基于微型自耕机混合动力控制方法及混合机械动力装置设计*
2021-07-25林蔚然杨忠昌王龙兵董宝光
赵 萌,林蔚然,杨忠昌,王龙兵,董宝光,陈 凯,曹 猛
(清华大学基础工业训练中心,北京 100084)
0 引言
随着中国农业机械化的发展,农业机械在农业生产中得到了大规模应用[1]。目前农业机械的主要动力来源仍为柴油机等燃油机,通过将动力转换为电机的电力并驱动农业机械运行[1]。目前我国农业以户为单位,规模较小,农机功率不高.而柴油机在低功率运行状态下动态响应时间较慢[2],因而,在耕作中碰到突然变化的坚硬地块,需要实时增加柴油机输出功率时,需要一定时间才能进行响应,可能导致农机的熄火,降低了农机运行的可靠性,同时,频繁熄火和点火,也会导致能源浪费。
针对上述问题,本文提出一种混合动力控制方法及混合动力装置。该项目的技术难点,是农业机械的混合动力装置控制及混合动力微型自耕机整机设计。而提供动力控制的技术难点有以下方面。
(1)对混合动力系统平台的搭建,及分析微型自耕机机械混合动力控制工作模式的技术难点。
(2)氢燃料混合动力微型自耕机的控制设计原理图的技术问题。农机的主要零部件在机器中的放置位置:第1动力源、第2动力源、动力控制器、能量回收器之间的位置及相互关系的技术难点。以及能量回收的核心零件和制动器的技术结构难点。
(3)调配及充放电管理等技术难点。需要解决如下问题:如何最大化能量利用率;如何达到低成本和高功率的最优匹配;如何优化农机的主要零部件在机器中的放置相互位置。
由于本次研究方向主要致力于节能,节约成本,提高效率,所以需要建立可以量化各种标准的模型来贴合该情况。于是,通过一定的建模手段仿真模拟工作环境,进行技术实施并模拟。借助Simulink作为仿真建模工具,进一步开发出新的供电方式并进行模拟,求出高能量密度和高功率密度的互补的最优条件[3];在此基础上,结合农业作业实际需求,设置合适的切换挡位和对应工作模式,根据不同的模式所需,反馈调节动力装置,设计高效率电池供电,在保证功率的情况下最大可能地节省资源。农机的整体结构通过三维软件Sloidworks进行建模,完成机械结构的设计,并实现样机测试。利用混合动力,不断调整,并且对成品进行测试评估。
1 Simulink软件
