基于容错卡尔曼滤波的航迹融合方法探究
2021-07-28顾圆
顾圆
(中国民用航空黑龙江空中交通管理分局,黑龙江哈尔滨 150006)
0 引言
近年来,随着民航事业的高速发展,航空器数量急速增长,ATC空管自动化系统已成为空中交通管制的最主要手段之一。民航空管自动化系统能够为空中交通管制提供雷达、ADS-B等多种实时数据以保障航空安全。因此,监视数据的融合技术,决定了空管自动化监视功能的精度和可靠度,同时也是整个空管自动化系统的基础。但实际环境中会受到多种因素的影响,部分雷达等传感器数据发生异常,导致在后续的数据融合中会产生目标分裂的情况,这对空管安全工作造成严重威胁。针对AirNet空管自动化系统因雷达数据突变导致的目标分裂问题,文章提出了一种容错卡尔曼滤波的航迹融合方法。
1 监视数据航迹处理方法研究
目前,AirNet空管自动化系统监视数据航迹处理方法分为雷达航迹处理、ADS-B航迹处理和航迹数据融合处理。首先将接收到的各路雷达监视数据和ADS-B数据接入到监视数据前端处理子系统中进行初始数据预处理,处理后数据经监视数据处理单元数据滤波后,输出单路航迹,最后将多雷达的单路航迹与已验证的ADS-B航迹信息进行融合,生成综合航迹,如图1所示。
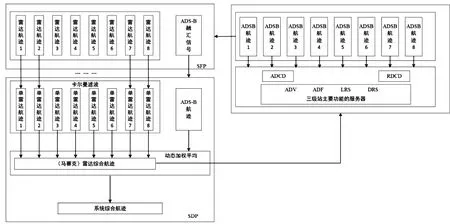
图1 AirNet空管自动化系统监视数据处理流程Fig.1 Monitoring data processing flow of AirNet ATC automation system
单雷达数据采用卡尔曼滤波法,对每一路雷达航迹分别进行滤波去噪和动态监测,从而得到目标航迹位置信息的估计值。再使用交互式多模型探测点迹信息与数据库中的航迹信息的相关性[1],并对目标的轨迹进行滤波处理。滤波后的数据经比较二次代码、位置、航向等重要信息,对相邻周期目标计算相关性,同时给予对应的航迹号。
多雷达数据常采用数据处理方法一般分为[2]:马赛克处理方法、加权融合处理方法和可变更新处理方法。马赛克多雷达处理方法主要应用于一个区域内覆盖的一个或多个雷达时的多雷达数据融合,最后生成单雷达航迹。可先将空域范围划分为多个马赛克单元,并确定每个单元内雷达探测目标效果的优先顺序,当某一目标输入马赛克单元后,使用该单元最高优先级的雷达航迹更新该系统航迹,生成单雷达航迹。获得单雷达航迹后,在使用加权平均融合法,对多雷达数据和其他监视源的航迹数据进行融合,进而获得系统航迹。
2 单雷达数据突变引起的问题及解决方法
以我局空管自动化系统为例,因单雷达信号突变引起的多架航班目标分裂已属于普遍存在的问题,通过对其进行分类研究,得到导致目标分裂的原因,具体论述如下。
(1)进近反映航班CES5612 A551出现持续目标分裂。因长春雷达送入自动化监视数据数据的高度数据错误,与融合后得到的目标综合航迹相差2000~3000m,高度差异过大,导致系统将雷达发现的错误目标识别为另一个目标,从而出现目标分裂现象。(2)进近和塔台管制员反映SDD中部分航班出现目标分裂并都是一次目标。因本场二次雷达部分监测目标丢失,仅剩一次航迹。但移动雷达正常,所以在融合信号里,就出现了同一个航班的一次航迹和二次航迹,出现目标分裂现象。一般解决方法是查询MSFP、MSDP日志、SDD回放和雷达质量监测系统,逐一监测雷达信号质量,查出引起目标分裂的问题雷达。此方法耗时较长,效率较低并严重影响空中交通指挥,易引发安全事故。针对上述问题,本文采用了容错卡尔曼滤波方法进行航迹融合。
3 基于容错卡尔曼滤波的航迹融合方法
3.1 容错卡尔曼滤波器
本文提出的基于容错卡尔曼滤波的航迹融合滤波器,如图2所示。其中,测量值是根据卡尔曼滤波器输出的估计误差及位置误差而得,检错器的参考量采用的是已验证的ADS-B四个周期内的平均值的估计误差及位置误差,最后通过检错器对各部雷达输出的航迹信息进行检错隔离。

图2 航迹融合滤波器方法Fig.2 Track fusion filter method
3.2 容错卡尔曼滤波故障检测
卡方测试法是随机动态系统故障检测的常用方法,通常可以分为两类:残差卡方检测以及状态卡方检测,其中状态卡方检测又可根据状态传播器的数量分为一个状态传播器的状态卡方检测和两个状态传播器的状态卡方检测。
本文采用了带有两个状态传播器的并行结构的状态卡方测试以及残差卡方波测试同时作为故障检测器,如图3所示。当状态卡方测试或残差卡方波测试检测到故障时,则mg=0,否则mg=1。检验统计量服从卡方分布如公式(1)所示:


图3 故障检测Fig.3 Fault detection
其中,dε的阈值由错误警告率决定。
3.3 基于容错卡尔曼滤波的航迹融合方法
系统综合航迹是8个雷达航迹和一个ADS-B航迹信息首先通过容错卡尔曼滤波器,得到各个航迹的可信度,再根据可信度分配权值进行数据融合,最后获得一个最优的系统综合航迹信息[3]。具体的航迹融合方法如图4所示。

图4 容错卡尔曼滤波的航迹融合方法示意图Fig.4 Schematic diagram of track fusion method based on fault tolerant Kalman filter
各个雷达的输出权值可根据每个雷达输出航迹误差计算得出,如雷达1的权值计算如公式(2)所示:

其中,σi表示雷达i输出误差的方差。融合后的最佳航迹可通过以下公式计算得出:


其中,wi表示雷达数据的权值系数,mi表示雷达的故障系数,(x,y,z)表示坐标数据,i表示第i个雷达,若雷达的某一数值报错则m值为0,否则为1。
具体的算法步骤如:(1)根据雷达数据计算目标位置的估计值与误差值。采用卡尔曼滤波算法分别计算单雷达目标位置的误差值以及误差状态的预测值和估计值。(2)计算各个雷达的故障系数。利用第一步计算得到的估计值与误差值,采用卡方检测,分别对每个雷达的航迹进行残差卡方测试与状态卡方测试,得到每个雷达的故障系数。(3)计算各个雷达的权重系数。首先戈恩局各个雷达的输出坐标值,计算误差与方差,然后根据公式2计算各个雷达的权重系数。(4)最优化雷达数据融合。结合步骤2与步骤3,以及公式(3)、(4)、(5),对多雷达数据进行融合计算,得到容错卡尔曼滤波后的位置信息。
4 结论
本文针对AirNet空管自动化系统因雷达数据突变导致的目标分裂问题,提出了卡方波状态检错和卡尔曼滤波器结合,进行在线故障检测和错误隔离,得到可信度后再对其进行数据融合的航迹融合方法。
