无人驾驶技术对城市空间的影响初探
——基于中国(上海)自由贸易试验区临港新片区探索性方案
2021-07-27徐晓峰
徐晓峰 马 丁
技术更新是城市发展的原生动力之一。从马车时代到汽车时代,从电报时代到网络时代,每一次重大新技术的出现都会带来城市空间的变革。那么从有人驾驶到无人驾驶时代,城市又会发生何种变化呢?本文在厘清无人驾驶技术自身特点的基础上,探讨该技术将在何种程度上影响城市空间的结构和生产逻辑,并以中国(上海)自由贸易试验区临港新片区(以下简称“临港新片区”)为例,试图提出一个由无人驾驶主导的城市实践模型。
1 无人驾驶技术与城市实践
关于无人驾驶的技术研究,早在20世纪20年代就开始了最初的尝试。到了1989年,卡内基梅隆大学第一个提出使用神经网络算法进行无人驾驶的研究,奠定了现代无人驾驶算法的基础。2010年代,随着移动互联网的普及,5G通信技术的完善,万物互联概念更加深入人心,国内外的科研院所、网络科技公司、汽车厂商纷纷开展研究,无人驾驶技术进入实质性的开发生产验证阶段。
1.1 无人驾驶技术发展情况综述
无人驾驶技术由无人驾驶汽车和道路设施两部分构成。无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,依靠车内以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。道路设施包括车道中心指引雷达、路面传感、气象监测、交通信号引导指示等;同时道路基础设施要素资源与交通环境感知全面数字化,为车路互联道路的基础设施端提供重要保障[1]。
(1)驾驶系统
美国高速公路安全管理局(NHTSA)和国际自动工程协会(SAE)将自动驾驶分为多个等级(见表1),分别是L0—L5级,对应人工驾驶、辅助驾驶、部分自动驾驶、条件自动驾驶、高度自动驾驶和完全自动驾驶。

