仿生原型毫-微牛级力测试技术研究进展
2021-07-25闫征王立新潘盼
闫征 王立新 潘盼


摘 要:許多动物依靠自然进化形成能够展现优异功能的身体结构,以其作为仿生原型,可为工程领域存在的复杂问题提供有效解决途径。仿生原型毫-微牛级力测试技术可为揭示仿生原型运动力学机制提供必要的测试手段。从呈现优异功能特性的典型仿生原型入手,综述了用于仿生原型运动功能与材料物理特性定量表征的毫-微牛级力测试技术研究进展,重点分析了传感器测力系统、离心运动测力系统、图像处理测力系统的原理与功能,指出仿生原型毫-微牛级力测试技术后续研究应重点关注以下3个方面:1)传感器测力系统应提升其动态响应特性与测试精度,以精确表征仿生原型的运动特性;2)离心运动测力系统应提升测试平台转速信息采集精度与高速摄像机图像清晰度,以准确表征微小仿生原型与材料表面的交互作用;3)图像处理测力系统应考虑如何从图像中精确提取微位移信息,以提高测力系统的测试精度与准确度。
关键词:仿生学;仿生原型;毫-微牛级力;运动特性;测试技术
中图分类号:TB17 文献标识码:A
doi:10.7535/hbkd.2021yx03001
Research progress on milli-micro Newton level force measurement technology of bionic prototype
YAN Zheng, WANG Lixin, PAN Pan
(School of Mechanical Engineering,Hebei University of Science and Technology,Shijiazhuang,Hebei 050018,China)
Abstract:Depending on the excellent functional body structure obtained by the natural evolution, many animals have become bionic prototypes, which provide effective solutions for complex problems in the engineering field. The milli-micro Newton level force measurement technology of bionic prototype can provide the necessary testing instrument for revealing the locomotion mechanical mechanism of these bionic prototypes. Starting from the excellent functional characteristic of typical bionic prototypes, the research progress of milli-micro Newton level force measurement technology for quantitative characterization of the locomotion function and material physical properties of bionic prototypes was summarized. Especially, the principle and function of force measurement system with sensor, the principle and function of centrifugal movement force measurement system and the principle and function of image processing force measurement system were analyzed. Three aspects are pointed out some important aspects that bionic prototype milli-micro Newton level force measurement technology should focus on in the future:the force measurement system with sensor should improve the dynamic response