基于图像点云的多维度隧道初期支护大变形监测研究和应用
2021-07-26阳军生祝志恒唐志扬傅金阳
张 宇,阳军生,祝志恒,*,唐志扬,陈 维,傅金阳
(1.广州地铁设计研究院股份有限公司,广东 广州 510000;2.中南大学土木工程学院,湖南 长沙 410075;3.云南丽香高速公路投资开发有限公司,云南 昆明 650217)
0 引言
我国隧道工程在建设规模和建设数量上均达到了世界领先的地位。在隧道建设中,变形监测至关重要,监测信息的准确和完备直接影响施工决策。
目前,国内外多采用收敛计[1]、全站仪[2]、光纤传感器[3]等传统方法测量和计算隧道的收敛和沉降,方法可行,技术可靠。然而,传统监测方法多为单点测量,虽测量精度高,但变形监测点过于稀疏,无法获取隧道全方位的变形信息,难以发现无监测点区域的变形且变形整体可视效果差。监测点破坏会严重影响监测数据的连续性,数据一旦不完整或失真会使工程技术人员不能完全了解隧道围岩整体变形特征,进而错失隧道支护和治理的最佳时机,影响施工进度,增加施工成本,降低施工安全性。因此,亟需一种能够全方位掌握隧道初期支护大变形的监测技术。
随着建设水平的提升,数字化、信息化建设理念在隧道工程中得到不断应用和推行,三维激光扫描技术、计算机三维视觉技术等在隧道工程监测中的研究和应用已成为焦点[4-6]。谢雄耀等[7]对隧道三维扫描点云建立椭圆柱面三维模型,并对隧道整体变形进行测量分析,实现了隧道变形的可视化。李涛等[8]提出了一种基于全息变形监测的隧道支护评估体系,克服了传统有限断面有限点监测的局限性,可真实再现隧道施工现场。张宇等[9]提出了基于图像点云空间测距算法的隧道初期支护整体变形监测技术,通过对点云进行直接比较,可直观反映隧道初期支护的整体变形情况,实现计算效率和计算精度的平衡。以上研究均以获取的三维点云数据为基础,从隧道整体变形方面进行了系统研究。然而,结合三维点云数据信息的全面性、可视化性等特点,有必要更加细化,从多角度对隧道变形进行分析,获取不同方向的变形特征,以更好地指导施工。