表1 自动驾驶等级分级表Tab.1 Autonomous driving levels
目前的自动驾驶系统正处于从高级辅助驾驶系统到无人驾驶系统的过渡阶段。防碰撞紧急制动的辅助驾驶系统和车道识别提醒偏离车道技术是当下较为成熟的驾驶系统功能,已在多家车厂多款车型上配备。而特斯拉已经实现了部分自动驾驶功能系统的量产化,在前车跟随场景中可以实现车辆对方向盘和加减速的多项操作提供驾驶,司机负责其余的驾驶动作。高度自动驾驶和完全自动驾驶系统目前仍在进行不同程度的研究测试中,还没有实现量产。
(2)车辆设备要求
目前量产车上配备多角度摄像头定位、雷达辅助定位、GPS定位、移动网卡等有关设备,能很好地应对微观、中观、宏观定位以及交叉定位辅助,保证车辆实时位置信息的准确性。同时,车辆各个重要的操作部件和运行部件配备不同传感器实时监控车辆性能,将车辆状态反馈到后台数据中心实时检测车辆状态,作为车车互联、车路互联的车辆端的重要保障。
(3)道路设施相应要求
车道中心指引雷达、路面传感、气象监测、交通信号引导指示作为无人驾驶的重要道路设施,目前虽然没有做到量产,但是已经在封闭路段进行测试。这些将为实现道路基础设施要素资源与交通环境感知全面数字化,作为车路互联道路基础设施端提供重要保障。
(4)应用场景
已经实现量产的车辆应用场景如AR图像识别车辆路标、行人、车道、障碍物,车辆行驶过程中在仪表盘或者中控上进行可视化,辅助驾驶员进行判别。驾驶过程中的紧急制动应用则可以有效减少追尾事故的发生概率。特定场景中的货运、客运已实现无人驾驶的运营,例如在一些产业园区、科研院所内进行的条件自动驾驶。
1.2 无人驾驶主要技术特点分析
与传统交通模式相比,无人驾驶系统有以下优势。
(1)单车运力优势。无人驾驶技术和移动互联网充分结合,使得单车搭载的乘客量得以显著提升。掌管城市的高层级人工智能将会调配每个人的时空出行需求,根据高盛发布的《2025汽车行业预测报告》,现汽车闲置时间高达95%。随着无人驾驶技术的成熟,将会更加有效配合人、车资源。而未来交通工具闲置率将降至5%。无人驾驶时代,共享交通工具的运力将是现在客运车的10—30倍[2]。
(2)道路体系优势。交通工具的行驶速度和路线选择将由掌管全城的人工智能统筹协调,理论上将不存在传统道路体系的拥堵问题,不需要快慢车道,移动速度在全局统筹的视角下追求单车最优,行驶速度可以根据路况由系统实时调控。方格路网将成为主流,统筹协调使得整个区域的交通效用最大化。道路体系将会变得扁平化,交通分散,灵活性大;道路服务能力将得到显著提升。同时,5G支持的高速信息流、物质流传输运算将支持客运、货运交通工具在时空上实现二元智能分离。
(3)空间节约优势。传统机动车道1根车道宽度一般为3.0—3.5 m,而1辆机动车的宽度只有2 m左右。剩余的1 m左右的空间实际上是考虑人的不确定因素而预留的容错空间。如果全部使用无人驾驶的话,车辆将会精准行驶,车辆之间也可以保持更近的距离,而不用预留这么多的容错空间。因此车道宽度会缩减,城市的道路面积将大大压缩,为其他功能留出更多的用地空间。同时由于采用大量共享交通,城市所需的停车空间也将大幅减少。
1.3 无人驾驶技术现有实践案例
国内在无人驾驶技术方面进行的实践主要有:临港新片区物流园区在12 km的封闭路段测试无人驾驶,未来将在园区路网级别进行落地,以期通过数据管理平台来调度自动驾驶车辆,应用于临港新片区这类封闭场景的生产作业[3]。百度阿波罗在雄安新区进行车路互联,已经能够应用于快速路、静态交通、城市道路等场景。同时对解决雄安新区未来可能发生的交通拥堵,对单车及时预测信号灯相位、危险路段识别等驾驶安全提升等方面,正在进行落地实验[4]。
国外案例有日本丰田“编织城市”。它设想打造一个灵活的街道网络,致力于设计更安全且对行人更友好的交通流线(见图1)。街道实现了更快的自动驾驶与物流运输的优化,休闲长廊供微型交通工具使用,线性公园让居民可以在自然环境中自由漫步。这3种街道类型被编织成3 km×3 km的城市街区,每个街区只有通过散步道或线性公园才能进入。编织网格的城市结构可以扩展和收缩,以适应不同的城市规模与功能[5]。

图1 日本丰田“编织城市”效果图Fig.1 The concept of Toyota's "Weaving City"
在谷歌为多伦多政府打造的“明日之城”中(见图2),私人车辆被禁止驶入这座城市,全部由完全自动驾驶的大运量公交、满足精准化需求的小运量无人驾驶出租车和共享单车代替。货运体系则采用机器运输所有货物,且只能在全新开辟的地下公路中运行,类似于智能货运机器人模式,在很大程度上提高了城市的货运配送效率,并且通过客货分离的手段有效地缓解了地面的交通压力①Sidewalk Toronto官方网站[EB/OL].https://www.sidewalktoronto.ca/。。

