一种新型农作物智能巡检小车的设计
2021-07-26王丹丹冯付美赵建周
王丹丹,杨 犇,冯付美,赵建周
(安阳工学院电子信息与电气工程学院,河南 安阳 455000)
0 引言
在现代化农业种植上,农作物产量及品质与种植环境条件密切相关。种植环境可准确地为科学种植提供温度、湿度、光照强度、CO2浓度等关键技术参数,这些参数的反馈对及时补充植物所需生长素供给,提高集成化种植,实现自动化管理和作物采摘提供有力的技术支持。
在农业种植上管理及技术应用方面,据参考文献查阅与统计,目前研究较多、应用最为广泛的是有文献[1]和文献[2]所提的物联网技术和无线传感器技术,但是此种方案需要对种植区域进行铺设电路、多个监控设备定点安装等,需要耗费大量的人力物力,且定期保修和网络维护起来也不太方便[3]。针对以上存在的问题及弊端,并结合传感器技术、物联网技术等,本文设计出了一辆可广泛用于各种大棚、果园、田间、温室等多种农作物种植区的导航智能小车,该小车自带多类传感器,可大幅降低监控装置的数量,且有效提高检测效率;在田间施工方面,无需对种植区域进行改造,从而有效控制成本。
1 智能小车的外观及性能设计
1.1 方案一
在设计智能小车初期,初步设计方案如图1所示。此方案为“二驱动一从动”式,即头部为两个连接直流无刷减速电机的驱动轮,尾部为一球形万向轮,底板为厚度是1.5 cm的木板,智能小车尾部设计为塔叠式搭载方式,中部为两块12 V蓄电池串连而成[4]。设计完成后,在田间试验时,因配重过重和机械结构设计不合理等原因,导致驱动缓慢、越野效果不理想。

图1 方案一设计方案
1.2 方案二
后期对方案一的设计进行了改进,又大胆改进将车头两轮采用麦克纳姆轮,转向灵活、迅速,同时也增高了底盘离地高度;采用厚度为5 mm的亚克力板作为底盘,与初期的木板相比,亚克力板轻、柔韧性好、结实;小车壳体部分首先采用3D建模,然后由3D打印制作,其它部分采用硬纸板加工而成,外粘防水迷彩贴纸,增加性能的同时兼具设计美观度;驱动上采用4S航模锂电池作为电源,搭载24 V直流加速电机和AQMD驱动板,提供给小车强大的动力支持,以适用于不同地形地势。如图2所示。