鉴于此,本文提出一种基于图像点云的能够多维度掌握隧道初期支护大变形的监测技术;并在此基础上,以云南香丽高速海巴洛隧道为依托工程,进行现场应用分析研究。
1 图像点云数据的获取及预处理
本文基于图像点云数据,从三维、二维及特征点等不同维度对隧道初期支护进行变形分析研究(见图1)。主要采用数码单反相机获取隧道初期支护图像设备,通过图像三维重建、图像点云预处理等关键步骤获取点云数据。其中,图像采集流程主要包括选取变形监测位置、布置测量控制点标定板、采用全站仪辅助获取控制点坐标和采集变形监测区域第1期图像;隧道初期支护图像三维重建主要包括基于SFM算法的稀疏点云重建、基于SGM算法的密集点云重建、图像点云三维坐标系转换、基于三角剖分算法的三维曲面重建等步骤;图像点云预处理包括去除噪声、施工机械、堆积物、电线及超前支护等非隧道结构的三维冗余点云信息[9-10]。

图1 图像处理及变形监测分析流程Fig.1 Image processing and deformation monitoring and analysis process
2 隧道初期支护三维整体变形分析方法
隧道三维整体变形分析可基于多期图像点云的三维重建实体网格模型对比研究(见图2),即计算2期三维重建实体网格模型的距离,通过计算比较实体网格模型的顶点到参考实体网格模型的距离实现2模型的比较分析。

(a)第1期实体网格模型
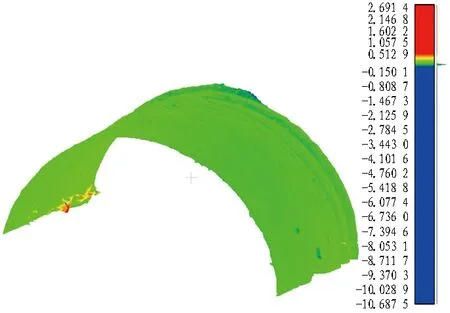
通过在参考实体网格模型中搜索最近的三角形,根据通过点到平面距离公式,计算比较模型各顶点到参考模型的距离。计算结果有正负之分,可通过查看三角形的法线来确定网格的内部和外部,根据三角形的法向确定计算结果的符号。将计算的距离分量字段转换成颜色梯度,获得基于2期图像三维重建实体网格模型比较分析结果见图3。对2期图像三维重建实体网格模型变形值进行数理统计分析,可获得隧道初期支护变形直方图和高斯分布,进而得到隧道初期支护整体变形最值、均值、标准差和均方根估计等数理统计数据,如图4所示。
