多目标约束的电动汽车实时调度策略
2021-07-26牛玉刚陈凯炎
常 硕, 牛玉刚, 陈凯炎
(华东理工大学能源化工过程智能制造教育部重点实验室,上海 200237)
电动汽车(Electric Vehicle, EV)具有零污染、低耗能、扩大可再生能源利用的特性[1-2],正在逐步取代传统的燃油汽车。EV 在节能减排方面的优势明显,但其并网数量和电池容量的不断增加给电力系统带来了巨大的运行负担。据调查,EV 的无序充放电行为和电网负荷曲线峰值吻合时,会加重电网超载问题[3]。众多研究表明大量EV 的无序并网会对电网带来可靠性问题和安全隐患,如峰值负荷增加、网络损耗增加、输电线超载、变压器老化加速等[4]。
具有车网互动(Vehicle-to-Grid, V2G)能力的EV 在荷电状态(State of Charge, SOC)高时可以把电能回馈到电网。V2G 技术和车辆自主通信技术的成熟[5],使得EV 能够参与优化调度,降低负荷压力。EV 充放电具有相似性和聚集性,即同一街道或小区的EV 具有相似的充电行为,增加了EV 的可调度性。
目前,研究EV 优化调度问题的方法分为日前全局优化和实时局部优化。文献[6]建立了EV 用户充放电不确定的响应模型,以净收益最大进行日前调度,提高EV 参与辅助服务的效果。文献[7]建立了EV 日内优先调度模型,使电网负荷峰谷差最小,验证了日内优化的合理性。然而,V2G 调度问题是一个大规模、非梯度、多目标的优化问题,很难找到全局最优解。全局优化调度需要假设EV 的到达时间和已知电网的基础负荷,这是不切实际的,与EV 的动态特性相矛盾。
文献[8] 提出了一种V2G 实时调度方法,以充电成本和网损成本为目标函数进行优化,并证明了实时调度方法的有效性。文献[9]考虑需求差异制定计划功率,使实际功率满足用户的差异需求,满足EV 的动态特性。实时局部调度把时间和EV 群进行分割,分布式调度能很好地适应EV 动态到达情况。
V2G 技术是实现EV 在电网中灵活、经济运行的第一步,但采用V2G 技术会造成严重的电池老化问题。电池成本约占EV 总成本的40%,因此合理地控制电池老化是关键。文献[10]提出了多时间尺度的调度策略,电池老化成本为上层优化,充放电成本为下层优化,完成日前阶段,通过无序和有序充电对比,验证了电动公交车参与V2G 的优越性。
EV 模型和动态到达特性决定了EV 调度参与模式和对电网的影响。文献[11]研究了电池的老化机理和寿命预测,建立了电池老化模型并进行了量化分析。文献[12]模拟了充电速度和电池老化的关系,研究有序充电来改善电池老化,结果显示合理的EV 调度会延缓电池老化。文献[13]在分时电价基础上,考虑负荷均方差、峰谷差、充电成本和电池老化建立EV 调度,证明了策略的有效性。然而,已有文献在研究V2G 模式对电池寿命带来的影响时,很少通过EV 的合理调度降低电池老化。
基于上述分析,本文提出了一种滑窗变速优化充电方案(Sliding Window Variable Speed Optimization Charging Scheme,SWVSO)。采用充电功率波动法量化电池老化成本,以电池老化成本、充电成本和网损成本最小为目标函数,建立多目标优化问题;利用凸优化算法求解多目标优化问题,得到EV 实时调度策略。最终在改进的IEEE 33 节点配电网上验证了SWVSO 在V2G 实时调度过程中,降低了电池老化成本,减少了充电成本和网损成本。
1 V2G 调度模型
V2G 调度系统分为5 个部分:配电网、信息采集系统、V2G 调度中心、智能充电模块和电动汽车。信息采集系统基于信息共享和互联互通技术采集电网的基础负荷和EV 充放电需求,并把采集到的实时信息(刚刚接收的15 min 的信息)传输给V2G 调度中心。随着智能电网的发展,电动汽车、电网以及调度中心的信息共享技术已经非常成熟[14]。V2G 调度中心根据接收到的实时信息和历史信息,给出调度区间内每辆EV 的充放电策略。以电池老化成本、网损成本和充电成本最小为目标制定调度策略,通过智能充电模块对EV 进行充电。智能充电模块根据V2G 调度策略,通过内部电子设备实时控制EV 的充放电功率。V2G 调度系统的结构如图1 所示。
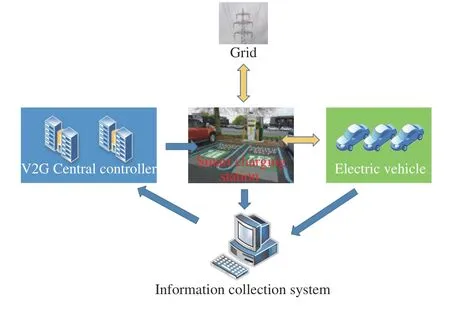
图1 V2G 调度系统结构图Fig. 1 Structure of V2G scheduling system
1.1 目标函数
1.1.1 电池老化成本 电池老化是一个关键参数,电池的充放电会造成容量的减小,使提供的能量减少。
电池老化成本分为充放电功率大小和充放电功率波动引起的成本。充放电功率大小导致的电池老化成本为

