连续复合曲线有砟高铁接触网施工技术研究
2021-07-27杨清太
杨清太
(中国铁建电气化局集团有限公司 北京 100043)
1 前言
在有砟高铁线路无轨条件下、曲线半径小的区段,接触网承力索展放后的倒装工序施工方法效率不高,安全性不强。目前国内有砟常动轨铁路接触悬挂的施工方法主要有2种:一种是根据轨道精调整到位后的轨面进行吊弦数据采集,然后根据采集后的数据与设计值进行对比,调整之后再复核无误,再用软件或者Excel表进行计算,该种方法操作方便,数据精确,但完全受制于站前轨道工程施工进度,基本无法满足有砟铁路的现场实际需求,目前仅在无砟轨道上使用。另一种是直接根据设计承力索高度进行计算,省去吊弦数据采集工序,在预配吊弦时适当加长可调节余量,该种方法操作简便,但误差很大,且均为可调吊弦,无法满足整体吊弦需求,当轨面精调整完成后,需要进行全线的吊弦调整,且所有吊弦均需要调整一遍,工作量非常大,且难以保证导线的平顺度[1],整个施工过程持续的时间太长,施工效率低,受制于站前轨道工程施工进度,无法满足施工工期要求。针对目前国内有砟铁路接触网施工现状,下面结合新建吴忠至银川段客运专线工程,开展了连续复合曲线有砟高铁接触网施工技术研究。
2 工程概况及重难点分析
新建吴忠至银川段客专铁路(DK564+500~DK640+456.85),线路长度 75.957 km,设计时速250 km的有砟高速铁路,接触网正线采用弹性链型悬挂[2]。银吴客专全线初步设计与规划经过协调增加了几个车站,故增加了多段曲线,整个线路曲线条件复杂,平曲线与竖曲线连续复合段增多,小半径曲线量大大增加,加之项目施工工期短、工程量大,站前土建施工及轨道工程与站后四电工程需同时完工,接触网调整无法根据轨道精调后的线路条件进行施工,给接触悬挂中的承力索安装带来了较大的难度,对吊弦测量及计算带来更大的难度,同时在接触网关节及分相区段的接触网参数调整存在导高非自然抬升问题,两支接触悬挂间距问题。对不同线路曲线半径和超高及非自然抬升的定位点所处的位置,要研究解决小半径大超高区段接触网定位点非自然抬高问题,必须研究有砟铁路轨面变动情况下接触悬挂参数采集、处理、计算为一体的施工技术,才能在轨面成型前完成接触网悬挂安装及精调整,同时保证稳定的弓网关系对定位装置参数的要求[3]。
3 研发承力索倒装装置和开发接触网吊弦数据处理及计算软件
3.1 新型承力索倒装装置研发
(1)第一种新型承力索倒装装置