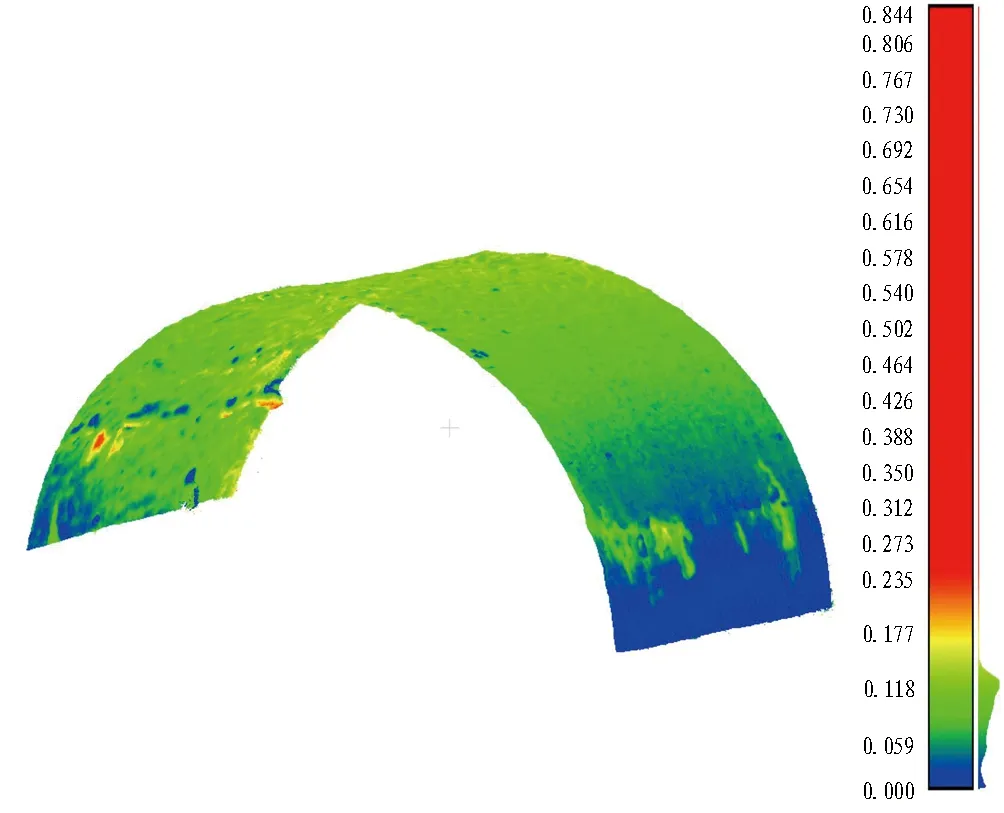
图3 基于2期图像三维重建实体网格模型变形比较分析结果(单位:m)Fig.3 Comparison and analysis results of solid mesh model deformation based on two phases of 3D reconstruction images (unit:m)
3 隧道初期支护二维变形分析方法
获取隧道施工初期支护三维整体变形数据的同时,有必要结合规范对隧道初期支护模型进行二维变形分析,获取隧道施工指定里程位置各方向变形特征。
为研究隧道初期支护二维变形,首先要确定截面位置,进而获取在该截面上的二维变形数据。确定截面位置有以下几种方法:
1)三点法。选取隧道初期支护三维网格模型上3个网格顶点,根据3点确定一平面的方法来确定截面位置。
2)直线法。指定一条直线,根据过该直线的平面来确定截面位置。
3)系统平面法。系统平面有XY平面、XZ平面和YZ平面。若选取XY系统平面,通过对X方向旋转指定角度x°∈(-180°,+180°),Y方向旋转指定角度y°∈(-180°,+180°),确定截面方向,并需指定定位里程截面位置Z,基于3个变量(X、Y、Z)可精确获取截面方位。

(a)直方图
本文采用系统平面法截取指定方位的初期支护三维网格实体模型,获得指定方位二维截面信息。对比同一截面不同期隧道初期支护图像点云信息,实现隧道初期支护二维变形分析。
3.1 沿隧道轴线垂直方向变形分析
沿隧道中心轴线垂直方向变形分析,即对隧道指定里程断面进行变形分析。隧道现场监控量测必测项目主要有洞内外观察、周边位移、拱顶沉降以及地表沉降,规定隧道周边位移、拱顶沉降和地表沉降等必测项目宜布置在同一断面,其量测面间距及测点疏密应根据隧道埋深、围岩级别、断面大小、开挖方法、支护形式等确定[11-12]。