其中:C1,i为第i辆EV 24 h 内由充放电功率导致的电池老化成本; α 为模型系数,因为充电功率导致的电池老化较小,设置为很小的正数;Δt是时段大小;xi,t为第i辆EV 在时段t的充电功率(xi,t> 0, EV 充电;xi,t<0, EV 放电)。
相邻时段充放电功率波动引起的电池老化成本为

其中:C2,i为第i辆EV 24 h 内因充放电功率波动导致的电池老化成本; β 为模型参数;xi,t+1为第i辆EV 在时段t+1 的充放电功率。相邻时段充放电功率波动越大引起的电池老化越大,且EV 充放电状态的改变(充电到放电或放电到充电)会造成更大的电池老化。因此24 h 的调度过程中,充放电状态切换越频繁,电池老化成本越大。
综上,24 h 的调度区间内电池的老化成本为

1.1.2 充电成本 参与V2G 计划的EV 的充电成本取决于充电消耗和放电收益。值得注意的是,充电成本有可能为负值,即EV 放电收益高于充电消耗。降低充电成本是EV 车主参与V2G 计划最重要的激励因素,但高频率放电会对电池造成不可逆的损耗,限制了EV 车主向电网馈电的积极性。假设同一时段内充放电行为不变,入网EV 引起的负荷LE
tV为


为了量化EV 的充电成本,假设同一时段内电价不变(电价仅随时间变化,空间上不变)。电价设计为电网瞬时负载的线性函数:

其中:p(zt) 为时段t的电价;k0和k1是正常数。在实时电价下,EV 的充电成本为

24 h 调度区间内EV 的充电成本为
1.1.3 网损成本 减少网损是电网优化问题之一。电网的有功损耗为各输电线损耗之和,传统的潮流计算求解网络损耗过于复杂,因此本文采用离线网损灵敏度(Power Loss Sensitivity, PLS)计算网损。
对于含有M条支路的配电网,传统的潮流计算方法求解网损量公式如下:

其中:GLm,t为支路m在时段t上的网损;rm为支路m上的电阻;Im,t为时段t支路m上的电流;GL为总网损量。
网损灵敏度是节点注入单位负荷后产生的网损大小。计算节点网损灵敏度时,首先在节点注入基础负荷计算网损,再依次计算EV 并网后的网损,网损改变量和节点有功功率的比值即为网损灵敏度:

其中: P LSb,t为节点b在时段t上的网损灵敏度;P为节点有功功率;n为节点数; ΔP为节点注入的有功功率。
用网损灵敏度计算网损的公式为
因此,一个调度循环内的网损成本为

其中: ρ 为折算系数。
在每日调度开始前,离线计算所有时段的网损灵敏度,然后根据网损灵敏度结合EV 的注入负荷,即可得到网损成本,避免重复潮流计算。
1.1.4 总成本 一个调度周期内EV 完成充电任务的总成本为