图2 多伦多“明日之城”概念平面图Fig.2 Conceptual plan of Toronto's "City of Tomorrow"
2 对城市空间的影响分析
从国内外的先行城市实践看来,无人驾驶技术的探索主要集中于无人驾驶技术的落地和城市道路体系的适应性设计。由于展开实践的区域并不大,还难以看到对城市整体空间的显著影响。不妨进一步设想,如果未来无人驾驶成为主导交通方式,整个城市都运行无人驾驶车辆,则其对城市的影响将不再局限于交通方面。笔者认为从无人驾驶自身的技术优势、系统特征来分析,可能会对城市产生以下3个方面的深刻影响。
2.1 促进城市结构从层级化到扁平化
现代城市规划起源于田园城市、马丘比丘等经典理论[6],核心思想是城市等级和功能分区。一方面,随着城市各系统技术和理念的不断发展和城市空间不断累积生长更新,城市居住、工作、游憩和交通这几类空间已经相互融合与复合,城市各中心之间以及中心和边缘的差异在逐渐缩小[7]。另一方面,城市管理和治理手法的进步使得城市空间内生层级结构逐渐简化。这些都促进了现代城市从内在逻辑到空间表征日趋扁平化。
在这些城市系统中,作为城市基础支撑系统的道路系统结构逻辑却一直没有改变。交通网络仍然通过中心到节点的点轴模式进行组织,道路起到中心之间串联和疏解的作用。无人驾驶的出现将会改变这种道路交通逻辑。无人驾驶网络不再需要层级化的物理枢纽来汇聚、组织和扩散交通,只需要强大的“智能云大脑”来合理调动交通运行。道路之间的等级差异缩小,道路主次支之间的差异基本消失,交通网络趋向扁平化,道路体系由放射状形态向网格化转变。若没有交通枢纽和中心,与之相生的城市中心也会逐渐消解,城市空间亦会加速扁平化(见图3)。

图3 层级化的城市结构到扁平化的城市结构Fig.3 Hierarchical urban structure to flat urban structure
2.2 促进城市功能从系统化到模块化转变
由于城市未来的空间结构趋于扁平化,城市功能由中心向边缘层层传递的系统性消失,那么未来城市将以何种逻辑来构成城市?笔者认为模块化将是未来城市的主要构成方式。因为在扁平化和复合化的城市空间里,城市的系统化功能会分解为更均质的微小单元。这些微小单元在空间上将被格式化为一个个的标准模块。模块将成为城市构成的基础,城市功能被分解在每个模块内组织,模块本身将由扁平化的无人驾驶道路系统连接。由此构成一个去中心化的扁平城市。
模块通过承担主要沟通作用的车行专用路来划分,每个模块内部又可以划分若干小单元,这些小单元以混行道路或者人行道路来划分。每个模块内部由混合用地构成,功能是以兼容性为标准的自下而上的组合,而非传统城市那样由中心向边缘的自上而下的分解传递(见图4)。

图4 从系统化的功能构成到模块化的功能构成Fig.4 Systematic functional structure to modular functional structure
2.3 促进城市空间从静态化到动态化转变
传统城市受限于运行效率,车道限速严重,平均车速只有20 km/h左右[8]。因此传统城市空间探讨的是相对静止的界面组织和空间关系,侧重单个建筑和小范围空间组合的效果。而无人驾驶会使城市的实际车速提高,尤其是在车行专用道上,速度可以与传统的高速公路媲美。由于没有拥堵,可以一直维持这样的速度运转。
同时,无人驾驶解放了双手和双眼,车内乘客将会更加关注窗外的风景。在连续行驶的车上,人所看到的城市是以景观序列呈现的整个城市的建筑空间组合。在这种情况下,未来对于高速车行道两侧的城市空间必须从动态化的角度去思考如何组织,将是一种关于序列的重新再设计。标志性建筑间距将拉大,城市空间像戏剧一样,有开始、发展、高潮、尾声的区分(见图5)。