对于周边位移监测,传统方法是每5~50 m为1个断面,每断面没2~3个测点;对于拱顶沉降监测,传统方法是每5~50 m为1个断面。传统全站仪等方法虽可以满足对隧道周边位移监测和拱顶沉降监测要求,但不能全面反映监测断面周边位移和拱顶沉降的整体特征。而沿隧道轴线垂直方向截取图像点云三维重建网格模型,可获得指定里程断面的全断面变形数据,实现指定里程全断面变形分析,是对传统监测方法的良好补充。每1 m截取1个断面,监测密度明显优于传统方法,且监测结果更加全面详实。截面1和截面2隧道轴线垂直方向变形分析分别见图5和图6。
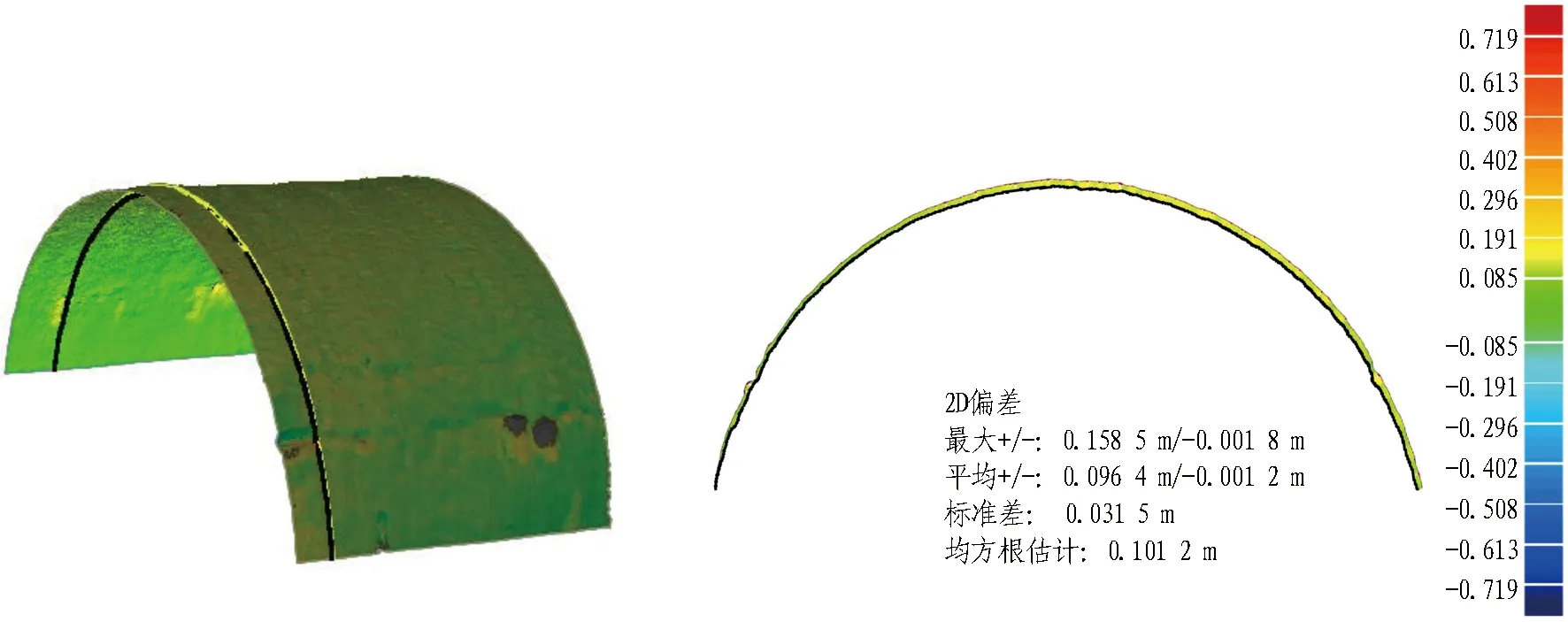
图5 隧道轴线垂直方向变形分析:截面1(单位:m)Fig.5 Analysis of vertical deformation of tunnel axis:section 1 (unit:m)
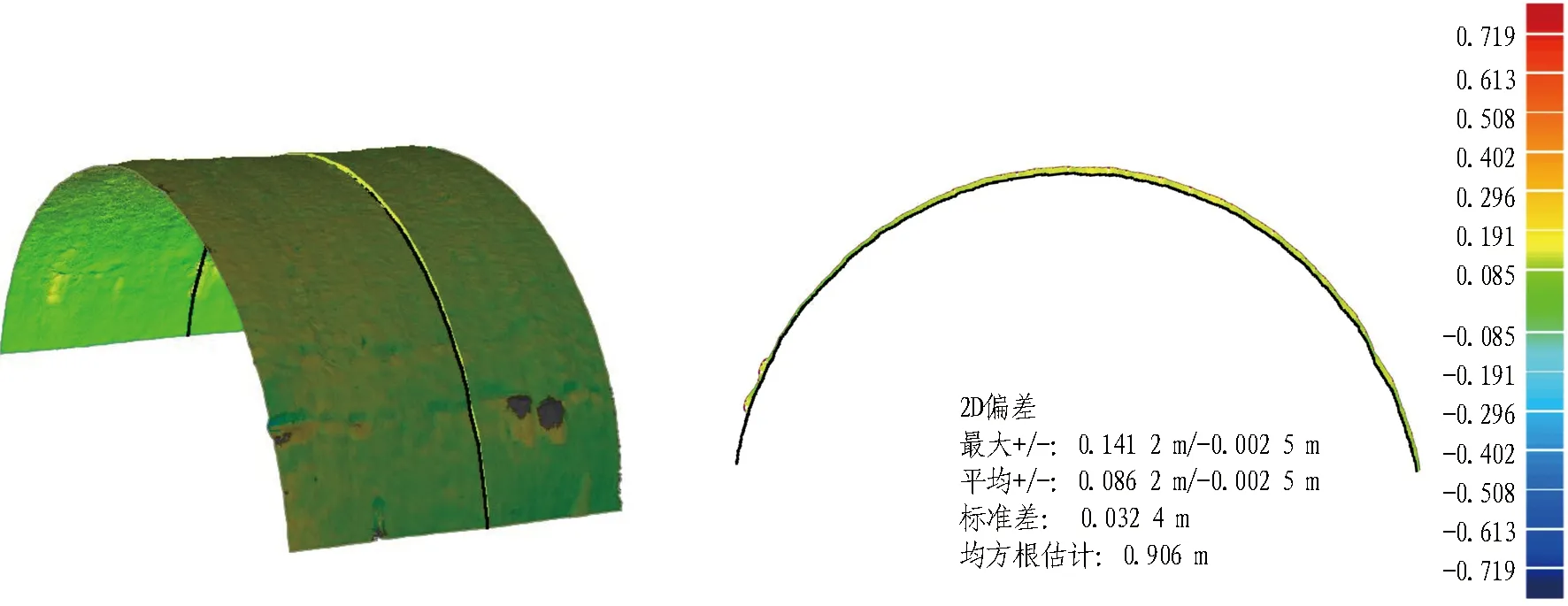
图6 隧道轴线垂直方向变形分析:截面2(单位:m)Fig.6 Analysis of vertical deformation of tunnel axis:section 2 (unit:m)
3.2 沿隧道轴线方向变形分析
沿隧道轴线方向变形分析即对指定里程隧道拱顶沉降进行整体分析,可改善传统监测方法中每5~50 m 1个断面离散监测不全面带来的不足。沿隧道轴线方向截取图像点云三维重建网格模型,获得隧道拱顶变形值,可实现对指定里程段拱顶沉降连续监测和整体分析。
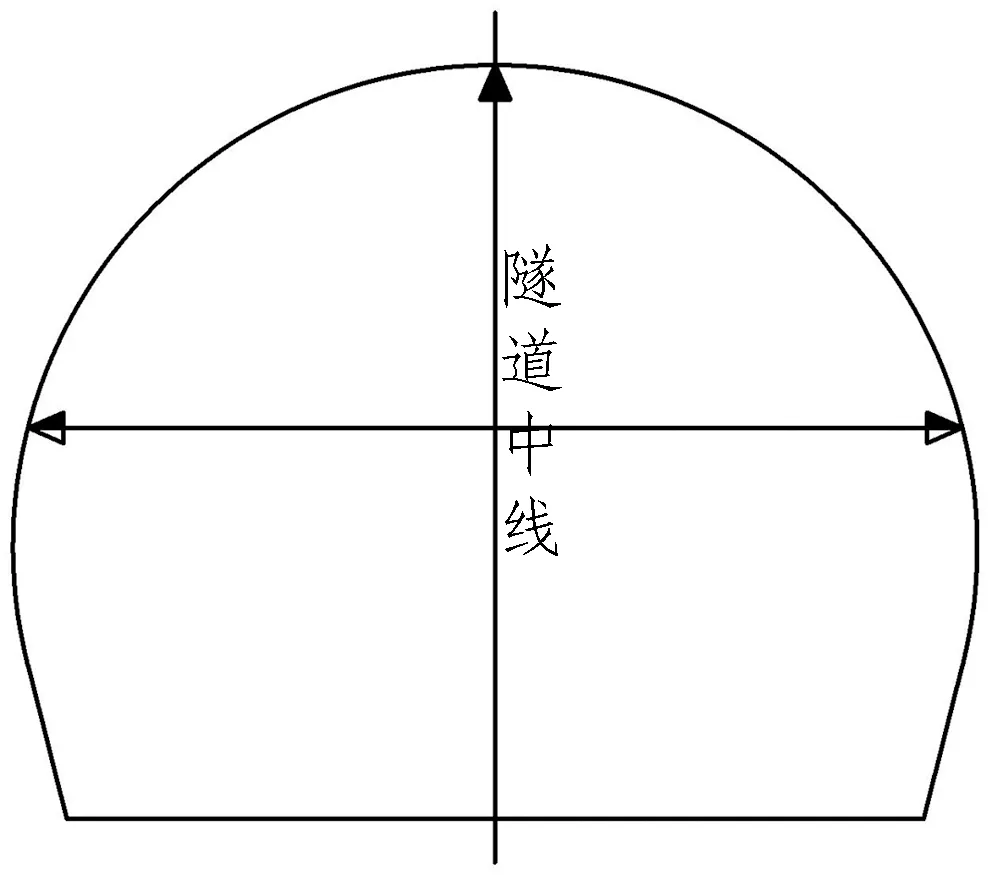
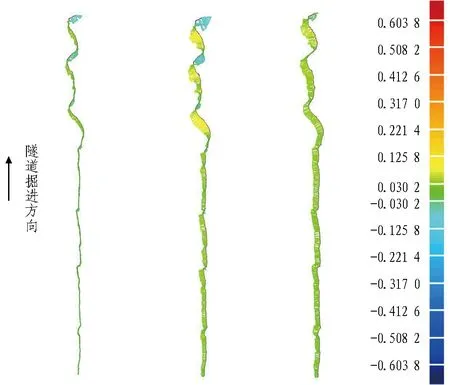
拱顶沉降量测的测点原则上宜布设在拱顶中心线上,沿着隧道轴线方向截取拱顶1条测线(见图7),当洞跨较大时,亦可在拱顶设置3条测线(见图8)。

图7 沿隧道轴线方向变形分析结果(1条测线)(单位:m)Fig.7 Deformation analysis results along tunnel axis (one measurement line)(unit:m)