characteristicsand test accuracy, in order to accurately characterizethe motion propertyof the biomimetic prototype; the centrifugal movement force measurement system shouldpromote the accuracy of test platform speed information collection and the imagedefinition of high-speed camera, in order to accurately characterize interaction between the micro-bionic prototype and material surface;theimage processing force measurement systemshould consider how to accurately extract micro-displacement information from images, in order to improve the test precision and accuracyof the force measurement system.
Keywords:bionic;bionic prototype;milli-micro Newton level force;locomotion characteristic;measurement technology
工程仿生学依靠学科前沿性正逐步渗透到人类日常生活各个领域,因通过模拟生物獨特的身体结构与功能特性可为复杂问题提供有效解决途径,而受到国内外众多学者的广泛关注[1]。大自然数百万年的发展演变使得生物逐步获得适应栖息环境的生存能力和独特的运动功能特性。运动是动物繁衍、生殖、捕食的基础,同时也是进行迁徙活动的必备技能,许多动物依靠自然进化形成能够展现优异功能的身体结构,成为备受关注的仿生原型[2-3]。基于为复杂工程问题提供针对性解决途径的意图,国内外众多学者开展对仿生原型运动功能与材料物理特性的定量表征研究,为仿生原型优异功能特性产生机制的科学揭示提供了必要的测试手段,极大促进了仿生原型毫-微牛级力测试技术的发展。本文综述了仿生原型运动功能与材料物理特性定量表征的毫-微牛级力测试技术研究进展,重点分析传感器测力系统、离心运动测力系统、图像处理测力系统的原理与功能,指出仿生原型毫-微牛级力测试技术后续研究应重点关注的方面。
1 仿生原型的优异功能特性
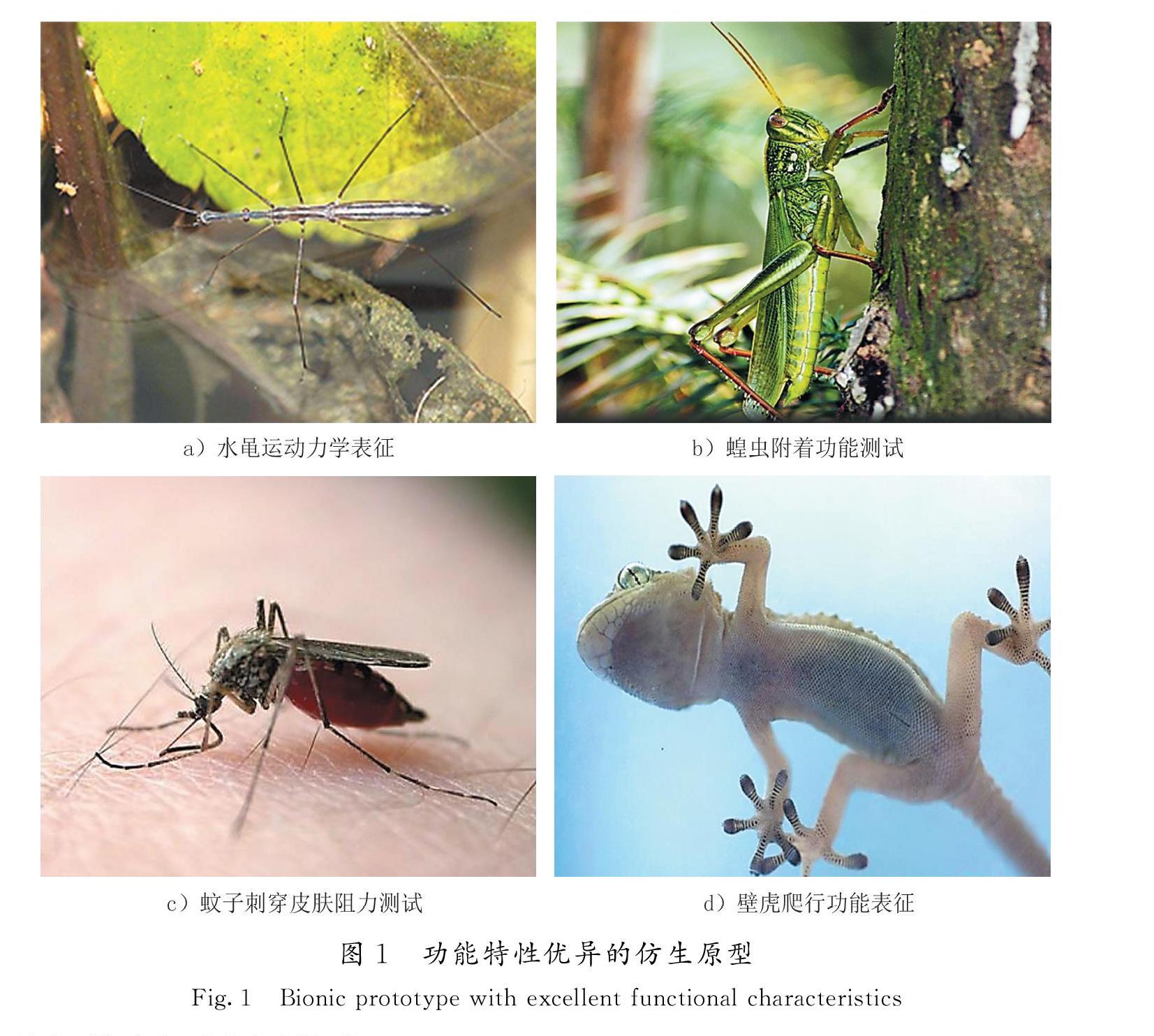
人类借助动植物数百万年进化而来的奇特身体结构与优异功能特性来服务于自身,以期获取工程复杂问题的有效解决途径[4]。水黾、蝗虫、蚊子、壁虎等动物具有优异的运动功能,凭借自身优化而成的身体结构可完成水面站立、表面附着、刺穿皮肤、运动爬行等功能。水黾可在水面稳定站立并能划水前行(见图1 a)),其腿部由微米级刚毛与刚毛表面附着的纳米级螺旋沟槽共同构成的微纳复合结构能够呈现显著的超疏水润湿特性,这对其奇特运动特性发挥着关键作用。有学者开展了水黾腿部脱离水面的运动力学研究,通过PVDF压电传感器来测量脱离力,约为0.31 μN,这为以水黾为仿生原型研制微型水面机器人提供了重要基础[5]。蝗虫拥有独特的附着、弹跳等运动特性(见图1 b)),其弹跳运动原理可为仿生跳跃机器人研制提供设计灵感。蚊子依靠其特有的刺吸式口器能够低阻力刺入人体皮肤,达到吸取血液而不被轻易觉察的目的(见图1 c)),这为无痛注射器仿生研制提供了明确的仿生原型,学者们为此开展了仿生原型、无痛注射针头仿生样件刺入人体皮肤过程中的穿刺阻力测试研究[6-10]。壁虎脚掌表面具有刚毛附着器官(见图1 d)),研究壁虎脚掌刚毛在接触表面迅速黏附、脱黏附的力学机制,测试壁虎在材料表面的运动力学行为,对壁虎运动力学机制揭示和仿生爬壁机器人在结构功能、步态规划和控制规律等方面的设计具有重要意义[11-13]。