图5 从静态设计到动态设计Fig.5 From static design to dynamic design
2.4 无人驾驶系统的过渡
从传统交通支撑的城市到无人驾驶系统支撑的城市空间,其间必然存在一个过渡的过程。笔者认为这种过渡时期并非如同当年马车与汽车混行的方式进行,而是通过分系统的方式分阶段实现,最终进入全面无人驾驶的阶段。因为无人驾驶与传统驾驶在系统运行上存在根本的不同,一种由系统控制的、理性高效的运行,不受情绪干扰;一种由独立个体驾驶,具有较大的不确定性和不可预见性。两者若混行,实际上无人驾驶的效率会降低到与传统驾驶相当。
过渡时期分系统的运行可以通过分时、分段、分区的方式实现。无人驾驶系统可以在地下或高架独立运行,将地面道路让给传统驾驶和行人。亦可在新建的城市分区小范围实现全面无人驾驶。无人驾驶与传统驾驶的接驳可以通过P+R的形式实现。当无人驾驶系统和技术趋于稳定以后,可以全面实行无人驾驶,地面道路作为人行和低速道路使用。
3 无人驾驶主导的城市模型实践
基于上述无人驾驶系统对城市未来结构、空间格局、街道景观等方面的影响分析,本文选择了临港新片区作为无人驾驶技术下城市模型实践的探索基地,试图进一步说明无人驾驶技术对未来城市建设所带来的变化。
中国(上海)自由贸易试验区临港新片区位于上海市域东南、全市滨江沿海的发展轴线上,远期面积873 km²,非常适合作为无人驾驶的试点区域(见图6):对高效的货运交通有着天然的需求;与其他城市片区相接但又保持相对独立的交通系统,便于系统化的操作;区域面积较大,实际上是个多中心的网络城市,具备扁平化的初步特征。因此,本文尝试将无人驾驶作为临港新片区的主导交通系统,构建一个扁平化的路网构成模式,综合考量现状路网、城市结构、功能布局等要素,最终形成无人驾驶技术主导下的城市用地和空间方案。

图6 临港新片区区位图Fig.6 Location map of Lin-gang Special Area
3.1 基本路网模块设计
扁平化的路网体系有两个主要特点:一是采用方格网作为主要的道路形式;二是道路等级体系亦扁平化,主次干道区别消失,车道数最终将趋于一致,缩窄、减少的车道空间将还给步行、骑行以及绿地和开放空间(见图7)。

图7 道路等级扁平化示意图Fig.7 Schematic diagram of the elimination of road classification
因此,研究模块的方格路网由间距1—2 km的车行专用路网围合而成。在基本模块的基础上,对于生活区和产业区采用不同的设计策略。生活区在模块街坊内部增设人车混行路网,路网间距150—300 m,适宜步行。产业区采用地下管道无人运输系统,减少地面货运压力;货运运输道路系统形成大尺度方格网,保证“7天×24小时”无人驾驶货运能高效运转,同时与生活区的通勤性路网衔接。
3.2 道路系统设计
考虑到与现存道路及外部道路的衔接,路网体系实际设计时采用了过渡策略。近期结合现状公路,将路网体系分为综合性大道、通勤性道路和接驳性道路3级道路体系;远期随着无人驾驶技术的全面升级,有轨电车、共享汽车、私家车等多种无人驾驶车辆共享路权,过渡到2级道路体系,将传统的主次支道路体系简化为车行专用路和人车混行道路2个系统(见图8)。

图8 临港新片区无人驾驶道路系统设想图Fig.8 The road system of Lin-gang Special Area
车行专用路路网由原高速路和区域交通道路为主构成,设计车速100 km/h,为双向4车道,主要服务货运车、通勤联络的无人驾驶车辆,围合形成边长为1—2 km的方形基本模块。人车混行道路网主要由原部分主干路、支路和新增支路构成,设计车速40 km/h,主要为双向2车道,其余空间为人行和休憩空间。服务接驳无人驾驶车辆,构成长宽为150—300 m的人行尺度街坊。
另外,在无人驾驶公共交通方面,将打造大中运量公交优先社区,通过轨交市域线串联机场、港口、铁路枢纽,按照1 000 m服务半径,覆盖30%的城市片区,缩短片区间通勤,加强片区之间的联系,组团内部通过有轨电车横向连接各个街坊(见图9)。围绕有轨电车站点组织15 min通勤圈,按照500 m服务半径覆盖全部生活片区和80%的核心商务区。