图8 沿隧道轴线方向变形分析结果(3条测线)(单位:m)Fig.8 Deformation analysis results along tunnel axis (three measurement lines)(unit:m)
3.3 沿隧道水平方向变形分析
沿隧道水平方向变形分析即对隧道指定里程段隧道周边位移(收敛量测)进行整体分析。不同的施工方法测线数量及布置方式也各不相同(见图9)。
(a)台阶法
可根据隧道不同的施工方法,沿水平方向截取图像点云三维重建网格模型,获得隧道周边收敛数值,实现沿隧道水平方向变形分析(见图10)。
4 隧道特征点变形分析方法
基于图像三维重建获得的多期隧道初期支护三维点云无法获得共有点对,因此,可将在隧道表面布置的标定板中心作为变形监测特征点。通过获取多期标定板中心坐标,并对坐标数据进行比较,实现指定位置特征点变形分析;亦可在隧道初期支护三维图像点云模型表面设置偏差半径,通过统计和拟合出指定半径区域内的显著特征点,对特征点数据进行比较,实现特征点变形分析。基于图像点云隧道特征点变形分析方法与传统全站仪监测方法单点测量类似,其在单点精度上不及传统方法,因此不做过多研究。

图10 沿隧道水平方向变形分析结果(单位:m)Fig.10 Analysis results of deformation along tunnel horizontal direction (unit:m)
5 工程应用
5.1 工程概况
云南省香格里拉至丽江高速公路海巴洛隧道是一座分离式隧道,右幅隧道起止点桩号为YK65+495~YK67+757,分界段全长2 262 m,隧道最大埋深约为461 m;左幅隧道起止点桩号为K65+505.04~K67+794,分界段全长2 288.96 m,隧道最大埋深471 m。左右幅隧道中线距离34~42 m,累计总长4 550.96 m。
5.2 隧道变形情况