东南大学王玉娟团队[14-16]利用手动悬臂移动法将二氧化硅微球(直径15 μm)与猪笼草叶笼滑移区表面接触并施加法向力,测试黏附力和摩擦力用以揭示滑移区的反黏附特性,这为接触力提供了测试手段。昆虫附着系统在材料表面接触力的测试表征是揭示昆虫附着机理的必要环节,以猪笼草滑移区为仿生原型研制致灾农业昆虫捕集滑板,需要测试蝗虫、蚂蚁和飞蛾等致灾农业昆虫在滑移区、捕集滑板的毫牛级附着力和摩擦力[17]。壁虎在墙面、天花板能够平稳附着与自如行走,这得益于其脚掌产生的强大黏附力。南京航空航天大学戴振东团队[18-20]测试壁虎在地面、墙面、天花板的运动接触力以揭示单步态周期内大壁虎的运动特征,结果表明,壁虎采用前脚缓冲、后脚加速的运动方式使其在短时间内以最少能量损耗来达到期望的运动速度,在天花板运动时其前后脚将产生较大的法向反力来确保自身不会掉落,以此显著提高自身运动的安全性和可控性。仿生原型功能特性的定量表征依赖于性能优异的毫-微牛级测力系统,国内外众多学者对此开展了广泛研究。
2 仿生原型毫-微牛级力测试技术
2.1 传感器测力系统原理与功能
AUTUMN等[21-22]研制出二维微牛级压阻式传感器来测试壁虎脚掌刚毛受预加法向载荷作用下在材料表面滑移的黏附力,该测力装置具有2个独立并呈水平、垂直方向的传感器分支,壁虎脚掌刚毛在基底材料滑移5 μm后切向黏附力最大值为(194±25)pN;分析指出壁虎与物体表面产生的黏附作用源于分子间范德华力,这可揭示壁虎爬行时其脚掌刚毛与接触面的黏附机制;测力端硅尖悬臂梁极其精细,制备难度极高,后续研究应对测力端灵敏元件进行等效替代以降低其研制难度。对壁虎脚掌刚毛黏附功能的深入测试表征显示,其黏附功能易受空气湿度影响,黏附力会随湿度增加而增大,这使壁虎黏附机制研究进入了新阶段[23-24]。HUBER等[25]为测试壁虎脚掌刚毛黏附力,将从壁虎脚掌上切下的刚毛粘在原子力显微镜悬臂末端,再与基底接触用以测试黏附力,测试过程中获取悬臂梁的位移信息,再根据力-位移特性方程计算得到黏附力数据,结果显示刚毛拉脱试验中的黏附力约为10 nN,该测试数据准确表征了壁虎脚掌单根刚毛在材料表面的黏附强度。上述测力设备仅适用于测试非活体生物,应研制适用于测试活体生物足掌刚毛黏附力的测试系统,以使结果数据更加接近真实状况。
南京航空航天大学戴振东团队[26]研制出多量程三维力传感器来测试水黾运动接触力(见图2 a)),由16个三维微力传感器组成4×4式传感器阵列,量程为10 mN,分辨力可达10 μN,研究发现水黾在水面的划行力为0.87~1.32 mN,且单位腿长的划行力为0.3~0.4 mN/cm;数据显示水黾运动划行力与自身体重成正比,水黾还会依靠水面安全裕度来保证身体不陷入水花。该团队后续研制出测试壁虎足掌三维接触力的测试系统(见图2 b)和图2 c)),由16个传感器组成2×8式传感器阵列,用于测试壁虎行走过程中在材料表面产生的接触力,量程为1.5 N,分辨力为3 mN[27]。该测力设备获取的壁虎运动特征数据,可加深学者对壁虎运动功能的认知,并能推动仿生爬壁机器人的研制,未来应研制适合壁虎远距离爬行的测试平台,以获取更加符合实际的运动特征信息。
田树林等[28]研制三维力传感器测试系统用来测试动物爬壁过程中脚掌与材料表面的接触力,该测力系统由测力传感器阵列、信号调理模块、数据采集模块、动态图像记录模块等部分组成,其中测力传感器为自行研制的H型双孔平行梁式毫牛级力传感器,高速摄像机可获取爬壁过程中的直观影像资料;将树蛙作为测试对象进行垂直表面上的运动力学测试,结果显示树蛙爬行过程中的横向接触力为7 mN,纵向接触力为170 mN,法向接觸力为68 mN;静止状态下树蛙的横向接触力为3 mN,纵向接触力为 63 mN,法向接触力为30 mN。这些力学数据可加深学者对树蛙运动特性的认知,为深入研究动物爬壁过程中运动规律和功能特性提供测试手段,并为性能优异的仿树蛙爬壁机器人的研制提供数据基础;未来研究应提升测力传感器的制造工艺,充分考虑测力传感器的动态力学性能,以使试验数据更具准确性。
JI等[29]研制出由上下交错共24个三维力传感器组成的仿圆柱正八边形阵列测力系统,选择T型三维毫牛级力传感器作为测量元件,以树蛙为测试对象进行爬壁过程的接触反力测试,结果显示树蛙在高曲率表面运动时其脚掌将产生用以黏附于曲面或非黏性材料表面的法向力,分析指出树蛙运动时其前肢起主导作用而后肢起辅助冗余作用。该测试系统用以获取动物在仿圆柱体表面上爬壁过程的黏附力,但该项测试仅研究动物在基底的局部表面运动,不能进行其他复杂表面的黏附力测试,后续研究应重点关注树蛙在不同层次表面、复杂曲面上的运动力学测试,以推动仿爬壁机器人的研制。SUN等[30]利用PVDF材料研制出新型动态力传感器来测定不同提升速度下水黾腿部脱离水面的附着力,测试方法为将体积为5 μL的液滴滴落至力传感器表面,随后将水黾腿部与液滴脱离并建立脱离水面模型,通过光学显微镜和高帧数摄像机来观测水面变形程度,根据力与提升速度的关系来分析附着力的影响因素以调控机制,测试结果显示提升速度由0.02 m/s上升至0.40 m/s时水黾腿部附着力明显下降,分析指出微纳复合结构是保证其在水面快速划行的关键因素。