优化目标函数可以表示为

从综合指标考虑,只考虑单目标时无法真实反映EV 的实际使用成本。3 种成本代表了电网和车主的利益,在设置量化系数时使3 种成本重要程度相同,更接近EV 的实际使用成本。比如,仅考虑充电成本时,充电成本在时段20 附近最小,同时充电时间过长会增加电池老化成本,而且充电成本约束下的充放电功率会产生短期峰值,无法保证所需电力。综合考虑,给3 个子目标设置相同的权重。
1.2 约束条件
1.2.1 电池荷电状态约束 合理的荷电状态上下限能够延缓电池老化:
1.2.3 电池电量约束

其中:tarr为EV 入网时间;tdep为EV 离网时间;Eini为初始电池电量;Eset为目标电池电量;Ebatt,i为EVi的电池容量;td为可调度时段。式(20)保证了EV 在离网时电池电量能满足要求;式(21)保证了调度区间内电量始终在允许范围,既不过度放电也不过度充电。
1.3 问题数学模型
V2G 调度的数学模型为

约束条件:

2 V2G 调度策略求解
调度周期为24 h,划分成T=96 个长度为 τ =15 min的时段。SWVSO 把EV 分为96 组,每组包含对应时段接入的EV,充电区间包含当前时段且充电任务未完成的EV。如图2 所示,第i辆EV 的调度区间为