海巴洛隧道施工围岩等级主要为Ⅴ级,围岩主要为薄层状—碎块状结构的强风化、中风化灰黑色炭质板岩,层厚在0.06~0.2 m,地下水较发育。隧道施工中过程中,部分断面会发生掌子面垮塌、初期支护大变形(见图11)。

(a)拱脚位置变形
常出现初期支护开裂、剥落、钢拱架扭曲变形等问题,导致初期支护换拱、增加护拱频繁,严重影响施工安全和施工进度。
5.3 隧道初期支护三维整体变形监测分析
分别于2018年8月17日(第1期)、8月27日(第2期)、9月1日(第3期)、9月7日(第4期)对海巴洛隧道进口右线YK66+224~+232段采集初期支护图像,并对其进行三维重建(见图12)。
以第1期三维重建实体网格模型为参考模型,分别以第2期、第3期、第4期三维重建实体网格模型为比较模型,计算比较模型与参考模型之间距离偏差,获得该段初期支护三维整体变形分析结果(见图13和表1)。

(a)第1期
(a)第2期

表1 海巴洛隧道初期支护三维整体变形统计分析结果Table 1 Statistical analysis results of 3D overall deformation of primary support of Haibaluo tunnel m
根据图13和表1数据,根据海巴洛隧道进口右线YK66+224~+232段初期支护三维整体变形分析及统计分析结果,对比第1期三维重建结果,截至2018年8月27日,10 d内整体变形均值为23.5 mm;截至2018年9月1日,14 d内整体变形均值为28 mm;截至2018年9月7日,20 d内整体变形均值为30.2 mm,该段隧道处于持续变形状态。
5.4 海巴洛隧道二维变形分析
分别沿隧道轴线方向、水平方向和轴线垂直方向截取图像点云三维实体网格对比分析模型(见图14),获得隧道拱顶变形值(见图15)、初期支护周边收敛变形值(见图16)和全断面变形值(见图17)。

(a)拱顶沉降