Simulink是一种基于MATLAB的框图设计环境的可视化仿真工具,可以实现动态系统建模、仿真和分析[4],被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真。在其提供的仿真和综合分析集成环境动态系统中建模,无需大量手写程序,只需要通过简单直观的鼠标操作,就可以构造出复杂的系统。具有应用面广、结构和流程清晰及仿真精细、贴近实际效率高灵活等优点,广泛应用于理论控制和数字信号处理的复杂仿真和设计。通过Simulink软件的分析,可实现高能量密度和高功率密度的优势互补。其优势如下:
(1)最大限度地优化农机的续航和载荷,满足农用机械长续航及不同工况下对功率的实时需求;
(2)通过能量回收器和动力控制器,将制动能量自动回收到第2动力源,以提高能量的利用效率;
(3)第1动力源可提供农机的稳定功率需求,具有能量来源稳定的特点,满足农业生产对长续航的需求。
2 技术方案及实施
2.1 建立模型
利用Simulink软件,开发氢燃料-锂离子电池混合动力系统仿真平台。在本项目中,用Simulink进行仿真分析,如图1所示,第1动力源是氢燃料电池,第2动力源是锂电池,利用氢燃料电池提供持续稳定的输出功率[5],利用锂电池优化的动态响应时间,从而将氢燃料电池和锂电池组成农机的混合动力单元,以氢燃料电池作为农机的稳定功率输出单元,采取动力控制器的功率控制方式,实时调节氢燃料电池的功率输出;锂电池作为农机的瞬时动力单元,利用动力控制器的电压控制方式输出相应的输出功率,从而结合氢燃料电池的功率控制方式以及锂电池的电压控制方式,实现农机在稳态功率下保持燃料电池的输出指定功率,暂态(突发阻碍或突发松软)工况下,利用锂电池充放电的快速动态响应时间特性,实现农机输出功率的实时调节。
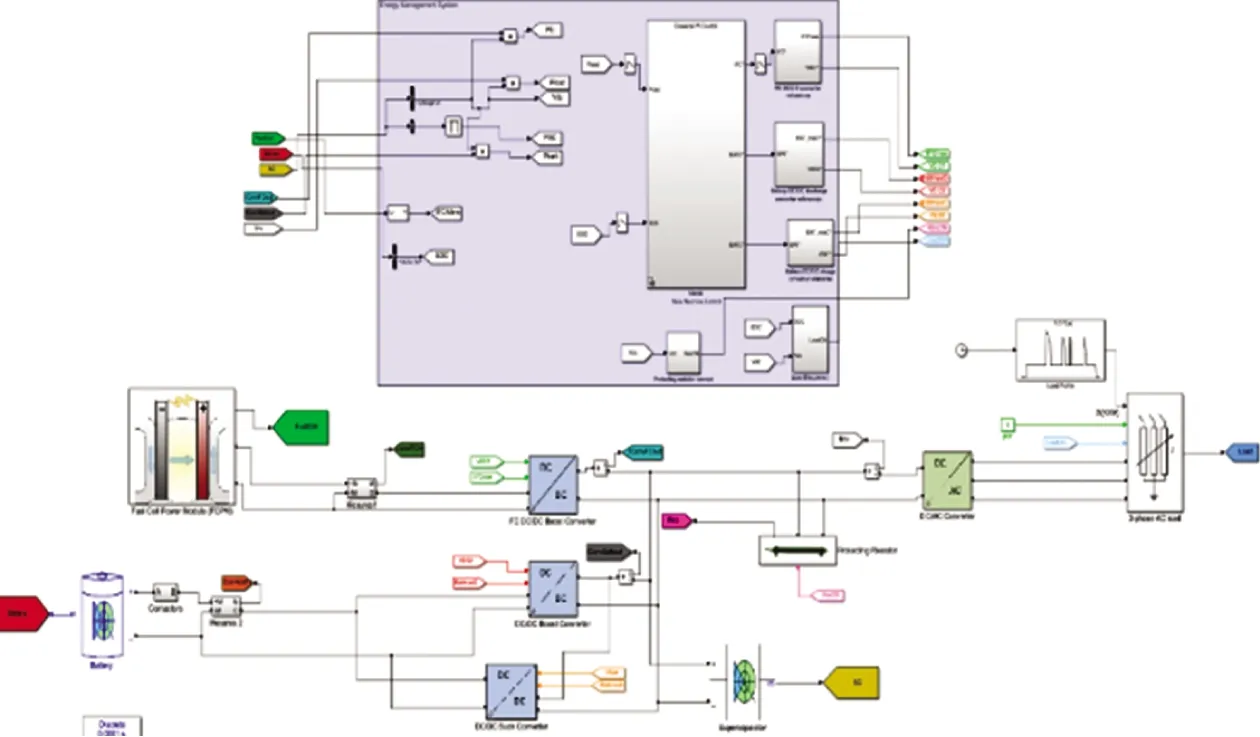
图1 Simulink能量仿真分析
2.2 工作模式设计
在本项目利用Simulink软件对微型自耕机的工作状态进行分析,得到3种不同的工作模式,如图2所示。
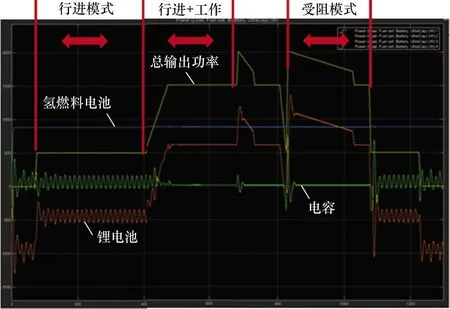
图2 Simulink工作状态模拟
(1)行进状态:自耕机进入大棚前,仅动力轮工作,旋刀模块待机(动力轮提供动力0.5 kW)。
(2)耕种状态:正常农业耕种,同时前进与耕种(自耕机正常工作功率1.5 kW)。
(3)受阻状态:遇结硬的土块,自耕机需要的额外瞬时功率(输出瞬时额外功率1.5 kW+0.5 kW)。
3种工作模式如下。
(1)行进模式:氢燃料电池组输出部分功率提供给动力轮正常行进500 W,同时向锂电池组充电,储存能量。
(2)耕种模式:微型自耕机平稳行进同时旋刀组以正常功率工作时,氢燃料电池组输出功率1.5 kW。