图9 临港新片区无人驾驶公共交通体系设想图Fig.9 Unmanned public transportation system of Lingang Special Area
3.3 用地布局
对应到空间布局上,由于扁平化路网体系的架构,规划将采用混合用地模式来构成基础的用地街坊。通过交通网格确定一个模块街坊的边长为1—2 km,街坊内通过人车混行路或步行路划分了若干个边长150—250 m的小单元。小单元内部为混合用地,依据主导功能,分成行政单元、商业单元、居住单元等,涵盖了正常运行所需的用地和设施(见图10)。
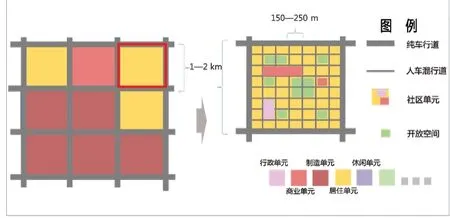
图10 模块化功能用地示意图Fig.10 Basic modular block design pattern
根据每个组团的功能侧重,在基础模块街坊的基础上进一步调整内部功能单元的用地构成比例,形成4种主要的功能模块街坊(见图11):产业模块以产业制造和仓储物流为主导功能,加入外延性功能,创造开放共享的产城融合区域;公共服务模块根据不同功能细分和侧重,容纳商务办公和生活服务等功能;生活模块在住宅用地的基础上满足生活多方面的需求,包括多层次、多样化、可负担的住房需求;田园模块作为生态单元,保留原生河湖水域,作为划分自然单元的依据,以基本农田等农林水域用地为主,含有少量建设用地。最后根据总体结构和功能体系,将4种模块落实到总图上,形成整体方案(见图12)。
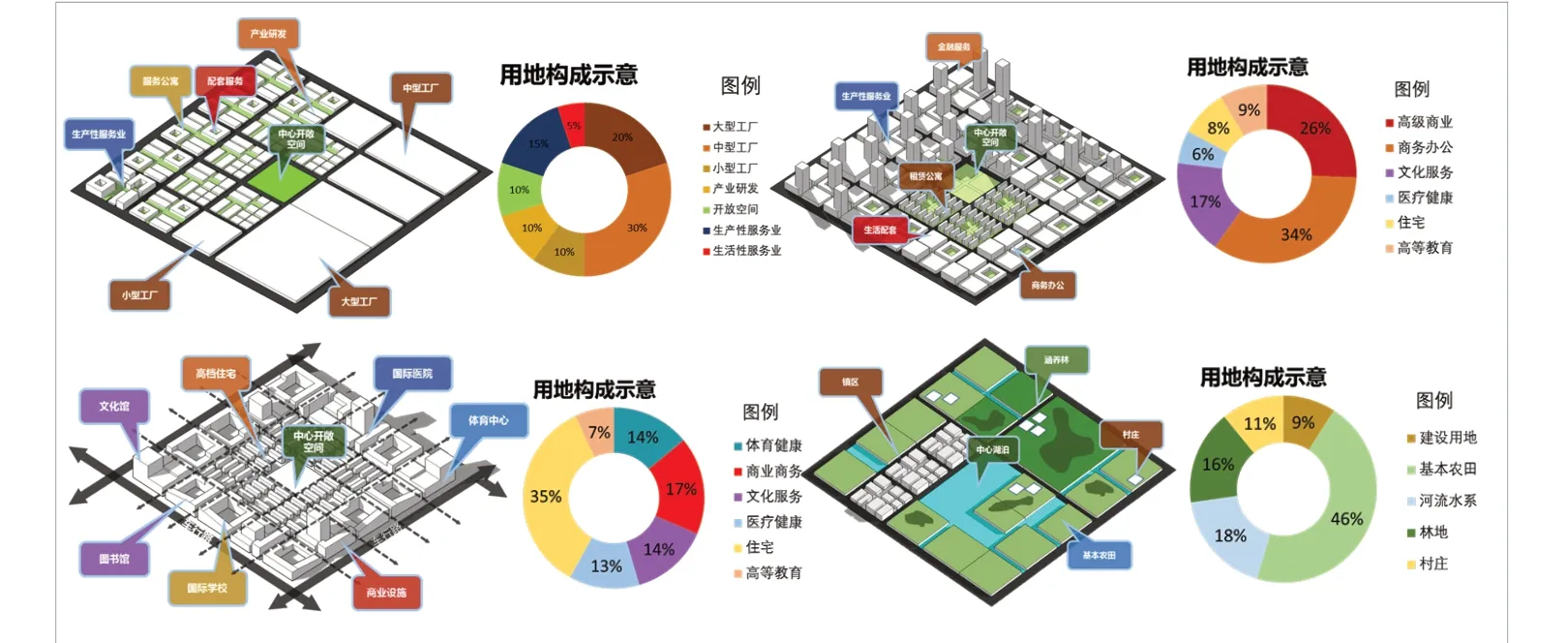
图11 4种模块示意图和田园模块示意图Fig.11 Four model block patterns