根据图15—17数据,海巴洛隧道进口右线YK66+224~+232段隧道初期支护处于持续拱顶沉降、周边收敛状态,拱顶沉降值沿着隧道掘进方向逐渐增大,靠近掌子面拱顶沉降较大。截面1、截面2、截面3位置均处于持续变形状态,截面1、截面2左拱腰相对变形较大,截面3右拱腰相对变形较大。施工过程中已根据监测变形数值和变形特征及时采取变形控制措施。
(a)第2期 (b)第3期 (c)第4期图15 海巴洛隧道初期支护拱顶沉降变形值(单位:m)Fig.15 Settlement of primary support crown of Haibaluo tunnel (unit:m)

图16 海巴洛隧道初期支护周边收敛变形值(单位:m)Fig.16 Peripheral convergence of primary support of Haibaluo tunnel (unit:m)

图17 海巴洛隧道初期支护监测断面全断面变形值(单位:m)Fig.17 Full-face deformation of monitoring section of primary support of Haibaluo tunnel (unit:m)
6 结论与建议
6.1 结论
1)隧道初期支护三维整体变形分析方法高密度图像点云数据以及三维实体网格模型可精细、可视化反映隧道表面的空间形态,并记录不同时期隧道初期支护三维空间位置,真实准确地反映隧道的三维整体变形。
2)隧道初期支护二维变形分析方法,可获取监测里程段内的拱顶沉降、周边收敛和全断面的变形信息,改善了传统监测方法中监测点数量少、监测数据不连续和不能直观反映隧道变形特征的不足。
3)以云南香丽高速海巴洛隧道进口右线YK66+224~+232段初期支护为应用对象,获取4期三维图像点云数据,从三维整体和二维局部多角度对该段初期支护进行变形分析。应用结果表明,所提方法在隧道变形监测方面具有独特的优势,隧道变形监测结果更为全面、直观,可为隧道变形规律及变形控制方法的研究提供详尽的数据支持。
6.2 建议
粉尘、噪声、管线和施工机械等干扰会影响所提方法对隧道变形监测的精度,针对某一特定点位的变形,建议结合全站仪等传统测量设备进行监测。