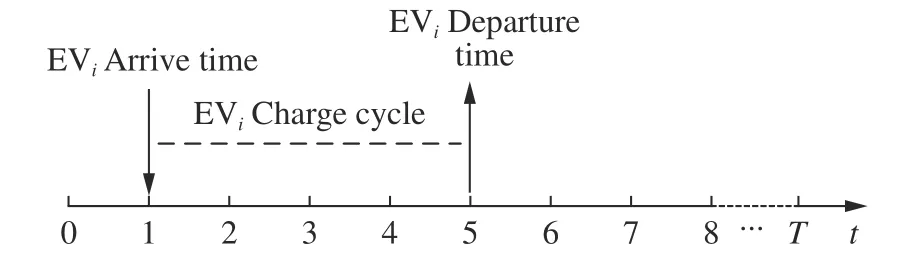
图2 EVi 的充电调度区间Fig. 2 Charging scheduling interval of EVi
考虑电池老化,车主并非都愿意参与V2G。设置V2G 参与率为 γ ,EV 入网数为N,则
图3 示出了时段1 的调度区间范围,时段1 的EV 集包括EV1、EV2和EV3,其中EV1和EV2是充电未完成,EV3是在时段1 开始调度。取可调度区间的并集,得到时段1 的调度区间SW1。类似的,确定每个时段的调度区间,进而求解调度区间内的调度策略。
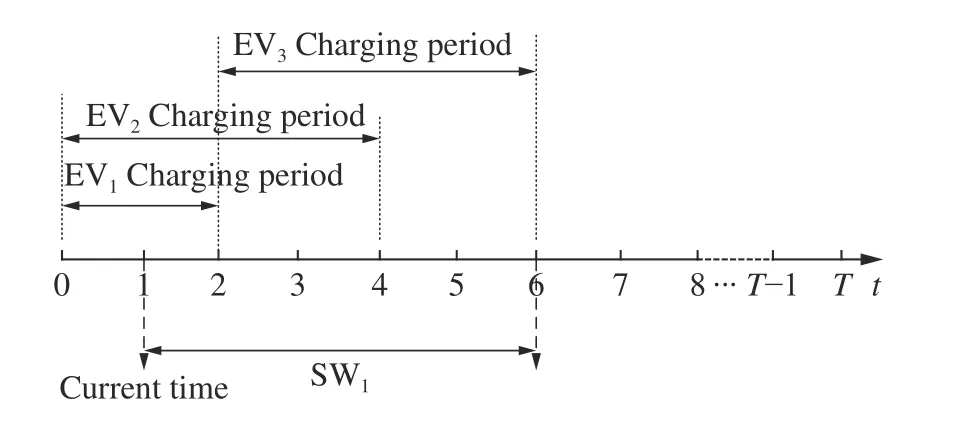
图3 时段1 的调度区间范围Fig. 3 Scheduling range of slot 1
V2G 调度策略求解模型如图4 所示。在V2G调度开始之前,将通过信息采集系统采集到的EV 和电网的实时数据进行数据更新。V2G 调度中心根据输入的实时数据(EV 状态、V2G 用户需求、负荷要求、V2G 可调度量等),确定当前时段t的EV 集EV(t),求解当前充放电矩阵E(t,n)。取当前时段的充放电矩阵为最优调度策略,智能充电站按最优调度策略控制EV 充放电。在T个区间上依次求当前充放电矩阵E(t,n),得到最优充放电矩阵E(T,N)。
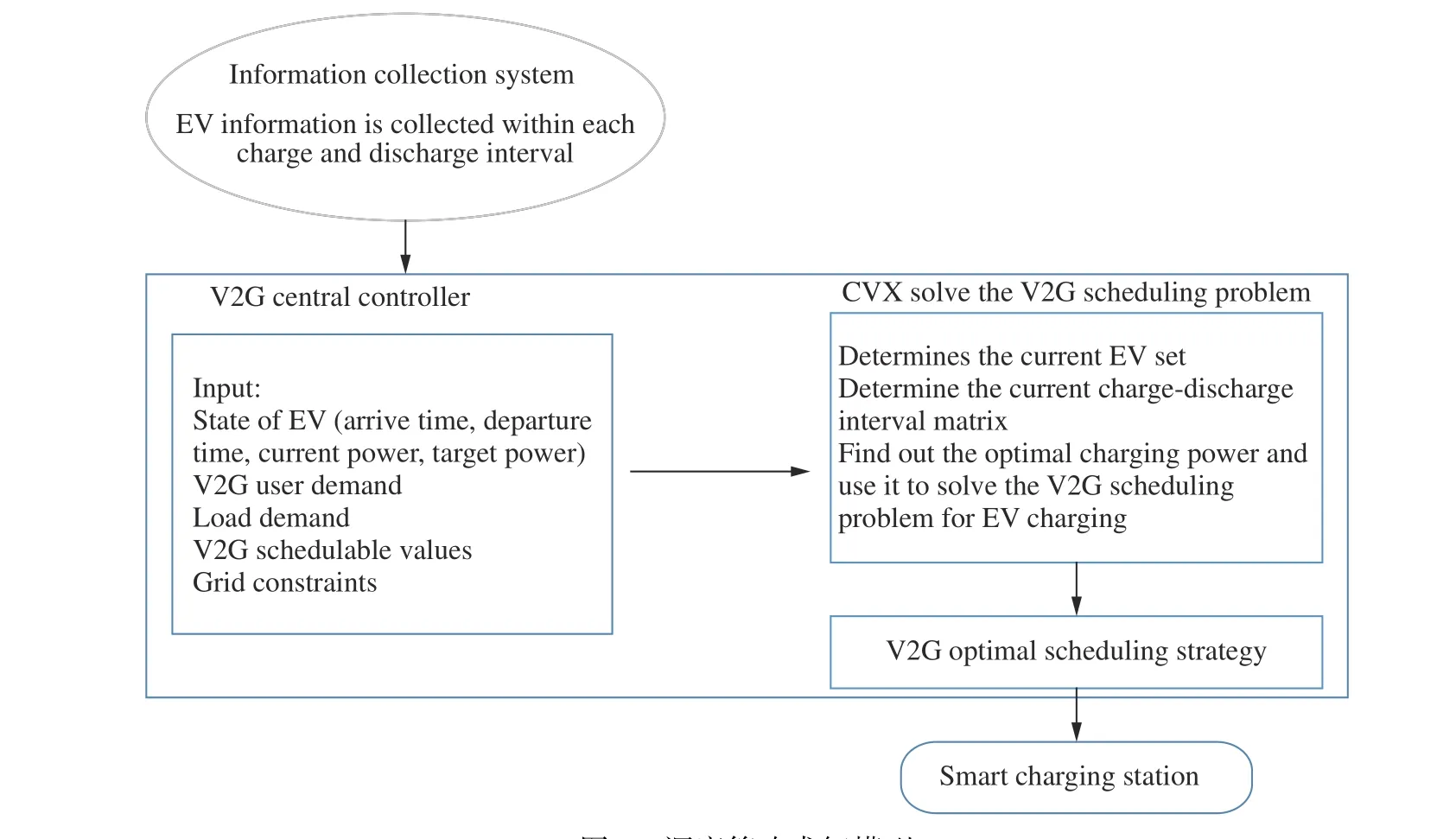
图4 调度策略求解模型Fig. 4 Scheduling strategy solution model
凸优化法求解V2G 调度策略的流程图如图5所示。