图12 临港新片区各类模块布局设想图Fig.12 Land use structure map
3.4 空间设计
根据前文的分析,无人驾驶将会带来动态化的城市空间设计。动态化的首要影响是车速的提升,人行空间和车行空间的设计车速差距变大,需要提供不同的设计策略。通过进一步深化模块街坊的空间构成,结合模块街坊内部单元的功能构成和需求,每个街坊由外到内私密性逐渐增强,形成4个不同的圈层(见图13)。

图13 模块街坊空间构成模式图Fig.13 The model diagram of the modular neighborhood space composition
模块街坊外围即第一圈层是车行专用路两侧界面。根据动态化的原则,外围街道空间由于无人驾驶后车速提升,车内乘客在视觉上感受到空间被压缩,因此设计时标志性建筑的间距要大于传统城市。为使空间序列更加明显,标志性建筑的高度也会高于传统城市。
街坊内部是人车混行道路,速度相对较低,适用传统空间的设计策略。其中第二圈层是一些服务类公共建筑,比如学校、社区中心、文体设元及配套设施。核心的位置是一整块公共绿地,是整个街坊的绿肺(单元内部也有小型开放绿地)。核心绿地之下是本街坊的集中停车场和调度中心,与城市其他的分布式调度中心处在同一个网络上,实时监控和调配车辆运营。
3.5 核心区设计
根据模块街坊和空间要素分析,进一步研究设计核心区的空间方案(见图14)。核心区总面积约10 km,规划人口约8万人,总体建筑量约300万m²,最高地标建筑高度为300 m。核心区使用研发模块、公共服务模块、生活模块和田园模块4种模块。在模块组合的基础上对城市设计元素进一步梳理,形成一条核心天际线和一个中心公园。核心天际线上布局3个地标建筑,加强整体天际线的节奏感。以中心公园作为统领,每个模块街坊内布局街坊公园,形成一主多副、廊道沟通的开放空间体系。高度设计方面,靠近核心天际线一侧为第一圈层,平均高度在100 m左右;靠近其他车行路为第二圈层,平均建筑高度约50 m;内部街坊为第三圈层,平均建筑高度约30 m;中心为开放空间。这样形成的空间既能满足微观空间设计需要,又能保证宏观城市景观的整体协调(见图15)。
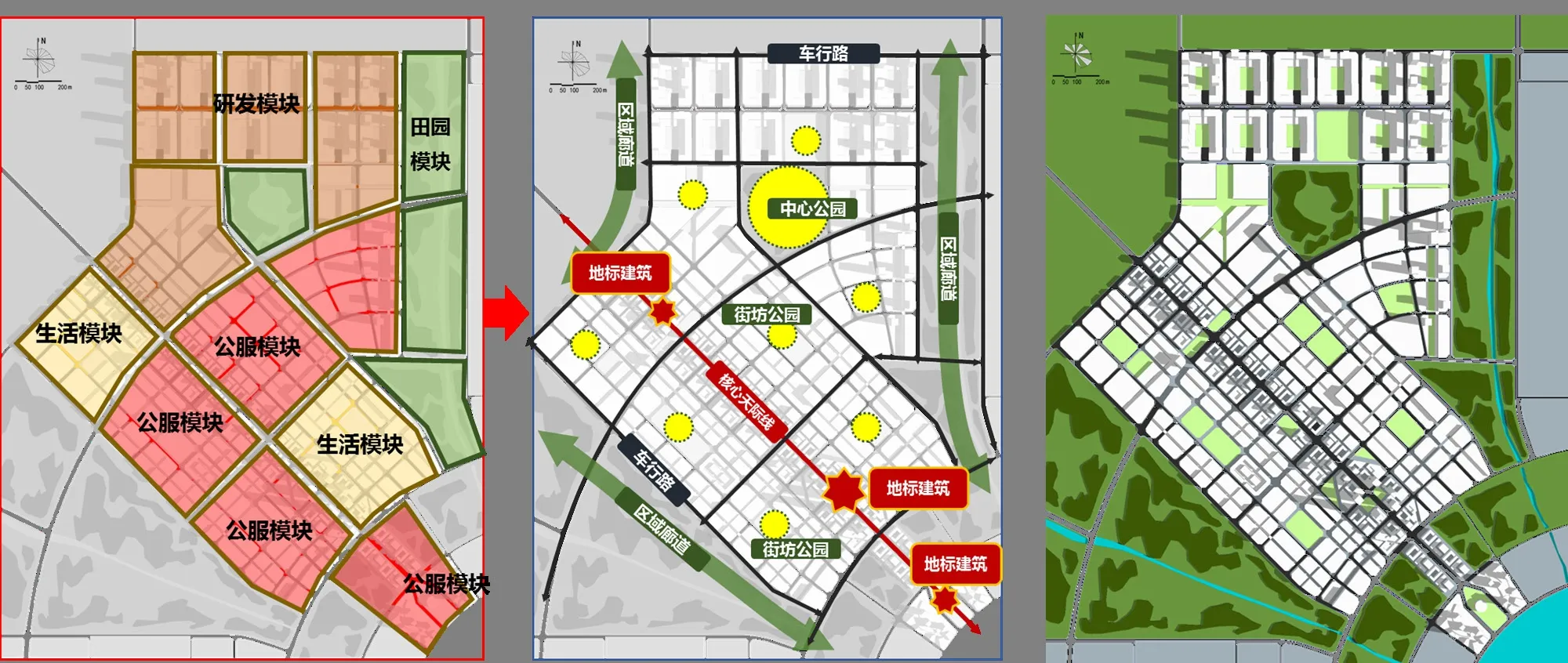
图14 核心区方案空间构成设想Fig.14 The spatial composition of the core area plan