(3)受阻模式:微型自耕机作业受阻明显时,锂电池组同时额外输出功率,提高瞬时功率至2.0 kW。
综合上述对型微型自耕机的3种耕作模式分析,解决了机器起步的技术问题。
其操作技巧在于起步时需要小油门缓慢、平稳起步;进行模式中离合器分离的状态下进行第2能源充电,一般先用低挡工作,然后再用高挡工作;在进行耕地作业地头、地边作业时,要减慢速度,注意安全;转弯时要轻抬扶手,陷入泥中时也应轻抬扶手;农机充电时一定要熄火停机[6]。
2.3 混合动力微型自耕机控制设计
在本项目中采用氢能源混合动力,微型自耕机的整机设计能源控制遵循:动力控制器依据第1电压转换器以及第2电压转换器输出的电压值进行功率输出调配及充放电管理,如图3所示。

图3 控制设计
混合动力系统核心部件主要包括:1.8 kW燃料电池堆、主板控制器、离子电池、储氢瓶[7]。燃料电池为质子交换燃料电池,输出电压20~40 V,输出电流0~80 A,控制器为智能控制燃料电池和锂电池输出,内置锂电池充电模块、电源隔离模块、信号采集和控制模块、保护模块和通讯模块等。将燃料电池和锂电池组成混合动力单元,通过电压转换器对燃料电池和锂电池进行控制,使燃料电池输出满足负载需求的功率;控制锂电池时,根据母线电压的变化转换工作模式,以输出差额功率或吸收多余功率来维持母线电压在额定电压范围内,从而实时输出满足动力需求[8]。
动力源有如下特性:第1动力源具有高能量密度,为混合动力装置的稳定动力输出源,第2动力源具有高功率密度,第2动力源的动态响应时间优于第1动力源的动态响应时间。于是第2直流-直流转换器的输入端与第2动力源的输出端相连,输出端分别与动力控制器以及第2直流-交流转换器的输入端相连,第2直流-交流转换器的输出端与第2电机相连。
第2直流-直流(DC/DC)转换器采用双向DC/DC转换器[9],使得第2动力源可以在充电和放电两种模式下工作。同时,第1直流-直流转换器采用双向DC/DC转换器,还可以解决第1动力源无法自行起动的缺陷。当农机作业遇阻(遇到突发阻碍工况)时,由于第1动力源的功率输出调整有滞后时间,在该滞后时间内,负载端功率需求增加,但第1动力源的输出功率尚未调整到位,通过动力控制器控制第2动力源进行及时响应,补偿突发阻碍工况所需功率。
3 整机的模型设计