图2 后期改进方案
2 智能小车的总体结构设计
总体结构设计如图3所示[5]:
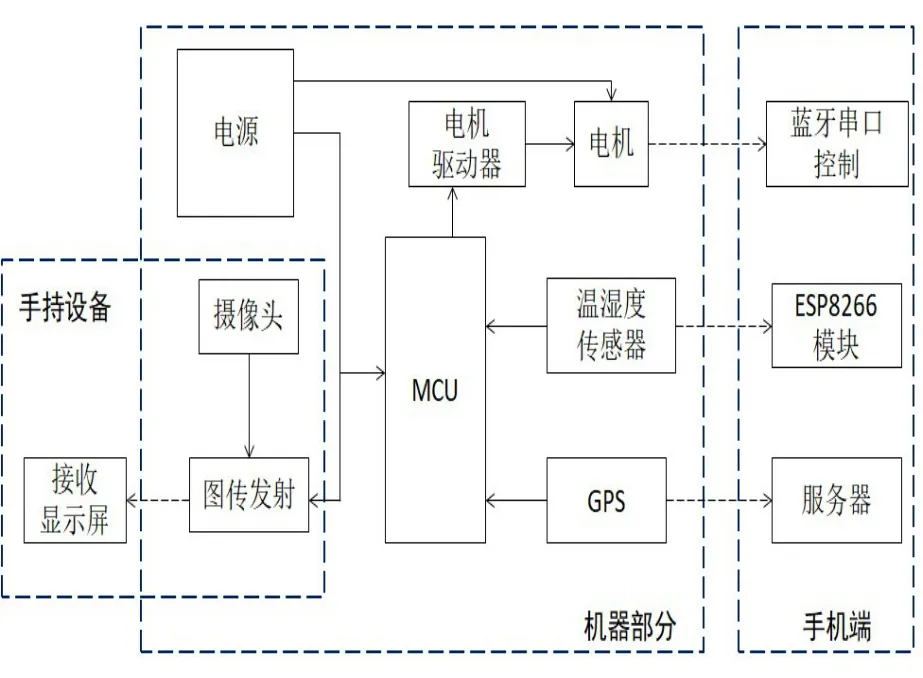
图3 总体结构设计
智能小车总体分为三大系统:运动控制系统、数据采集与无线收发系统及图像传输系统。运动控制系统主要由电机驱动模块,电源调制模块、蓝牙模块组成。通过运动控制系统接收到手机蓝牙传送的信号后,智能小车会做出相应指令的动作反应。信息采集系统与无线收发系统由GPS模块、温湿度传感器模块、WiFi模块、显示模块组成,其中主控制器发出命令后,GPS进行搜星工作,温湿度模块对农作物生长环境的参数进行检测,采集到的信息可反馈显示在智能小车搭载的LCD屏上,并通过WiFi模块可将温湿度信息传送至手机APP,同时通过服务器在手机或网页也可以显示小车的定位信息及行驶轨迹。图像传输系统主要由TS832模块、摄像头模块、雪花屏、内存卡构成,摄像头采集到的农作物图像通过TS832发送传输至手持端雪花屏,并实时储存在内存卡中。
2.1 运动控制系统
本设计采用两个24V直流减速电机作为智能小车的动力支持,电机减速比为4.25,减速机长度为41.5 mm,每分钟额定调速范围105~830 rpm,额定输出功率35 W。如图4和图5所示。霍尔传感器对无刷直流电机进行精确控制,将处理过的霍尔传感器信号反馈给无刷直流电机驱动器,形成了速度、位置双闭环控制,保证电机可实现急停、多级变速等操作。

图4 无刷直流电机安装示意图
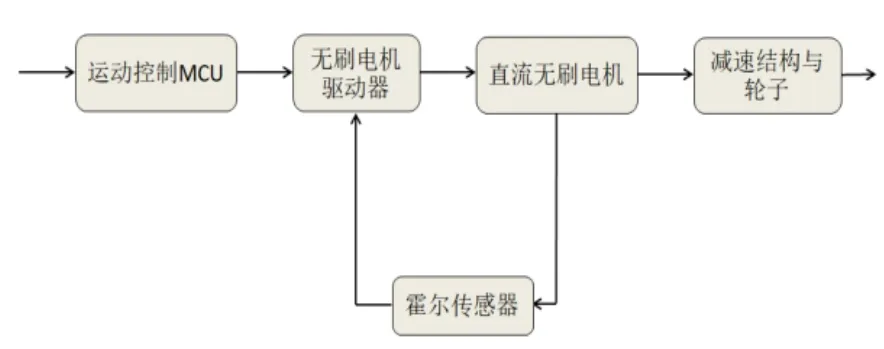
图5 智能小车的动力系统示意图
直流无刷电机的正转、反转、急停、加速等运动动作采用的是PWM电机调速的方法进行控制。HC-05蓝牙模块连接MCU上的串口,当电机驱动器接受到MCU发出的信号后,电机将会产生相应动作。手机蓝牙串口助手向蓝牙模块发出的指令主要有以下两种:
2.1.1 图传避障,键盘操控
通过图传设备可实时直观地反映小车行驶前方路况,操作者能连续操作蓝牙手机键盘,发出左右转向、急停、加速等动作指令,进行规避路障和行驶驱动。