图15 核心区空间效果示意图Fig.15 The spatial effect of the core area
临港新片区无疑将会是中国最先进的自由贸易试验区之一,本文以无人驾驶这一前沿技术作为方案的切入点和核心概念,探讨了无人驾驶技术在临港新片区落地的可能。通过对无人驾驶模块的深化研究,确定临港新片区的道路系统和用地构成模式,然后探讨核心区的城市设计,最终应用到整个片区,形成整体的空间设想方案(见图16)。
4 结语
无人驾驶技术是当下较为热门的交通技术,各种技术实践已经开展。本文在简述无人驾驶技术特点的基础上,畅想驾驶无人技术在城市规划领域可能的空间应用方式。笔者认为无人驾驶将会加速城市道路系统和城市结构扁平化,城市空间表征和人们的体验也会相应改变。未来的城市将会以更快的速度、更高的效率运行。笔者以临港新片区为例,讨论无人驾驶技术对城市空间和城市设计的影响。通过设计适用无人驾驶的全新道路网体系,划分并设计适合临港新片区的街坊模块,将临港新片区所需功能落地;最后通过城市设计对整体空间格局和要素进行进一步的优化调整,形成最终的空间s设想方案。
当然城市作为复杂的巨系统,不会因为某种单一技术而改变,无人驾驶对城市空间产生的影响仍有很大的不确定性。一方面,无人驾驶技术本身尚不成熟,仍处在不断的演进之中,城市是否会全面转向无人驾驶仍是个未知数。2015年美国密执安大学交通研究中心的报告显示无人驾驶的事故发生率是有人驾驶的1倍多;之后,谷歌给加利福尼亚政府的报告显示数据几乎相同[9]。另一方面,交通只是城市的一个子系统,城市的发展还受到政治制度、社会经济、人文习俗等多方面的影响,城市空间的改变更多的是一个渐变的过程,无人驾驶是否能够被社会全面接受有待进一步验证。然而作为规划师应该以超前的视角看待这些技术,因为它们很可能在未来10年甚至更短的时间内变为必须面对的现实。这些新技术的出现无疑会对城市规划带来新的挑战。