图5 V2G 调度策略求解流程图Fig. 5 Flow chart of V2G scheduling strategy solution
1.3 节中描述的问题的目标函数为二次可微凸函数,并且所有约束条件均是线性,可以采用内点法得到解析解。求解过程中使用CVX 工具包,首先初始化目标变量,通过式(22)给出目标函数并计算目标函数原始值,更新充电功率矩阵,组织验证结果(EV 电量是否满足式(26),验证充电功率是否满足式(24)和(25),验证电池能量是否满足式(27)),比较目标函数值,迭代直到目标函数值取得满足约束时的最小值。
3 仿真实验
在IEEE 33 系统上测试了SWVSO,并通过与平均分配(Equal Distribution Scheme,ED)、自然充电(Naive Charging Scheme,NC)和全局优化(Global Optimization Scheme,GOS)方法比较,验证了SWVSO在降低EV 充电成本、削峰填谷和降低网损方面具有良好的效果。
3.1 测试环境
IEEE 33 测试系统是一个12.66 kV 三相平衡径向配电系统,如图6 所示。

图6 IEEE 33 节点配电网测试系统Fig. 6 IEEE 33 bus distribution test system
电网的实际日负荷曲线如图7 所示。时段73 的基础负荷峰值为3 062.6 kW,负荷峰谷差为1 130.5 kW。实时电价如图8 所示。

图7 电网的实际日负荷曲线Fig. 7 Actual daily load curve of the grid

图8 实时电价曲线Fig. 8 Real-time price curve
实际模型中,建立一个EV 数据文件,包括入网时间、离网时间、初始电量、目标电量、是否支持V2G 和接入电网节点。在IEEE 33 测试系统中接入EV 时,考虑节点类型的不同,在节点7 到节点33 随机接入EV。考虑EV 实际使用状况和随机性,不同时间接入电网EV 的数量如图9 所示。
入网时间服从均值为 μ1=63.6 、方差为12 的正态分布。如图9 所示,EV 在时段36 附近开始进入电网,符合实际电动汽车行驶特性。
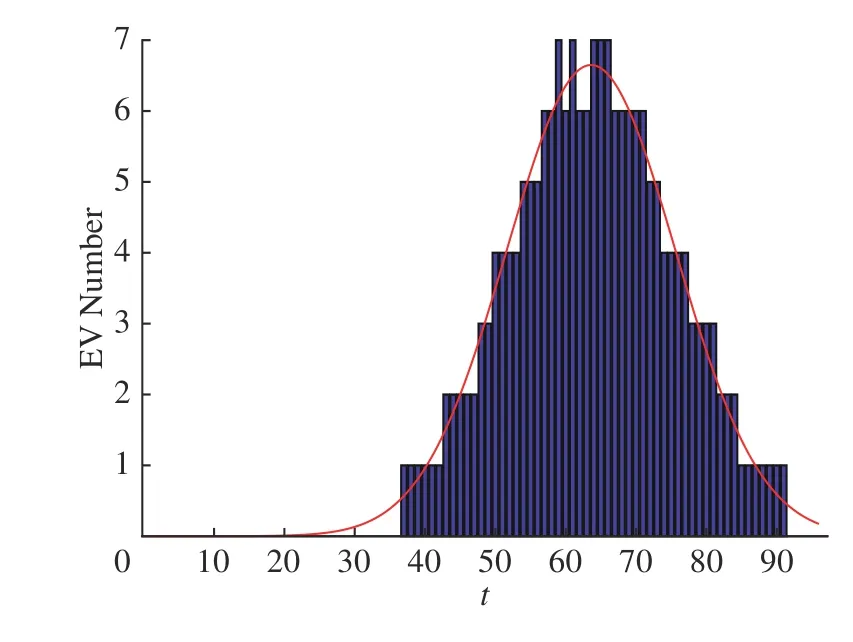
图9 各时段入网EV 数量Fig. 9 EV numbers in each slot
仿真相关参数设置如表1 所示,其中Ecap为电池容量。
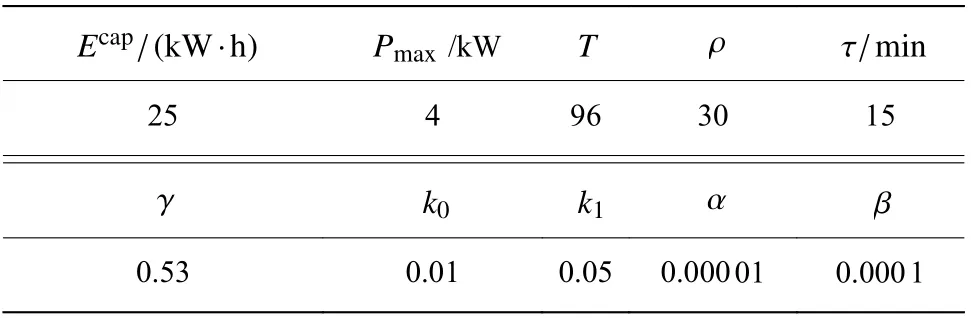
表1 相关仿真参数设置Table 1 Simulation parameters setting
根据文献[15],当V2G 比例较低时,对放电的需求度变高,EV 放电效果明显,单辆EV 充电成本大幅降低;相反,当V2G 比例较高时,尽管放电能力增强,放电需求没有改变,但单车充电成本无法进一步降低。
时段4 各节点网损灵敏度如图10 所示。可以看到在节点18 处得到最大网损灵敏度为0.778。值得注意的是,节点1 的网损灵敏度出现负值,是因为节点1 为平衡点,不接负载。节点19 和节点2 的网损灵敏度接近0,即接入EV 后几乎不产生网损。网损灵敏度反映了节点对EV 的接纳能力,网损灵敏度大,节点接纳能力差;网损灵敏度小,节点接纳能力强。利用网损灵敏度求网损量,降低了反复潮流计算的复杂性[16]。