2.1.2 路径预设,自主运行
通过蓝牙键盘可提前预设小车的多种路线方案,每个方案将智能小车行驶的方向、速率、延时时间、转弯等一系列连续指令封装到每个对应按键下,从而每次做重复检测时,只需操作对应按键即可。
2.2 数据采集与无线收发系统
2.2.1 数据采集
智能小车在田间、大棚、果园等种植区域工作时,采集的数据为农作物生长环境的实时温度参数、湿度参数,还有实时的经纬度定位信息、UTC时间、有效搜星数等。同时在智能小车工作前端,可设置温湿度值报警,当有效参数值超过预警值时,小车上蜂鸣器将会持续报警。温湿度采集信息如图6所示。
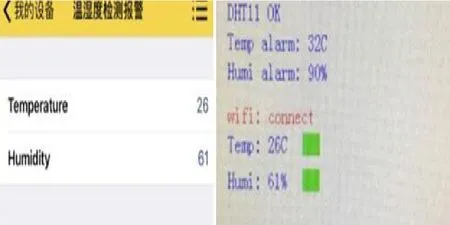
图6 温湿度前端及手机端显示
2.2.2 无线收发
智能小车在前端采集到的数据,通过4G网络及者WiFi两部分上传到服务器,实现动态监测数据显示及路径轨迹突出。其中,一类由温度传感器及湿度传感器DHT11采集到的参数数据通过ESP8266-WIFI模块传输至手机端动态显示;另一类是由GPSNEO-6M模块采集到的经纬度定位信息、UTC时间等数据,通过SIM800模块发送至中国移动Onenet服务器[6-7],如图7所示。
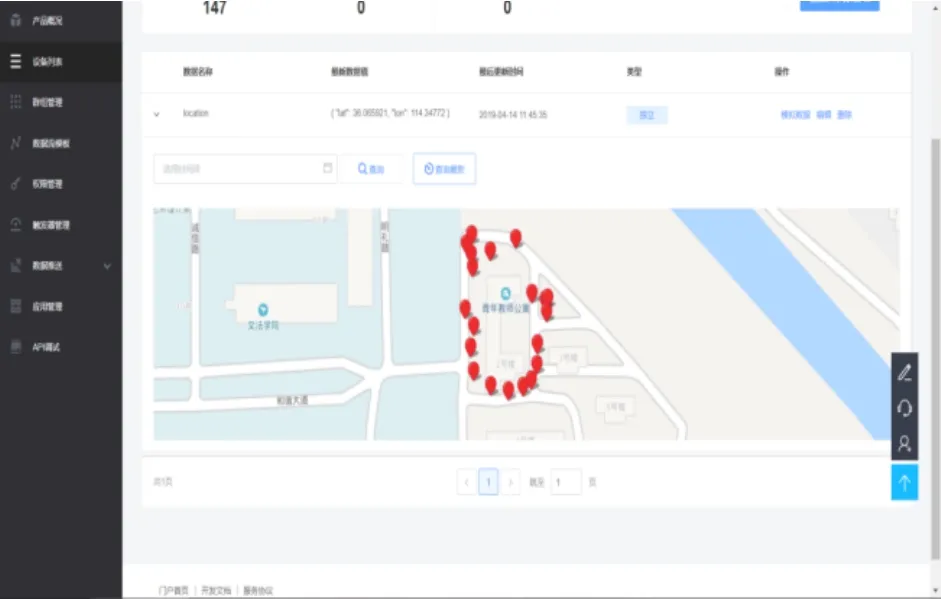
图7 网页端GPS路径轨迹突出
2.3 图像传输系统
图像传输通讯模块分为发送和接收两部分。
发送部分指智能小车采集前端,由TS832发射机、800线高清摄像头、4S锂电池及降压模块组成。因为单片机在采集信息及数据处理上已经占用很大资源,故本设计采用独特的方式—FPV(First Person View)图传形式,它与接收机组成独立系统,大大解放资源,且处理能力更强;接收部分指手持设备端,由一体接收雪花屏和4S锂电池组成。
3 智能小车的软件设计和算法
3.1 软件开发环境
电机驱动程序框图如图8所示。
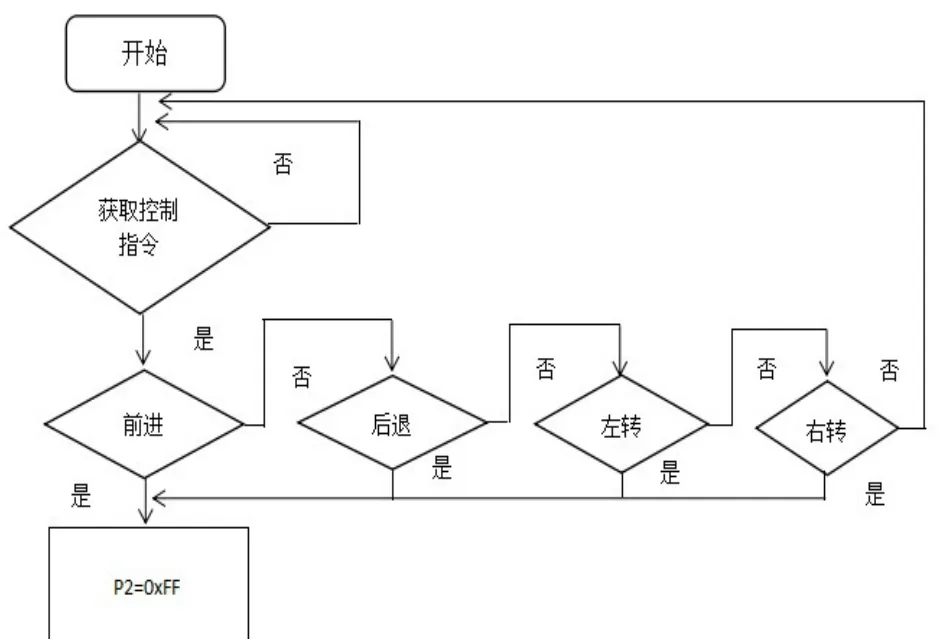
图8 电机驱动程序框图