根据目前国内电气化铁路及轨道交通承力索倒装至承力索座内的施工方法中存在的不足,结合不同的实际施工场合,研发了一种新型承力索安装装置(获专利,专利号:ZL201720695545.8)[4]。该装置包括受力杆、连接杆和手扳葫芦,受力杆为其中一端设有单耳,另一端为开口的空心钢管,在受力杆的单耳端安装有用于与平腕臂管连接的第一钢管连接环,连接杆其中一端通过第二钢管连接环与受力杆固定连接,另一端设有与平腕臂管连接的第三钢管连接环,受力杆和连接杆分别通过第一钢管连接管和第三钢管连接环与平腕臂管连接,连接后的受力杆与连接杆均置于平腕臂管上方,手扳葫芦通过其安装挂钩挂设在受力杆的开口端。该装置结合了便携性和可调性,可有效地运用在任何场合中承力索倒装至承力索座内的施工,避免了施工过程中一些不可控因素带来的安全隐患,且较大程度地提升了施工效率,保证施工作业安全。承力索倒装装置示意见图1。
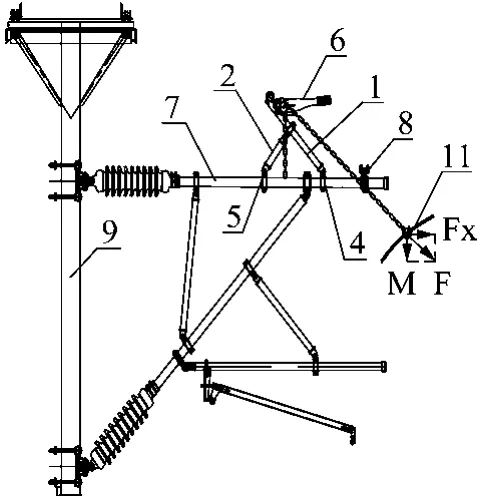
图1 承力索倒装装置示意
(2)第二种承力索倒装装置
根据目前国内电气化铁路、轨道交通及电力工程施工中电缆或裸导线在路基和桥梁区段的施工方法中存在的不足,结合不同的实际施工场合,研发了一种新型组合式承力索归位装置(获专利,专利号:ZL201820775653.0)[5]。该装置包括组合承力索外拉装置和线缆支撑杆,组合承力索外拉装置包括双排J钩、尼龙绳、单钩滑轮和绞磨机,双排J钩钩住承力索,尼龙绳连接双排J钩,通过三个分别固定在承力索所在支柱的基础螺栓、对面支柱的承力索座下扣环和对面支柱基础螺栓的尼龙单滑轮,最后尼龙绳与绞磨机连接,线缆支撑杆是靠施工人员支撑承力索。该装置结合了便携性和稳定性,可有效地运用在路基段或桥梁段的承力索归位施工,避免了施工过程中一些不可控因素带来的安全隐患,且较大程度地提升了施工效率,保证施工作业安全。组合式承力索倒装装置示意见图2。
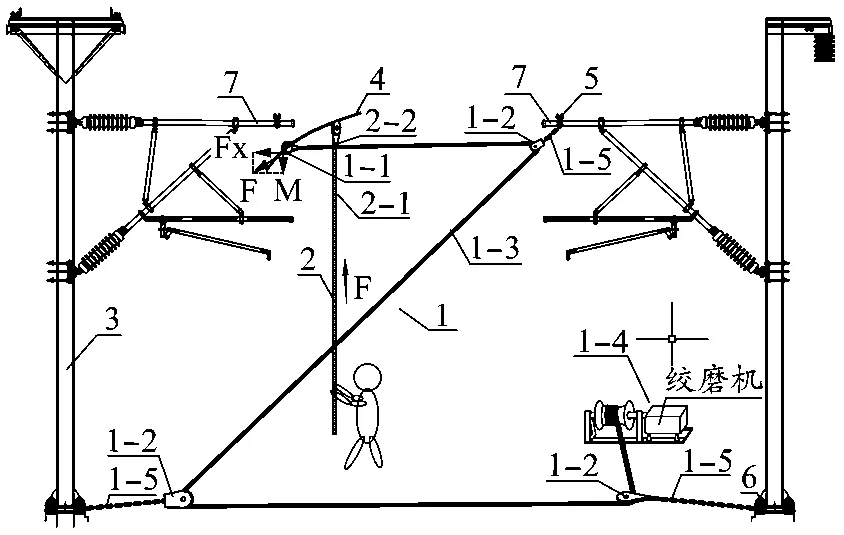
图2 组合式承力索倒装装置示意
3.2 有砟常动轨铁路接触网吊弦数据处理及计算软件开发
根据轨面参数变动情况与承力索、接触线导高拉出值等参数的关系,在CAD中将各参数达到设计值后的模型和现场实际模型结合进行对比分析。依据计算吊弦所需的数据,即承力索相对设计轨面高度和相对设计轨面拉出值,对计算过程进行推算,得出各数据间的公式关系。根据得出的计算公式与相应的数学关系,基于C++语言基础MFC窗体开发工具自主开发了有砟常动轨铁路接触网吊弦数据处理及计算软件,并获得国家版权局软件著作权授权(登记号:2018SR921011)[6]。该计算软件应用于项目中,完全摆脱了被轨面调整限制的局面,避免了大面积的交叉作业,全面提升了施工效率。
4 关键施工技术
4.1 施工流程
承力索倒装→标准轨面数据计算→轨面参数测量→承力索高度测量→数据平差计算→软件计算吊弦所需参数→吊弦预配→吊弦安装→接触悬挂调整→参数复核测量。
4.2 连续复合曲线承力索倒装施工精度高效控制技术