在本项目中,运用计算机设计软件Solidworks,对微型自耕机的各个零部件进行了三维建模并进行装配,机械设计的核心如图4所示。在整个项目中农机的核心机械零件主要包括:支架、第1动力源、第2动力源、行驶轮、旋刀组、扶手、第1传动轴、第2传动轴、动力控制器以及能量回收器、电池控制系统,如图5所示。其中,第1动力源、第2动力源、动力控制器以及能量回收器设置并固定在支架上,支架固定在行驶轮上,第1动力源和第2动力源分别设置在支架两侧,动力控制器以及能量回收器设置,在第1动力源和第2动力源之间,这样结构设置动力输出更加稳定,不受能量干扰控制较容易。
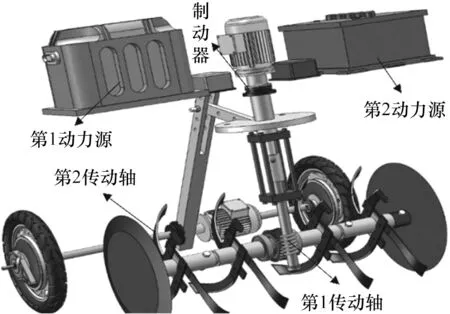
图4 核心零件局部放大
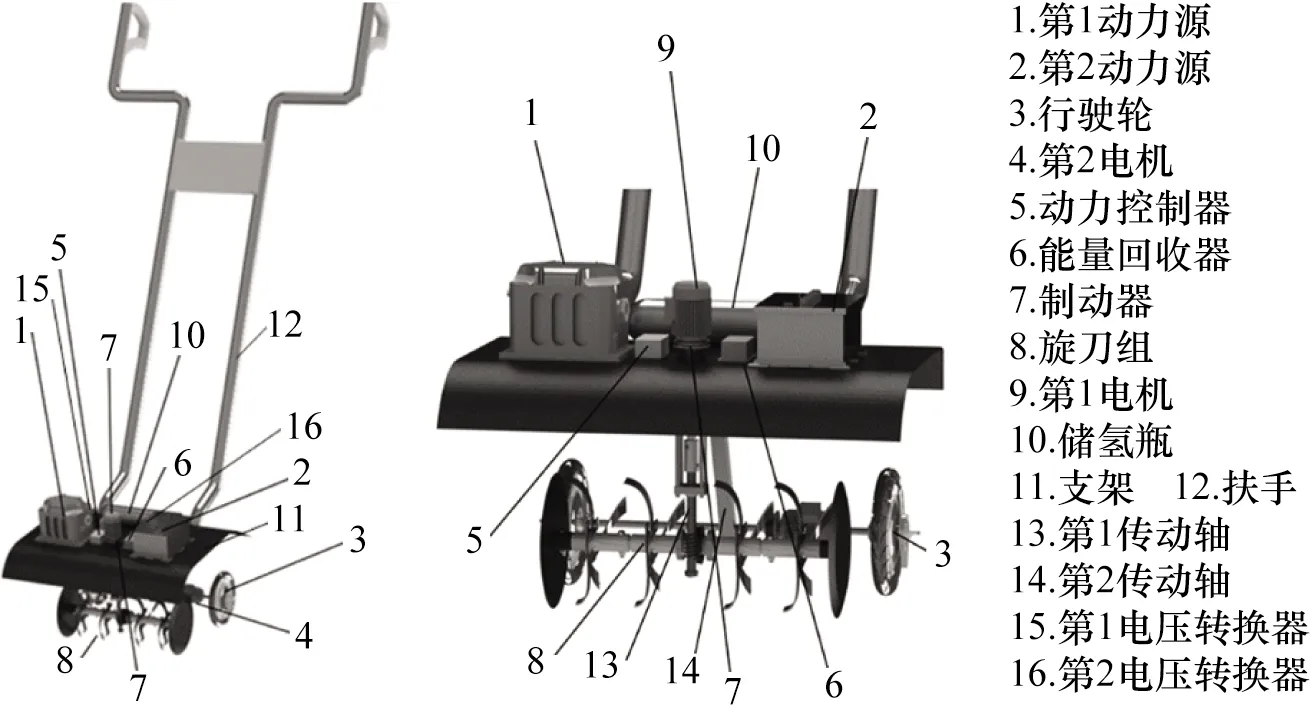
图5 自耕机整体结构
第1传动轴的一端分别与第1动力源和第2动力源相连,另一端与旋刀组相连,第2传动轴的一端分别与第1动力源和第2动力源相连,另一端与行驶轮相连;动力控制器分别与第1动力源、第2动力源、行驶轮以及旋刀组相连,能量回收器分别与行驶轮、旋刀组以及第2动力源相连;便于操控农机的扶手设置在支架上[10]。
按照上述的方法设置农机重要零件的分布及安装位置,有利于农机操作。利用第2动力源充放电的快速动态响应时间特性,实现农机输出功率的实时调节,可以有效提升农机运行的可靠性。
4 核心零件的设计
制动器的机械结构设计,电机动力输出端与输出轴链接,输出轴与制动器链接。其核心零件动力制器的设计,采用凹凸方式设计。制动器在设计中采用电磁阀控制,电磁阀控制方便,响应时间快,能源回收充分,制动器分别与第1电机以及控制器相连。制动控制器依据第1电压转换器以及第2电压转换器输出的电压值进行功率输出及充电管理。当农机突然制动时,制动器运行会产生制动能量,制动能量通过能量回收器和动力控制器,回收到第2动力源,将能量储存起来。
5 使用效果
如图6所示,初步运行结果显示能投入正常使用,适用于温室蔬菜大棚、蔬菜露地和果园的耕整地作业[11]。
6 结束语
本文通过采用混合动力系统,实现高能量密度和高功率密度的优势互补,可以提高农业机械动力系容量,提高农业机械续航能力。提出了氢燃料-锂电池混合动力系统、设计了电池综合管理系统,且在硬件上实现了完成组装及测试。测试表明微型自耕机的各项性能指标均已达到或超过国际标准要求,耕地效果满足农业的要求。通过能量回收模块和电池综合管理模块将制动能量自动回收到峰值瞬时动力输出模块,提高能量的利用效率。稳定动力输出模块提供农业机械的稳定功率需求,并具有能量来源稳定或快速的特点,满足农业生产对长续航的需求。本机整机质量为40 kg,操作灵活、转移方便、制造成本较低。