为满足工程仿生研究对仿生原型产生的毫-微牛级力测试需求,人们研制出毫-微牛级二维力测试系统(见图3),量程为800 mN,精度可达50 μN;基于LabVIEW编写数据处理与界面显示程序,可显示与存储仿生原型产生的毫-微牛级力;运行结果显示酸枣树钩刺刺入动物肝脏的刺穿阻力最大为329.76 mN,表明该系统能够满足仿生原型的测试需求[31]。该毫-微牛级二维力测试系统所采用的平行双簧片悬臂梁的弹簧片厚度为100~200 μm,易受到温度、湿度、振动等外界环境因素影响,对测试系统的准确性造成不利影响;后续研究需要研制功效持久稳定且不受外界因素干扰的平行双簧片悬臂梁。
学者研制出的附着力测试系统量程为0~3 N,精度为1 mN,基于LabWindows/CVI编写的数据采集程序能够实时显示附着力的变化;该测试系统可准确获取蝗虫在不同材料与倾斜角度捕集滑板的附着力,可为昆虫附着系统与材料表面交互作用的定量表征提供可供选择的测试手段[32-34]。后续需对该测力系统硬件结构进行优化,研制出拉压式微力测试系统,可满足致灾农业昆虫捕集滑板仿生研制过程中需要测试昆虫在材料表面的附着力、摩擦力和剪切力、断裂力的需求[35];利用该拉压式微力测试系统测试蝗虫爪尖的剪切力,结果为197.4~243.6 mN[36-37]。该测力系统能够准确获取仿生原型在材料表面产生的附着力与摩擦力,还可准确表征仿生原型本身的剪切力与断裂力,为仿生原型运动特性与材料特性的精确表征提供了必要的技术手段。
AZUMA等[38-39]利用自行研制的三维力传感器测试果蝇运动产生的飞行力,果蝇身体质量为1 mg且身体长度为3 mm,翅膀的扑动频率为200 Hz,通过固化胶将探针与果蝇背部进行黏合,悬臂探针发生形变时会使得压敏电阻阻值发生变化,利用探针产生的形变量与弹性系数相乘进行微力测量,测力数值会随着果蝇翅膀拍打频率实时变化,测试发现果蝇飞行力的最大值为40 μN。该测力系统可为研究飞行昆虫运动功能提供必要的测力设备,能够为小型飞行机器人仿生研制提供基础数据;后续工作应研制无干扰状态下飞行昆虫运动功能定量表征的测力设备,以获取更加切合实际的数据信息。
2.2 离心运动测力系统原理与功能
离心式测力系统的研制主要基于离心原理设计,测试对象被放置在测试平台表面,测试对象与测试平台表面产生的附着力为其提供离心运动所需要的离心力,电机转速不断增大,测试平台转速增加,测试对象与测试平台间产生的附着力不足以维持离心运动所需要的离心力,导致测试对象脱离测试平台,测试对象与测试平台发生脱离时的离心力即为测试对象的最大附着力。
LABONTE等[40]和FEDERLE等[41]利用离心原理测试昆虫在材料表面产生的附着力,根据高帧数摄像机在临界脱离时刻采集到的图像即可获取离心运动半径信息,结合该时刻的离心运动转速与测试对象质量,便可计算获取最大附着力。后续有学者对上述离心测力运动装置进行优化,研制出可调整测试平台角度的离心运动测力系统,结果显示当测试平台倾斜角度为90°时,蚂蚁在垂直玻璃表面上的脱离转速为305 r/min,垂直方向的最大附着力为1.02 mN[42-43]。学者持续优化基于离心原理的测力系统结构,使其运行更加平稳并可显著提高测试精度(0.1 mN),可用于精确表征蚂蚁、甲虫和飞蛾等仿生原型在不同材料表面的运动特性[44]。该类测力仪器可定量表征体型较小昆虫的运动功能,获取的运动特征信息能够揭示仿生原型与接触表面的相互作用机制;后续研究应关注转速信息采集精度与高速摄像机图像清晰度,以提高吸附力信息的精确度。
2.3 图像处理测力系统原理与功能