图10 时段4 时各电网节点网损灵敏度Fig. 10 PLS of each grid node at slot 4
3.2 平均分配方案
采用平均分配方案时,EV 在可调度区间内以相同的充电功率对EV 进行充电,但是不会超过最大充电功率。采用仅充电平均分配方案(Only Charge Equal Distribution Scheme,OCED)时,EV 无法把能量回馈到电网,只通过充电对电网产生影响。
自然充电方案中重要的是确定EV 执行放电的时段大小。首先初始化放电区间大小,当EV 可调度区间大于两倍放电区间时执行充电,通过最大充电功率充电,然后验证EV 最终能量得到充电策略,最后迭代确定最大放电区间。NC 方案求解流程图如图11 所示。

图11 NC 方案求解流程图Fig. 11 Flow chart of NC
OCED、NC 及基础负荷(Base load)方案的对比结果如图12 所示。OCED 和NC 方案的负荷基本一致,说明NC 方案EV 的放电过程受限,而且平均分配又使EV 的放电过程减少,这两种方法对电网平衡负载和削峰填谷的作用不大。
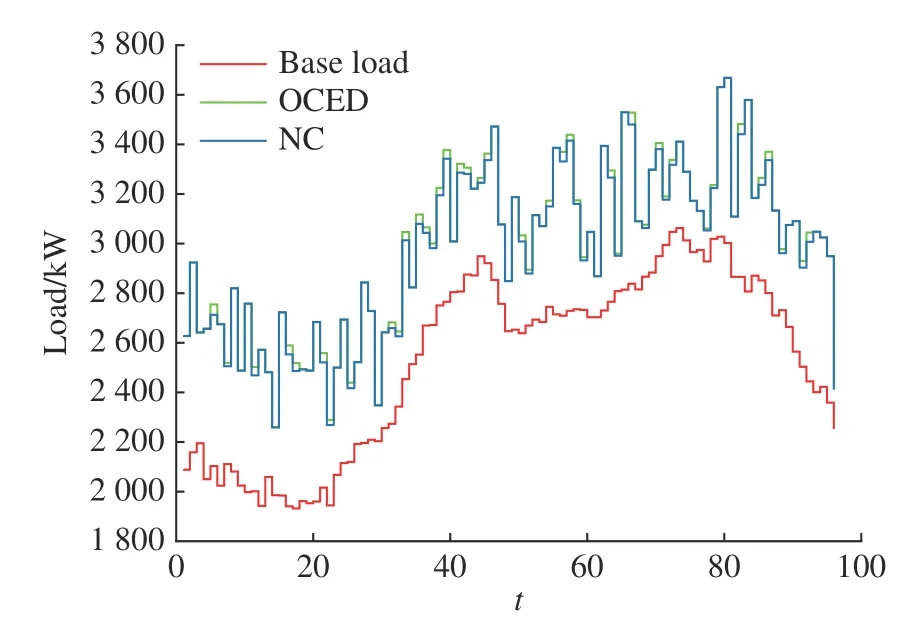
图12 OCED、NC 和基础负荷方案对比结果图Fig. 12 Comparison of OCED, NC with base load
3.3 GOS 方案
GOS 方案要已知入网、离网时间和基础负荷,不具有实际性。采用GOS 调度的电网负荷如图13所示。GOS 调度EV 的充放电量如图14 所示。
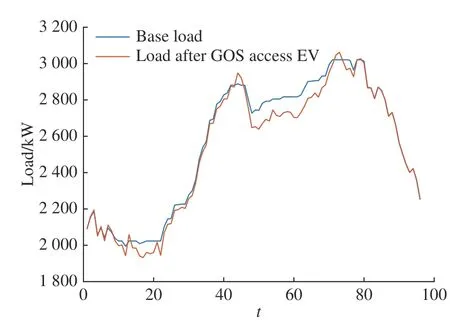
图13 GOS 调度后的负荷和基础负荷的对比图Fig. 13 Comparison of GOS load with base load