本设计运用的软件开发环境为MDK-5(又称keil 5),MDK-5包含了工业标准的keilC编译器、宏汇编器、调试器、实时内核等组件,且有业内领先的ARM C/C++编译工具链,完美支持Cortex-M、ARM7、ARM9系列器件,及其他品牌芯片,例如ST、Atmel、Freescale、NXP、TI等众多大公司的微控制芯片。
3.2 智能小车软件设计流程图
软件流程图如图9所示。
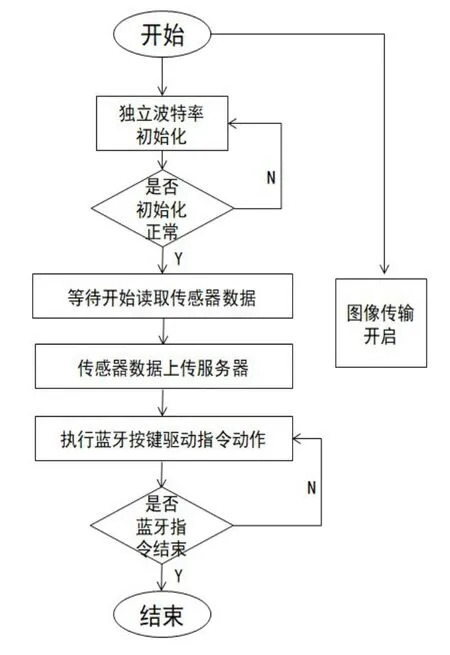
图9 软件流程图
智能小车的软件设计采用模块化思想,由图9可知,电源模块供电,图传模块开始工作,连接MCU的模块按照程序进行初始化;初始化正常跳出判断指令,开始等待传感器进行数据收集与处理,蓝牙模块按手机串口助手发出的指令,对AQMD电机驱动器发出信号,从而电机产生相应动作;当蓝牙模块收到的指令执行结束,跳出判断,程序执行结束。
3.3 电机驱动控制算法
图10为驱动轮和从动轮分布图。

图10 驱动轮、从动轮分布
以下列举已预设的键盘指令来说明控制算法,见表1。(说明:A和B为后驱动轮、C和D为前从动轮;PWM1和PWM2数值模拟电机速率)
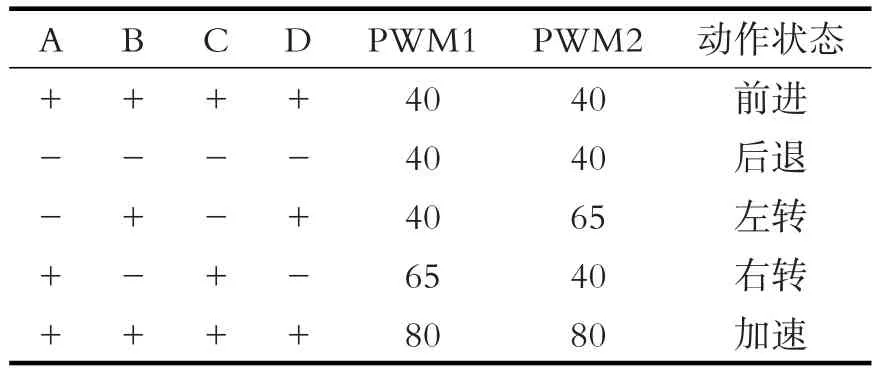
表1 键盘控制指令说明
4 设计总结
本文设计了一款可用于田间、果园、温室、大棚等种植区域的农业信息服务智能巡检小车,结合目前应用最广泛的物联网和传感器技术,智能巡检小车可检测农作物生物环境的温湿度参数,并且通过WiFi-ESP8266模块能在手机端实时显示动态数据,小车前端温湿度参数超过预警值时,小车会持续报警;通过SIM800模块能将智能小车的定位信息和行驶轨迹在手机或网页上实时显示;由图传模块可实现农作物的生长状况进行远程监控。
经过在不同种植区域的多次实验,实验结果表明本文的创新设计可广泛适用于不同地形的田间、果园、大棚、温室等,各个传感器均能有效采集数据,进行反馈,互不干扰实现预期设计结果。本款新型农作物智能巡检小车的设计可很大程度的解放人力物力,具有一定的推广价值和实用价值。