图像处理技术是借助计算机强大的图像处理功能将高速摄像机所拍摄的图像进行分析处理以获取微小变形量,据此计算出测试对象与材料表面、液态环境等所产生的微-纳级运动力。清华大学田煜团队[45-47]利用阴影提取法观测水黾腿部与水面接触产生的阴影面积来计算获取运动支撑力,根据水黾在水面上划行产生的阴影,通过阿基米德原理对水黾腿部进行三维模型重建并计算获取所产生的运动支撑力;结果表明水黾运动支撑力受水面凹陷深度、宽度和长度影响,最大水面凹陷深度与运动支撑力不成正比,水黾腿部产生的水涡深度为0.02~0.09 mm,支撑力为0.3~1.0 μN,这为揭示水黾腿部运动支撑力的大小并为研制出功能优异的仿生水黾机器人提供数据基础。后续该团队利用阴影提取法观测水黾腿部的运动阴影图像(见图4),测试装置的正上方放置点光源,通过照射水黾体表而在水面底部产生阴影区域,照相机放置于水容器正下方可拍摄获取水黾在水面站立时产生的阴影面积,通过对所拍摄的阴影图像进行分析,计算获取运动支撑力;结合水黾运动数据和运动轨迹对其腿部功能特性与运动机理进行研究,结果表明水黾前肢和后肢支撑身体重量以起到稳定作用,后腿可调整运动方向和行进速度,这为研制可在水面行走并具备高推进效率的微型水面机器人提供了理论支持[48]。基于图像处理技术进行昆虫运动支撑力测试需要采集大量高清图片并提取微位移数据信息,高速摄像机在帧数、像素等方面的选择至关重要,后续研究应考虑如何从图像中更加精确地提取微位移信息,以提高测力系统的准确度。
ZHANG等[49]搭建摩擦力测试装置用来定量分析猪笼草叶笼滑移区的减摩效应,将蟋蟀前腿与测试材料表面接触并施加法向力,使两者间产生相对滑动以使悬臂梁产生挠度,用来间接获取摩擦力,结果显示昆虫因其体重不同而在滑移区产生的减摩效果也不同,滑移区因月骨体产生的各向异性能够显著影响测试对象的摩擦行为。辽宁工业大学孔祥清团队[50]研制精度可达0.1 μN的新型微力测试装置,量程为2 000 μN,该测力装置具有较高的测试精度,可为水生昆虫腿部运动支撑力测试系统研制提供技术参考,并可推动仿生水面机器人的研制。运用高帧数摄像机获取仿生原型运动视频并转换成图像,再基于图像处理技术分析图像计算获取腿部结构在水面的浮力,具有测试精度高、易于操作等特点。
3 研究与展望
生物在经历数百万年的自然进化后逐渐形成了适应栖息环境的生存能力,以水黾、蝗虫、蚊子、壁虎等动物为仿生原型进行支撑力、附着力、跳跃力、刺穿力、爬行力等运动特性与材料特性研究,可定量表征仿生原型的功能机制,形成明确的仿生原理,为解决复杂工程问题提供理论基础。本文从自然界生物所拥有的优异功能特性入手,综述了用于仿生原型运动特性与材料特性定量表征的测力技术研究进展,重点分析了传感器测力系统、离心运动测力系统、图像处理测力系统的原理与功能。
仿生原型测力技术目前存在的问题与后续研究需要重点关注的方面主要有以下4点。
1)测力传感器动态响应特性低与仿生原型运动空间小 测力传感器的动态响应特性是准确测试昆虫运动力学特征的关键,材料属性、制备工艺等会对测力传感器的动态响应特性产生较大影响,进而影响测试数据的准确性。未来研究应优化测力传感器的制备工艺,提升传感器的动态响应特性,以精确表征仿生原型的运动力学特性。昆虫运动力学特性测试过程中,运动空间小会影响昆虫的生理活性,导致无法准确获取昆虫正常状态下的运动力学特征信息,因此应增大测力系统的测试平台,以获取更加切合真实状况的昆虫运动力学特性信息。
2)基于离心运动测力系统转速信息获取精度低 小型昆虫附着力的准确测试依赖于离心运动测力系统转速信息的精确获取,应保证转速信息的采集精度,提高对微小仿生原型附着系统与材料表面交互作用的定量表征准确性。
3)基于图像处理测力系统的图像采集清晰度低 高速摄像机所采集图像的清晰度会对测力准确性产生影响,应选择帧数和像素相匹配的高速摄像机来获取像素较高的图像,并对图像进行后期处理,以提高微位移信息的提取准确度,获取更加精确的昆虫运动力学信息。
4)无干扰状态下仿生原型接触反力测试系统研制不足 仿生原型(甲虫、苍蝇等飞行昆虫)运动特性的定量表征需要获取其在无干扰状态下的接触反力测试数据,这需要研制测试过程无干扰的昆虫接触反力测试系统,满足测试过程无干扰,精确获取仿生原型起飞/降落过程中的运动力学特性,为微型飞行器仿生研制提供原始数据基础。
生物在经历数百万年的自然进化后逐渐形成了适应栖息环境的生存能力,以水黾、蝗虫、蚊子、壁虎等动物为仿生原型进行支撑力、附着力、跳跃力、刺穿力、爬行力等运动特性与材料特性研究,可定量表征仿生原型的功能机制,形成明确的仿生原理,为解决复杂工程问题提供理论基础。后续研究过程中,传感器测力系统应提升传感器的动态响应特性,降低外部环境因素的干扰,以精确表征无干扰状态下仿生原型的运动特性与材料特性;离心运动测力系统应关注转速信息采集精度与高速摄像机图像清晰度,提高对微小仿生原型附着系统与材料表面交互作用的定量表征准确性;图像处理测力系统应考虑如何从图像中更加精确地分析提取微位移信息,提高测力系统的测试精度。
参考文献/References:
[1] 孙久荣,戴振东.仿生学的现状和未来[J].生物物理学报,2007,23(2):109-115.