图14 GOS 调度时EV 的充放电电量Fig. 14 EV charges and discharges of GOS scheduling
由图13 和14 可知,该方法制定的EV 调度方案没有在基础负荷上产生大量的引入负荷,略微拉平了负荷曲线,对电网拉平峰谷差的效果不明显。调度后的峰谷差为1 034.7 kW,EV 充放电任务完成后总消耗电量为731.79 kW·h。
3.4 SWVSO 方案
SWVSO 把EV 分成不同组,利用凸优化法对EV 进行充电功率可变的充电策略求解。SWVSO 的优点是:把大量接入的EV 分为多个组,避免了大量的计算;不需要预知EV 的行驶行为且能快速响应EV 的动态到达。SWVSO 调度后的电网负荷如图15所示。调度过程中EV 的充放电量如图16 所示。
3.4.1 充放电行为分析 由图15 可知,该方法没有在基础负荷上产生大量负荷,同时EV 的合理调度改善了基础负荷的尖峰时刻,拉平了负荷曲线,降低了EV 的充电成本。整体上看,SWVSO 实现了大量负荷在空域和时域的转移模式,达到了削峰填谷的效果。
由图15 和图16 可知,在时段10~20,基础负荷波动大,调度后的负荷平稳。SWVSO能够平衡电网负载,转移峰值负荷。在时段20~40,接入的EV 较少,且支持V2G 和不支持V2G 的EV数量相近,充电和放电相互抵消,所以负荷变化不明显。在时段45 和时段75 附近,EV 净负荷为负,表现为放电,有效降低了电网负荷峰值。

图15 SWVSO 调度后负荷和基础负荷对比图Fig. 15 Comparison of SWVSO load with base load

图16 SWVSO 调度时EV 充放电电量Fig. 16 EV charges and discharges of SWVSO scheduling
结合图8 和图16 可知,在电价峰值时段45 和75 附近,接入电网的EV 放电;在电价谷值时段15 和50 附近,EV 充电。EV 在电价波动较大的时段交替进行充放电来获取较大的收益。
SWVSO 调度下EV 各时段的充放电行为记录如图17 所示。
从图17 可以看出,多数EV 的充放电行为符合调度规律,电价高时放电,电价低时充电。仅极少数EV 在入网时间内进行了反复多次的充放电,因此SWVSO 一定程度上降低了电池损耗的成本。图17反映的是以充电成本、网损成本和电池老化3 项成本来控制电动汽车的充放电频率,比仅考虑充电成本时的充放电切换更加频繁。当实时电价保持各时段不变时,可以通过提升网损成本或电池老化成本的占比来降低充放电频率。此外采用较为宽松的分时电价可以降低电动汽车的充放电切换频率。
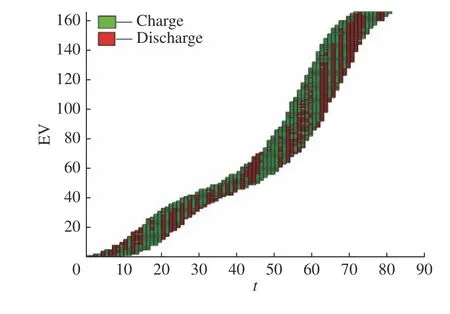
图17 EV 充放电行为记录Fig. 17 Charge and discharge behavior records of EV
3.4.2 各项成本分析 表2 给出了4 种调度方案的调度结果。由表2 可知,SWVSO 调度的EV 净充电量为763.14 kW·h,充电总成本为796.3 元,考虑老化成本,平均每辆车充电成本为4.89 元,较OCED 和NC 单辆EV 充电成本分别降低了31.49%和32.92%。因此,SWVSO 在降低EV 充电成本上有良好的效果。

