基于UWB技术的矿用移动式读卡器设计
2021-07-24张立群
张立群
(1.煤炭科学技术研究院有限公司,北京 100013;2.煤炭资源高效开采与洁净利用国家重点实验室,北京 100013;3.北京市煤矿安全工程技术研究中心,北京 100013)
目前煤矿人员定位系统主要采用RFID、WIFI、ZigBee等区域定位技术,普遍存在着定位精度不足、传输距离短、漏卡、易受周围环境影响等问题[1]。这使得在矿难发生时,难以准确确定井下人员的位置来开展救援。随着智慧化矿山的建设,目前UWB精确人员定位系统已在逐步的替换传统区域定位系统。在国家安监局最新印发的AQ 6210—2020《煤矿井下人员定位系统通用技术条件》(送审稿)中,对精确人员定位系统的各项指标做了具体要求,其中系统应有便携式的读卡设备实现脱网定位功能作为强制性条款,使之在应急救援及系统维护等方面发挥重要作用。超宽带(Ultra Wide Band,UWB)技术是一种使用1 GHz以上频率带宽的无线载波通信技术,通过发送和接收纳秒级非正弦波窄脉冲来传输数据信号,具有很强的时间分辨力,可实现厘米级的精确定位[2],具有定位精度高、抗多径衰落能力强、穿透能力强、功耗低等优点,非常适合在复杂环境的井下实现精确定位。
鉴于此,设计了一种基于UWB技术和SDSTWR双边双程测距算法的矿用移动式读卡器,实现在较大范围内快速识别多张定位卡的精确位置和人员信息,对系统维护以及灾后开展科学救援,提高救援的时效性具有重要的现实意义,符合智慧矿山建设的发展趋势。
1 UWB精确测距原理
设计的移动式读卡器的精确测距原理基于到达时间(Time of Arrival,TOA)方法的SDS-TWR双边双程测距算法。该方法利用射频信号在空气传播时的速度已知,通过测量射频信号从定位卡到读卡器的飞行时间,从而确定2点间的距离。该方法几乎不受射频信号强度大幅变动的影响[3]。双边双程精确测距算法原理示意图如图1,整个过程分为2个阶段,发现阶段和测距阶段。

图1 双边双程精确测距算法原理示意图Fig.1 SDSTWR accurate ranging algorithm principle diagram
在发现阶段,定位卡定期向周围发送简短的入网消息(眨眼信号),并等待来自移动式读卡器的回应,并按照回应的信息进行初始配置,如时隙、唤醒周期等[4]。此后进入测距阶段,定位卡在t1时刻向移动读卡器发送含有该定位卡卡号和t1时间戳的起始消息帧,移动读卡器在t2时刻收到消息帧,延迟响应一定时间后,在t3时刻向该定位卡发送回复帧,定位卡在t4时刻收到回复帧并延迟响应一定时间后,在t5时刻再次给移动读卡器发送包含t1、t4、t5时间戳的终止消息帧,移动读卡器在t6时刻收到终止消息帧,即完成了1次测距过程。此过程中定位卡从发送起始帧到接收到回复帧的往返时间为t4-t1,期间的延迟响应时间为t3-t2,移动式读卡器从发送回复帧到接收到终止帧的往返时间为t6-t3,期间的延迟响应时间为t5-t4,总计2次往返,由此可计算出定位卡到移动式读卡器的飞行时间,进而由式(1)转换为2点间的距离D。