SUN Jiurong,DAI Zhendong.Bionics today and tomorrow[J].Acta Biophysica Sinica,2007,23(2):109-115.
[2] 梁云虹,任露泉.自然生境及其仿生學初探[J].吉林大学学报(工学版),2016,46(5):1746-1756.
LIANG Yunhong,REN Luquan.Preliminary study of habitat and its bionics[J].Journal of Jilin University (Engineering and Technology Edition),2016,46(5):1746-1756.
[3] 罗静,樊俊兵,王树涛.纳米生物仿生技术研究进展[J].中国科学:生命科学,2020,50(7):715-733.
LUO Jing,FAN Junbing,WANG Shutao.Research progress of nano-bio-inspired technology[J].Scientia Sinica(Vitae),2020,50(7):715-733.
[4] BUSH J W M,HU D L.Walking on water:Biolocomotion at the interface[J].Physics Today,2005,38(1):339-369.
[5] 韩亚倩.基于静电力的微力传感器标定系统设计与应用研究[D].天津:天津大学,2017.
HAN Yaqian.Design and Application of the Microforce Sensor Calibration System Based on Electrostatic Force[D].Tianjin:TianjinUniversity,2017.
[6] 王京春,陈禹,李因武.仿生针刺作用下的高粘弹性材料减阻性能分析[J].科技通报,2017,33(11):44-46.
WANG Jingchun,CHEN Yu,LI Yinwu.Resistance reduction analysis for high viscoelastic material pierced by bionic-pinhead[J].Bulletin of Science and Technology,2017,33(11):44-46.
[7] 齐迎春,丛茜,齐欣.仿生减阻针头穿刺过程中力学行为分析[J].医用生物力学,2012,27(4):427-431.
QI Yingchun,CONG Qian,QI Xin.Mechanical behavior of bionic drag reduction needle during puncturing process[J].Journal ofMedical Biomechanics,2012,27(4):427-431.
[8] 王骥月,丛茜,齐欣,等.基于蝉口针形态的仿生针头结构优化设计及减阻机理分析[J].吉林大学学报(工学版),2014,44(3):696-700.
WANG Jiyue,CONG Qian,QI Xin,et al.Optimum structural design and analysis of drag reductionmechanism of bionic needlesinspired by cicada stylet[J].Journal of Jilin University(Engineering and Technology Edition),2014,44(3):696-700.
[9] 弯艳玲,丛茜,齐迎春,等.凹槽形仿生针头减阻试验及机理分析[J].中国机械工程,2013,24(7):922-925.
WAN Yanling,CONG Qian,QI Yingchun,et al.Drag reduction experiment and mechanism analysis of concave groove needle[J].China Mechanical Engineering,2013,24(7):922-925.
[10]齐迎春,丛茜,王骥月,等.凹槽形仿生针头优化设计与减阻机理分析[J].机械工程学报,2012,48(15):126-130.
QI Yingchun,CONG Qian,WANG Jiyue,et al.Optimization design and drag reduction mechanism research on groove shape bionicneedle[J].Journal of Mechanical Engineering,2012,48(15):126-130.
[11]王周义,王金童,吉爱红,等.大壁虎在天花板表面的运动行为与动力学研究[J].科学通报,2010,55(9):841-848.
WANG Zhouyi,WANG Jintong,JI Aihong,et al.Gecko′s movement behavior and dynamics research on ceiling surface[J].Chinese Science Bulletin,2010,55(9):841-848.
[12]赵林林,于敏,戴振东.壁虎脚掌刚毛接触力学性能试验研究[J].润滑与密封,2011,36(7):40-42.
ZHAO Linlin,YU Min,DAI Zhendong.Experimental studies on contact mechanics of geckos′ foot setae[J].Lubrication Engineering,2011,36(7):40-42.
[13]吉爱红,葛承滨,王寰,等.壁虎在不同粗糙度的竖直表面的黏附[J].科学通报,2016,61(23):2578-2586.
JI Aihong,GE Chengbin,WANG Huan,et al.Adhesion of gecko on vertical surfaces with different roughness[J].Chinese Science Bulletin,2016,61(23):2578-2586.
[14]畢可东,宋小闯,王玉娟,等.猪笼草蜡质滑移区表面反粘附特性的研究[J].机械工程学报,2015,51(23):103-109.