表2 各种充电方法结果对比Table 2 Results comparison of various charging methods
SWVSO 调度后的峰谷差为980.24 kW,比基础负荷、NC和GOS分别降低了13.29%、30.43%和5.56%,故SWVSO 在平衡负载和削峰填谷方面有明显的优势。NC 的峰谷差增加的原因是EV 接入时间分布和基础负荷的峰谷分布趋势一致,且可调度车辆较少,调度能力有限,导致负荷峰值越高,谷值越低。
SWVSO 调度后电网损耗成本为58.14 元,与OCED、NC 相比分别降低了2.22 倍和1.55 倍,SWVSO在降低网损成本方面效果极好。
SWVSO 的老化成本较NC 升高,是因为SWVSO对EV 调度时,相邻时段的充电功率变化大而NC 基本不变。SWVSO 在保证变速充电的前提下,电池老化成本基本持平。网损成本是由于SWVSO 调度过程中EV 与电网能量交换相较于NC 更频繁,存在更多的能量交换造成的。值得注意的是,默认电网在接受EV 回馈电能时也产生能量损失且与电网供电一致,导致SWVSO 的网损较实际网损偏高。如何建立各项成本的合理关系,将成为今后研究的重点内容。
3.5 不同数量EV 对调度的影响
入网EV 的数量会影响EV 的调度[17]。在确定时段内接入的EV 越多充电负荷越多,意味着在EV 支持V2G 时,电网的可调度负荷也增加,在合理的调度策略下不一定会增加电网运行的负担。设置γ=0.5,即一半的EV 支持向电网回馈电能。
图18 示出了GOS、SWVSO 和NC 在不同数量EV 时的充电成本。其中,GOS 的充电成本最小,SWVSO次之,NC 的充电成本最高。

图18 不同数量EV 的充放电成本Fig. 18 Charge and discharge cost of different numbers of EV
NC 和SWVSO 调度不同数量EV 时的负荷如图19 所示。如图19(a)所示,EV 数量越多电网的总负荷越大,NC 调度能力有限。如图19(b)所示,在时段50~68,EV 数 量 越 多 负 荷 越 大;在 时 段68~82,EV 数量越多负荷越小。这说明EV 在该时段回馈能量到电网,EV 增多增强了电网调度能力,拉平负荷有利于电网稳定。以上实验表明,大量的EV 接入电网时,SWVSO 能保障电网的稳定运行,并降低各项成本,减少不必要的损耗。

图19 不同数量EV 的总负荷对比图Fig. 19 Comparison of total load of different numbers of EV
4 结 论
本文提出了一种基于V2G 技术的EV 滑窗优化变速充电策略,以老化成本、充电成本和网损成本最小化为目标,求解得到V2G 实时调度策略。
在IEEE 33 电网模型中,通过比较OCED、NC、GOS 和SWVSO 方案对EV 调度的效果,得到以下结论:
(1)OCED 和NC 调度时,负荷增加,充电成本较高。GOS 调度效果最好,但要预知基础负荷和EV 行驶特性,不具有实际操作性。
(2)SWVSO 调度下的多数EV 的充放电行为符合电价规律,电价高时放电,电价低时充电,很好地降低了充电成本并在合理的范围内降低损耗。
(3)SWVSO 调度且 γ 不变时,一定范围内增加EV 数量,电网的调度能力增强,能够拉平负荷曲线。