在吊弦数据采集前,需将承力索倒装一次安装到位,并保证腕臂偏移量等关键参数的准确性。为避免承力索倒装施工效率低和精度不高导致吊弦数据采集无效,综合分析线路连续复合曲线的要素,结合现场施工,总结提升接触网承力索倒装施工效率和质量的技术,利用自主研发的两种新型承力索倒装装置进行施工。该装置较大程度地提升了施工效率,保证后期施工进度和吊弦参数采集精度。
采用五线激光水平仪和标尺配合使用测量确认腕臂预偏值。在现场用五线激光水平仪找出支柱中心即平均温度下腕臂准直中心,开出纵向激光轴线,在承力索上标记好中心点位置,根据腕臂偏移表用标尺测量出偏移量并在承力索上做好标记,此标记即为承力索护线条中心安装位置也是承力索倒装位置。
4.3 复合曲线段吊弦计算参数相对值测量技术
根据计算吊弦所需的数据,主要为承力索安装高度。承力索高度是基于轨面高度的一个参数,由于轨面锁定前是变化状态,特别是对于连续复合曲线区段,超高和竖曲线变化相结合的变化量较多,故需要测量轨面与承力索高度之间的相对值,且需同步测量现有轨面高度和承力索高度,再根据现有测量轨面高度与标准轨面高度之间转换的差值,计算得出承力索与标准轨面的高度[7]。
4.3.1 标准轨面参数计算
在制定吊弦参数相对值测量计划前,需要将全线标准轨面的相关参数计算出来,主要有标准低轨轨面高程,标准轨面超高。
(1)标准低轨轨面高程计算
根据全线竖曲线(坡度)表,利用竖曲线高程计算方法将全线每根支柱对应里程的标准轨面高程计算出。
①先求变坡角以求得竖曲线长度
相邻两条坡度线的坡角差,通常用坡度值之差代替,用ω表示:
ω= α2- α1≈tg α2-tg α1=i2-i1
②竖曲线各要素公式推导
竖曲线长度L:
L=XB-XA=Ri2-Ri1=Rω
竖曲线切线长T:
T=T1=T2
竖曲线上任一点竖距y(竖曲线高程与切线高程差)[8]:
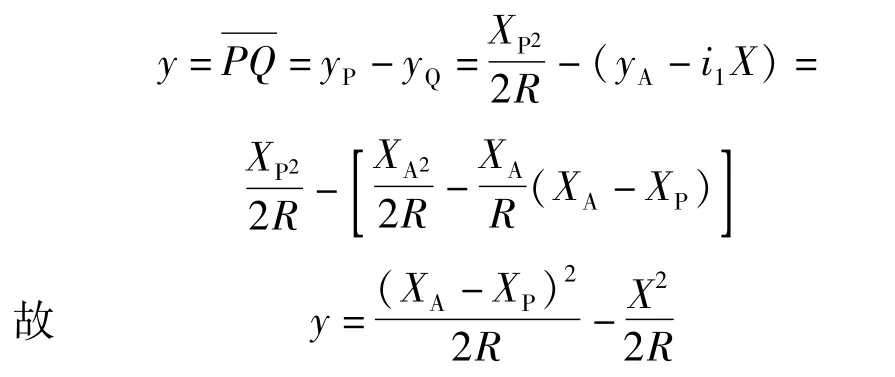
③逐点里程高程计算
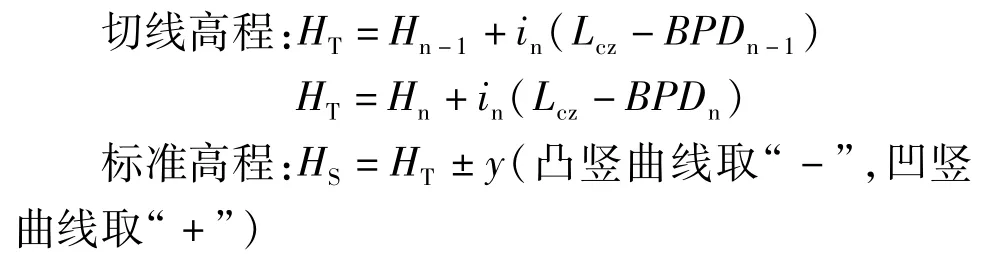
式中,y为竖曲线上任一点竖距;Lcz为竖曲线上某一点里程坐标;BPDn-1为变坡点起点或终点里程坐标;in为切线坡度;直坡段上,y=0,变坡段上,y=X2/2R;X为竖曲线上任一点离开起(终)点距离。
(2)轨面设计超高计算
根据设计给的曲线表,按照曲线超高和里程的线性关系将缓曲段各支柱对应点的轨面设计超高计算出来。
4.3.2 闭环测量曲线中一定距离内穿插测量已知CPⅡ点桩的偏差控制技术
(1)在一个测量闭环曲线内,在一定距离内穿插测量已知CPⅡ点桩,控制后期平差计算的误差值[9]。
①高程测量前:规划好测量径路和每个测量点,每条测量径路分别以一个已知CPⅡ桩点作为测量路径的起始测量点,并将沿测量路径分布的已知CPⅡ点和接触网支柱对应轨面点分别设置为一个测量点,第一次测站放置在起测量点和第二个测量点中间,第二次测站放置在第二个和第三个测量点中间,依次进行测站放置,直至将所有测量点测量完成。