BI Kedong,SONG Xiaochuang,WANG Yujuan,et al.Anti-adhesion mechanisms of nepenthes waxy slippery zone surface[J].Journal of Mechanical Engineering,2015,51(23):103-109.
[15]王玉娟,宋小闯,陈云飞.猪笼草捕虫笼超滑表面黏附特性测量和抗黏稳定性分析[J].东南大学学报(自然科学版),2017,47(2):259-264.
WANG Yujuan,SONG Xiaochuang,CHEN Yunfei.Measurement of adhesion properties and analysis of anti-adhension stability onsuper-slippery surfaces of nepenthes pitchers[J].Journal of Southeast University(Natural Science Edition),2017,47(2):259-264.
[16]王玉娟,宋小闯,杨决宽,等.典型构筑植物表面不同湿度条件下黏附和摩擦特性研究[J].机械工程学报,2017,53(21):86-94.
WANG Yujuan,SONG Xiaochuang,YANG Juekuan,et al.Adhesion and friction properties of plant surfaces with typical architectures in different humidity conditions[J].Journal of Mechanical Engineering,2017,53(21):86-94.
[17]王立新,周强.基于猪笼草叶笼滑移区仿生的蝗虫捕集滑板功效测试[J].农业机械学报,2011,42(5):222-225.
WANG Lixin,ZHOU Qiang.Function testing of locust slippery plate manufactured based on waxy zone of nepenthes pitchers[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(5):222-225.
[18]DAI Zhendong,WANG Zhouyi,JI Aihong.Dynamics of gecko locomotion:A force-measuring array to measure 3D reaction forces[J]. The Journal of Experimental Biology,2011,214(5):703-708.
[19]王周义,顾文华,吴强,等.墙面及天花板上大壁虎脚趾作用力测试和脚掌形态研究[J].中国科学:技术科学,2011,41(9):1161-1166.
WANG Zhouyi,GU Wenhua,WU Qiang,et al.Morphology and reaction force of toes of geckos freely moving on ceilings and walls [J].Scientia Sinica Technologica,2011,41(9):1161-1166.
[20]WANG Zhouyi,WANG Jintong,JI Aihong.Behavior and dynamics of geckos locomotion:The effects of moving directions on avertical surface[J].Chinese Science Bulletin,2011,56(6):573-583.
[21]AUTUMN K,PEATTIEA M.Mechanisms of adhesion in geckos[J].Integrative & Comparative Biology,2002,42(56):1081-1090.
[22]AUTUMN K,LIANG Y A,HSIEH S T,et al.Adhesive force of a single gecko foot-hair[J].Nature,2000,405(6787):681-685.
[23]HUBER G,MANTZ H,SPOLENAK R,et al.Evidence for capillarity contributions to gecko adhesion from single spatula nanomechanical measurements[J].Proceedings of the National Academy of Sciences of the United States of America,2005,102(45):16293-16296.
[24]SUN Wanxin,NEUZIL P,KUSTANDI T S,et al.The nature of the gecko lizard adhesive force[J].Biophysical Journal,2005,89(2):14-17.
[25]HUBER G,GORB S N,SPOLENAK R,et al.Resolving the nanoscale adhesion of individual gecko spatulae by atomic force microscopy[J].Biology Letters,2005,1(1):2-4.
[26]吉爱红.动物运动接触反力测试系统、实验与分析[D].南京:南京航空航天大学,2007.
JI Aihong.Animals Surface Reaction Forces:Measuring System,Experiments and Analysis[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2007.
[27]張正杰.壁虎脚掌3维接触力测试系统研制[D].南京:南京航空航天大学,2006.
ZHANG Zhengjie.Development of Measuring System for Insect′ 3-dimensional Ground Reaction Force[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2006.
[28]田树林,王卫英,李伟.动物接触力测试系统的研制与应用[J].测控技术,2011,30(4):5-7.
TIAN Shulin,WANG Weiying,LI Wei.Development of measuring system for animal′s surface reaction force[J].Measurement & Control Technology,2011,30(4):5-7.
[29]JI Aihong,YUAN Shanshan,ENDLEIN T,et al.A force-measuring and behaviour-recording system consisting of 24 individual 3D force plates for the study of single limb forces in climbing animals on a quasi-cylindrical tower[J].Bioinspiration & Biomimetics,2019,14(4):046004.
[30]SUN Peiyuan,ZHAO Meirong,JIANG Jile,et al.The study of dynamic force acted on water strider leg departing from water surface[J].AIP Advances,2018,8(1):015228.
[31]李云鹏,王立新,闫世兴,等.仿生原型毫-微牛级二维力测试系统研制[J].河北科技大学学报,2020,41(2):105-113.
LI Yunpeng,WANG Lixin,YAN Shixing,et al.Design of bionic prototype milli-micro Newton level two-dimensional force testsystem[J].Journal of Hebei University of Science and Technology,2020,41(2):105-113.
[32]王立新,周强,罗瑞龙,等.蝗虫在滑移捕集滑板上的附着力测试[J].农业机械学报,2010,41(12):195-198.
WANG Lixin,ZHOU Qiang,LUO Ruilong,et al.Attachment force test of locust on slippery trapping plates[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(12):195-198.
