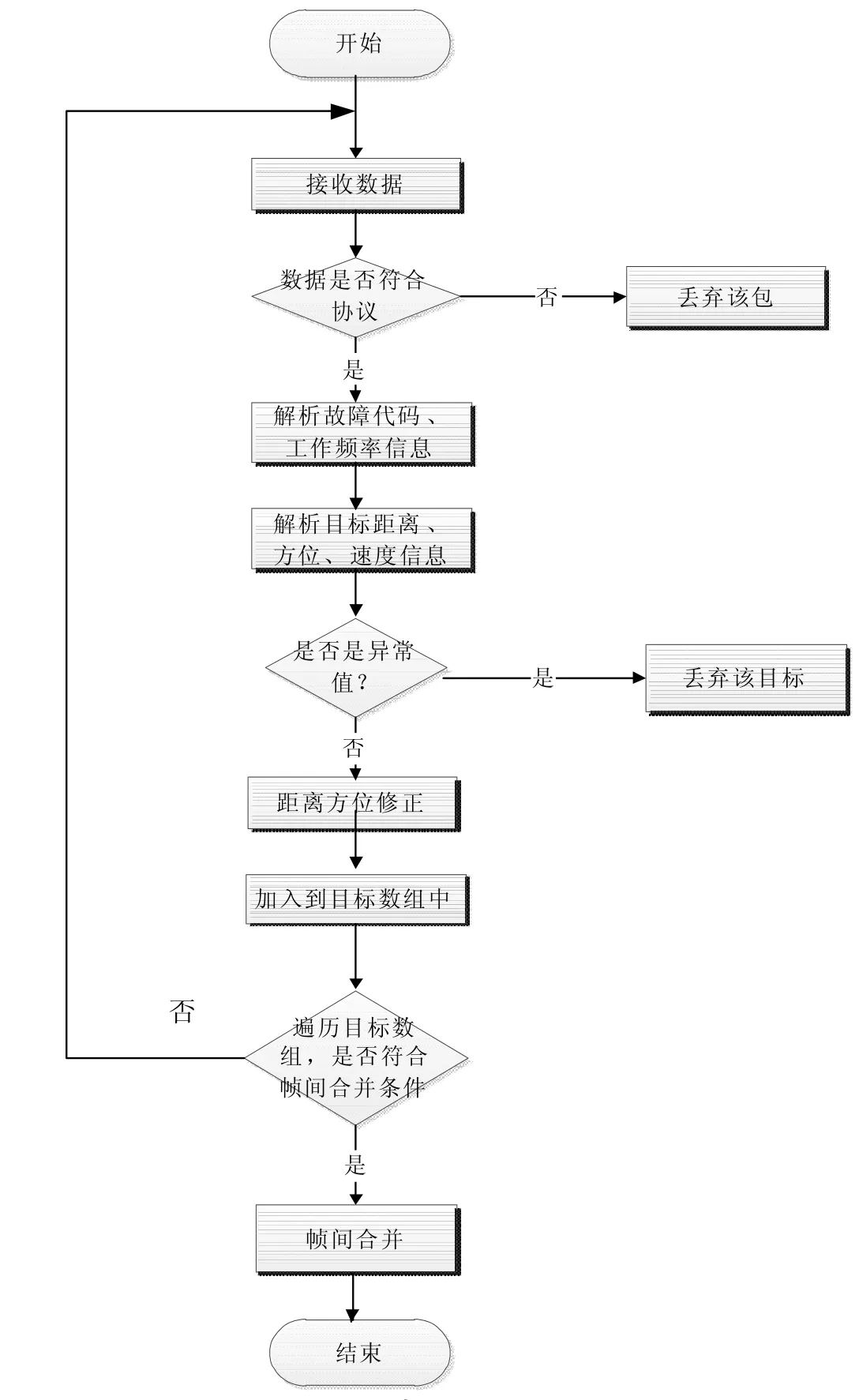
图4 点迹处理流程Fig.4 Point trace processing flow
3.2 航迹处理
在同一目标连续多帧被雷达发现后,软件会自动为该目标建立一条航迹。航迹处理就是将同一目标的点迹形成航迹的过程,在建立航迹与航迹相关过程中采用逻辑比较法,如图5所示,工作流程如下:
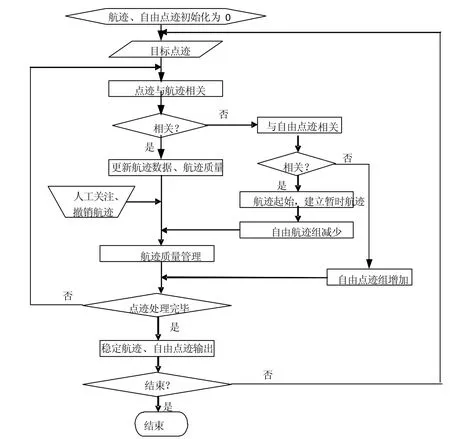
图5 航迹处理流程Fig.5 Track processing flow
(1)将第一次扫描周期的量测目标作为可能航迹,建立初始波门;
(2)将第二次扫描周期的量测点,通过直观法,建立候选的航迹,初始化航迹质量均为3,对每一个候选的航迹目标,利用一阶多项式外推的方法,建立椭圆波门;
(3)将第三次扫描周期的量测目标进行分类:满足椭圆波门内的量测目标,建立临时航迹,如果满足条件的观测超过一个,则此候选目标航迹分裂为多个航迹,匹配后,这些航迹的质量均加1;若没有满足椭圆波门内的量测目标,利用直线外推的预测值代替,建立一个临时航迹,该临时航迹质量减1,如果连续2次均没有量测目标匹配,那么删除该临时航迹;
(4)连续进行(2)(3)步处理,更新航迹时,利用滤波算法对航迹的走向进行平滑预测,及时对偏离的航迹进行修正。通过地面目标的机动性运动特征,建立目标的机动性运动模型,计算航迹目标的机动性系数,可大大提高目标预测位置的准确性。当航迹质量为6时认为该航迹为稳定航迹;
(5)在每次扫描中,落入相关波门中但并未被关联的点迹与未落入波门的点迹作为新的航迹。
4 结论
本文设计了一种基于Qt的跨平台雷达终端软件,该软件对显示控制和数据处理进行一体化设计,进行模块划分,详述了显示和数据处理的工作流程,软件将显示与数据处理有序的耦合在一起,成功应用于某雷达终端,具有很好的可移植性和可靠性,对于相关雷达终端软件的设计具有实践的指导意义。