②测量过程中误差控制:要求仪器机械调平后,再利用电子气泡进行校准。通过双轴检验,对处于大地坐标系下的仪器进行补偿。测量人员,应准确找出每一跨的中心位置,减小视距误差。电子水准仪测量过程中,前后视的距离之差不可超过3 m,整个测量过程累积视距差不得超过10 m。同一支柱在测量时必须保证前视、后视是同一位置。特别是测量处于上坡或下坡的地段,如果对应支柱位置发生变化,则前视后视测量的高度误差比较大。
③数据平差计算:第一步,采用电子水准仪测量完成后,从仪器中导出高程测量数据。第二步,利用平差软件进行数据处理。将测量得到的高程测量数据按照平差软件的要求和格式进行处理,处理后得到软件录入数据表;打开平差软件《COSAWIN98-控制测量数据处理通用软件》,导入软件录入数据表,进行平差计算。
(2)采用高精度电子水准仪及平差计算。
①水准测量是利用水准仪提供的水平视线,借助于带有分划的水准尺,直接测定地面上两点间的高差,然后根据已知点高程和测得的高差,推算出未知点高程。A、B两点间高差hAB=a-b。
②A点为后视点,A点尺上的读数a称为后视读数;B点为前视点,B点尺上的读数b称为前视读数。因此,高差等于后视读数减去前视读数。
③用高差法计算未知点高程。A、B两点间高差hAB后,如果已知A点的高程HA,则B点的高程HB=HA+hAB。
④电子水准仪测量精度高。
⑤采用四等水准测量可对测量结果进行平差计算,减小误差提高测量精度。
⑥由对比可知,对同一闭合线路光学水准仪测量误差为30.8 mm,电子水准仪测量误差为3.4 mm。
4.4 复合曲线段有砟高铁接触网吊弦数据处理技术
4.4.1 按照现场实际建立CAD模型
根据轨面参数变动情况与承力索、接触线导高拉出值等参数的关系,在CAD中将各参数达到设计值后的模型和现场实际模型结合进行对比分析[10]。承导线参数换算坐标系见图3。
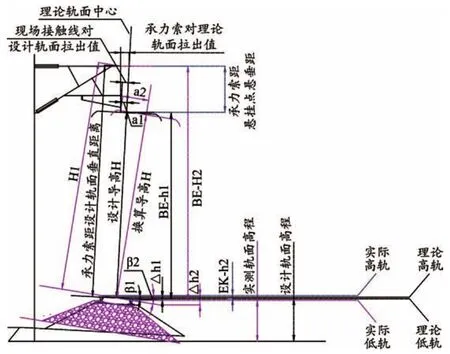
图3 承导线参数换算坐标系
4.4.2 利用软件对有砟常动轨铁路接触网吊弦数据处理及计算
根据CAD模型图建立各数据间的数学关系,依据计算吊弦所需的数据[11],利用开发的有砟常动轨铁路接触网吊弦数据处理及计算软件进行计算。
(1)单点计算:将已知数据依次输入,点击计算即得出计算和调整所需要的数据。
(2)批量计算:点击浏览;点击浏览后,显示文件夹,选择提前准备好的Excel数据表,点击导入;点击开始计算,3 s左右,弹出保存文件对话框,默认为原数据表导入文件夹,点击保存后显示计算完成窗口。见图4。

图4 承力索参数批量计算