[33]WANG L X,ZHOU Q.Friction force of locust locusta migratoria manilensis (Orthoptera,Locustidae) on slippery zones of pitchers from four nepenthes species[J].Tribology Letters,2011,44(3):345-353.
[34]WANG Lixin,ZHOU Qiang,XU Shuyan.Role of locust Locusta migratoria manilensis claws and pads in attaching to substrates[J].Science Bulletin,2011,56(8):789-795.
[35]王立新,李荣廷.基于虚拟仪器Labwindows/CVI的拉压式微力测试系统设计[J].河北科技大学学报,2013,34(6):487-493.
WANG Lixin,LI Rongting.Design of tension & compression micro force measuring system based on virtual instrument Labwindows/CVI[J].Journal of Hebei University of Science and Technology,2013,34(6):487-493.
[36]王立新,崔彦平,周强.灾害蝗虫附着系统爪尖的剪切强度测算[J].农业工程学报,2014,30(17):71-77.
WANG Lixin,CUI Yanping,ZHOU Qiang.Shear strength calculation of claw tip in attachment system of plague locust Locusta migratoria manilensis[J].Transactions of the Chinese Society of Agricultural Engineering,2014,30(17):71-77.
[37]王立新,黃风山,周强.致灾农业昆虫捕集滑板表面结构仿生构建与性能验证[J].农业工程学报,2015,31(20):34-40.
WANG Lixin,HUANG Fengshan,ZHOU Qiang.Surface structure biomimetic design and performance testing of slippery trapping plate used for controlling agricultural insect[J].Transactions of the Chinese Society of Agricultural Engineering,2015,31(20):34-40.
[38]AZUMA K,TAKAHASHI H,KAN T,et al.Triaxial force sensor with strain concentration notch beam for measurement of insect flight force[C]// IEEE International Conference on Micro Electro Mechanical Systems.Paris:IEEE,2012:140-143.
[39]AZUMA K,TAKAHASHI H,KAN T,et al.Quantitative evaluation of the influence of dopaminergic neuron on flapping locomotion[C]// 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS).[S.l.]:IEEE,2013:5-8.
[40]LABONTE D,FEDERLE W.Scaling and biomechanics of surface attachment in climbing animals[J].Philosophical Transactions ofthe Royal Society of London,2015,370(1661):20140027.
[41]FEDERLE W,ROHRSEITZ K,HOLLDOBLER B.Attachment forces of ants measured with a centrifuge:Better ‘wax-runners have a poorer attachment to a smooth surface[J].Journal of Experimental Biology,2000,203(3):505-512.
[42]周群,何斌,岳继光.蚂蚁的吸附力来源及其分泌液作用[J].力学学报,2007,39(3):428-432.
ZHOU Qun,HE Bin,YUE Jiguang.Source of attachment forces of ants and the secretion effect[J].Chinese Journal of Theoretical and Applied Mechanics,2007,39(3):428-432.
[43]周群,何斌,钱明刚,等.昆虫足垫吸附系统的摩擦力和吸附力实验分析[J].上海理工大学学报,2008,30(2):143-146.
ZHOU Qun,HE Bin,QIAN Minggang,et al.Analysis on friction and adhesive force of insects pads[J].Journal of University of Shanghai for Science and Technology,2008,30(2):143-146.
[44]王立新,翟利刚.离心式昆虫微力测试系统设计[J].河北科技大学学报,2014,35(1):1-5.
WANG Lixin,ZHAI Ligang.Design of centrifugal insect micro-force measuring system[J].Journal of Hebei University of Science and Technology,2014,35(1):1-5.
[45]ZHENG Yelong,LU Hongyu,YIN Wei,et al.Elegant shadow making tiny force visible for water-walking arthropods and updated archimedes′ principle[J].Langmuir,2016,32(41):10522-10528.
[46]YIN Wei,ZHENG Yelong,LU Hongyu,et al.Three-dimensional topographies of water surface dimples formed by superhydrophobic water strider legs[J].Applied Physics Letters,2016,109(16):163701.
[47]ZHENG Yelong,LU Hongyu,JIANG Jile,et al.Walking of spider on water surface studied from its leg shadows[J].Chinese PhysicsB,2018,27(8):084702.
[48]LU Hongyu,ZHENG Yelong,YIN Wei,et al.Propulsion principles of water striders in sculling forward through shadow method[J].Journal of Bionic Engineering,2018,15(3):516-525.
[49]ZHANG Pengfei,CHEN Huawei,ZHANG Deyuan.Investigation of the anisotropic morphology-induced effects of the slippery zone in pitchers of nepenthes alata[J].Journal of Bionic Engineering,2015,12(1):79-87.
[50]吳宏福,孔祥清,曲艳东.一种微小水生昆虫水面浮力测量装置的设计[J].科技通报,2017,33(10):15-19.
WU Hongfu,KONG Xiangqing,QU Yandong.Design of the measuring system for water-supporting force of small aquatic insects[J].Bulletin of Science and Technology,2017,33(10):15-19.