4.5 小半径大超高区段接触网定位点非自然抬高问题研究及处理技术
在高速铁路线路半径小于2 000 m或超高大于100 mm以上的区段,采用普通矩形定位器定位方式易出现定位点非自然抬升的情况,通过对小半径大超高区段接触网定位点进行受力分析,得出定位器受力与定位器坡度、导高非自然抬升的关系,得出调整定位器形式并调整腕臂底座高度和调整线索张力两种方式,用于现场接触悬挂调整方案[12]。
4.5.1 小半径大超高区段定位点处受力分析
由于定位点处定位器拉出值调整到位后,整个接触悬挂达到静态受力平衡[13],所以对于定位器受力分析可以采用普通力学分析方式进行。正常情况下,接触悬挂调整完成后,各吊弦点与定位点的导高应相等,定位器作用于定位点处接触线的水平分力和垂直分力共同使其达到静态力学平衡。在小半径大超高区段定位点出现非自然抬升,即定位器作用在接触线上的垂直方向分力过大。故需要对定位器进行受力分析,找出垂直方向分力与水平分力之间的关系,以及对定位器坡度之间的关系,才能找到解决方案。
接触线在定位点处垂直方向受力分析,D1、D2分别为定位点两侧第一吊弦,DW为定位点。定位点处垂直方向受力分析示意见图5。
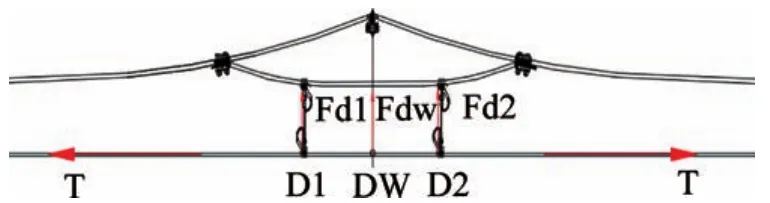
图5 定位点处垂直方向受力分析示意
接触线在定位点处所受的水平力组成为定位点处张力和曲线向心力的合力与定位线夹水平张力的力的平衡。定位点处水平方向受力分析示意见图6。
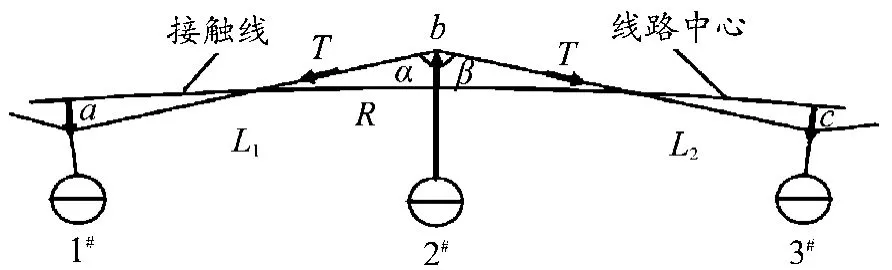
图6 定位点处水平方向受力分析示意

式中,Fx为定位器水平张力;L为跨距;T为接触线张力;R为曲线半径;a为拉出值。
根据上述定位点处水平与垂直分力的受力分析,对定位点处定位器进行综合受力分析,得出定位点处水平分力、垂直分力、定位器坡度之间的关系。定位点处定位器综合受力分析示意见图7。
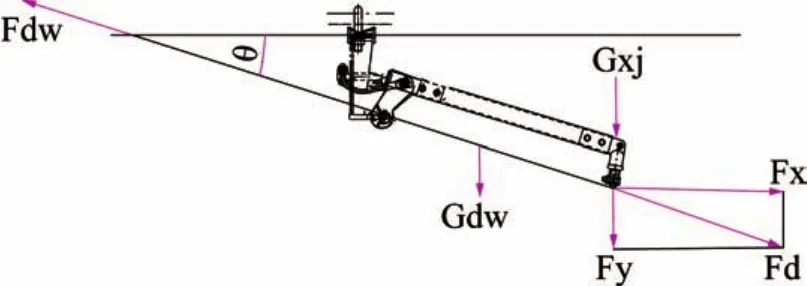
图7 定位点处定位器综合受力分析示意
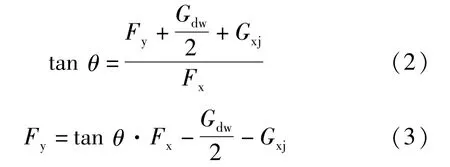
式中,Fx为定位器水平分力;Fy为定位器垂直分力;Gdw、Gxj分别为定位器与线夹自重(常数);θ为定位器坡度。
由式中关系可以发现,在达到受力平衡后,跨距一定,两侧吊弦间距一定的情况下,定位器水平分力越大,定位器坡度越小。一般情况下,定位器处定位点垂直分力只与跨距和吊弦点间距有关,但当采用折型定位器、特型定位器、软定位器则可通过人为调整改变定位器坡度,使定位器坡度由因变量变为变量,进而导致小曲线大超高区段定位点出现非自然抬升的情况。
4.5.2 小半径大超高区段非自然抬升定位点处调整选择
综上,假设线路条件250 km/h,接触线张力25 kN,支柱跨距均为50 m,针对不同拉出值及曲线半径条件下的定位器坡度进行计算。通过上述分析及计算,可对在小半径大超高区段内的一般中间定位柱、有电气绝缘要求的关节定位柱分别进行调整对策分析。
(1)调整定位器形式
在小半径大超高区段一般中间柱位置,超高大于80 mm,拉出值设置大于200 mm的曲外定位的定位器坡度小于8°,无法满足设计最小定位器坡度要求,机车行进过程中易打弓且动态抬升量不足,故在此情况及曲线半径更小或超高更大的可以选用折型定位器,可保证定位器坡度及动态抬升量满足需求:一般型号的折型定位器在此安装状态下,如在上述线路条件下,则定位器坡度为10°~12°,大于计算得出的受力平衡下的坡度7°,当θ被人为变大后,由公式(3)可得,定位器的垂直方向分力Fy变大,则抵消了该定位点的上拔力。
根据现场实际,在曲线半径2 000 m,外轨超高135 mm处设有五跨绝缘关节,在关节中心柱内,有绝缘距离要求的支柱外侧工作只需采用特型定位器,大超高位置调整工作困难,为避免反复调整且接触悬挂参数无法到位,在定位器安装角度和选用长度时就需要根据上述计算公式及计算表格对照,尽量选择大半径的短弯刀特型定位器,人为改变其定位器坡度,如还是无法抵消定位点垂直方向上拔力,导致导高非自然抬升,则可以选用特型定位支座,加大坡度调整量,克服小半径大超高区段非自然抬升。
(2)调整线索张力
由于该段曲线半径为1 600 m,线路条件速度值无法达到250 km/h的设计速度,建设方将该段速度限制为160 km/h,经设计部门核算同意施工方提出的“调整线索张力”的方案。原设计张力组合为20 kN+25 kN[14],现将其改为 15 kN+15 kN的组合,根据上述公式(2)、(3)所示,张力由25 kN降至15 kN,其定位点水平力Fx、Fy按比例下降1.67左右,经现场实测,更改张力后,接触线整体导高相较于25 kN降低了80~100 mm,降低了导高并达到验收标准值。
5 结束语
银吴客运专线自主研发的两种新型承力索倒装装置和关于有砟常动轨铁路接触网吊弦数据处理及计算软件,运用在连续复合曲线下有砟高铁接触网施工中,施工质量得到了极大的提高,并且解决了轨道未成型给接触网调整带来的限制,提高了工效确保了施工工期,取得了较好的经济效益和社会效益,具有良好的节能环保效益[15],值得进一步推广应用。
总结的连续复合曲线承力索倒装施工精度高效控制技术、复合曲线段吊弦计算参数相对值测量技术、复合曲线段有砟高铁接触网吊弦数据处理技术、小半径大超高区段接触网定位点非自然抬高问题研究及处理技术,可广泛应用于国内外连续复合曲线段接触网的施工,并为目前国内大力推动的350 km/h高速有砟铁路提供了有力的技术支持。同时为今后同类型工程建设提供可供借鉴的技术指导和施工经验。