式中:C为电磁波在空气中的传播速度,约为3×108m/s。
采用双边双程(SDS-TWR)测距算法规避了定位卡和移动读卡器之间不同时钟时基带来的不确定性,两者无需精确的时钟同步,并能有效降低时钟频率漂移所带来的计时误差。
2 移动式读卡器硬件
移动式读卡器以ARM主控器STM32F429和UWB无线收发芯片DW1000为设计核心,整个电路设计为本质安全型,采用模块化结构,由UWB无线收发电路、触摸液晶屏显示电路、锂电池充电管理电路、锂电池电量计电路、电源电路、Flash存储电路、USB电路、按键输入电路等组成,实现在较大范围内快速识别多张定位卡的精确位置,检测定位卡的状态,查询定位卡人员的详细信息。移动式读卡器硬件总体结构图如图2。
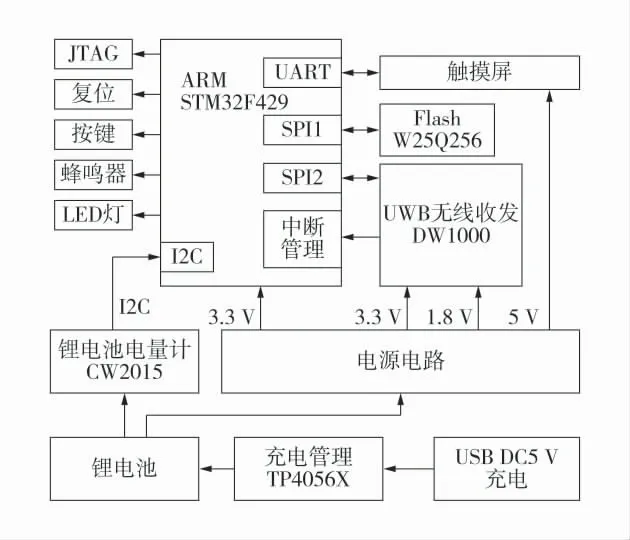
图2 移动式读卡器硬件总体结构图Fig.2 Hardware general structure diagram of portable card reader
ARM STM32F429是移动式读卡器的处理核心,由锂电池供电,电源适配器经USB口,通过TP4056X组成的充电电路对锂电池实现充电管理,CW2015锂电池电量计对电池进行采集,通过I2C将电池的剩余电量、剩余工作时间传给ARM,锂电池经电源电路进行电压变换后分成2部分,一部分升压到5 V给液晶触摸屏供电,另一部分经低压差LDO降压到+3.3 V及+1.8 V给ARM及相关外设和DW1000供电,ARM与UWB无线模块采用SPI通信来发送和接收UWB信号,计算出与定位卡的精确距离。ARM通过UART与触摸液晶屏通信,实时显示定位卡的测距信息及状态,查询定位卡对应人员的姓名、部门、照片等详细信息。Flash W25Q256用来存储DW1000的模式、参数等配置信息和定位卡的人员信息。
UWB无线收发电路以DW1000为核心,DW1000是一个集成度非常高的低功耗、单芯片CMOS射频收发器,兼容IEEE802.15.4-2011 UWB标准[5]。UWB无线收发电路如图3。
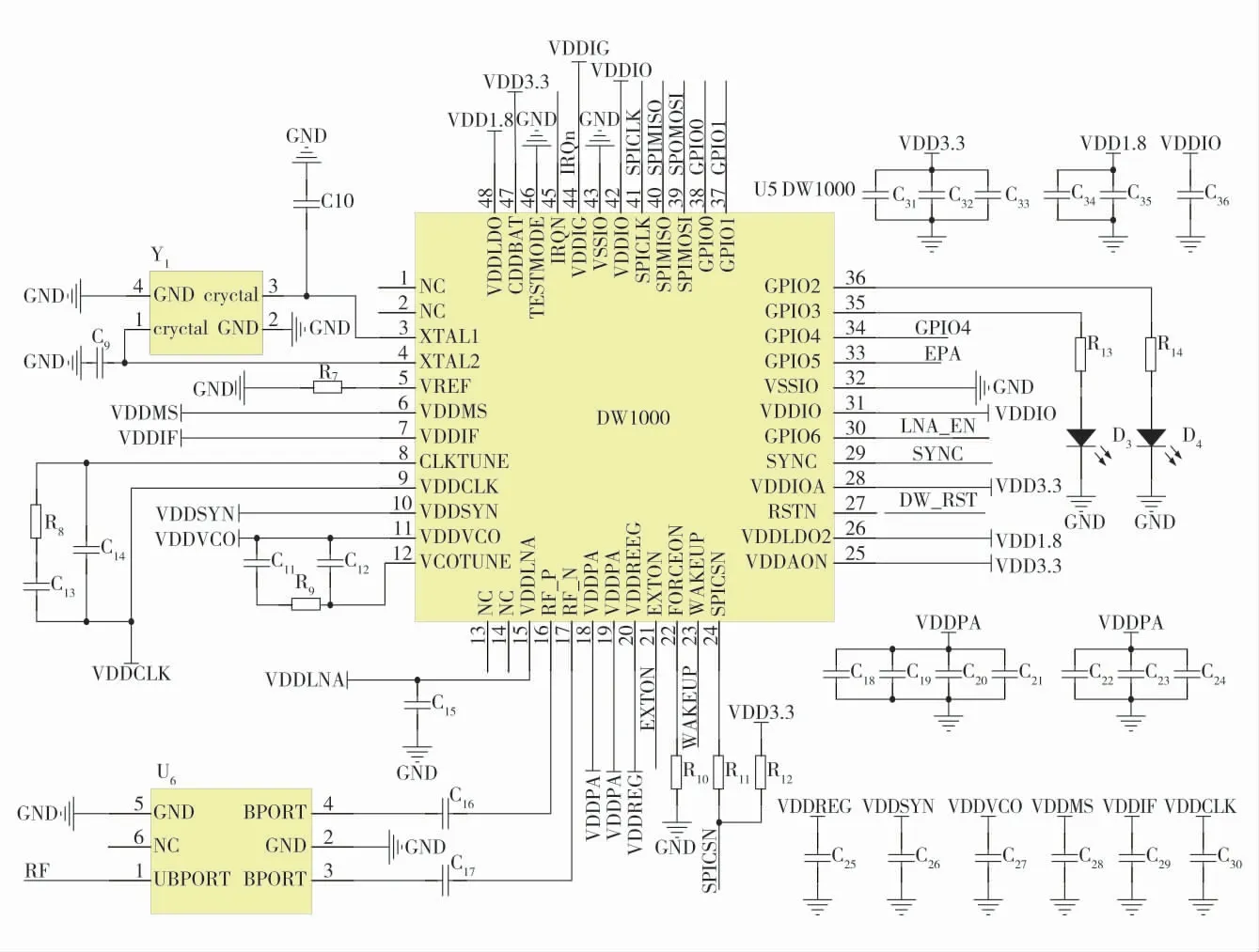
图3 UWB无线收发电路图Fig.3 UWB wireless transceiver circuit diagram
DW1000无线收发器采用严格的接口要求,从而确保可靠的电源、射频和定时信号。DW1000有8个电源引脚,每个引脚都需要0.1μF的去耦电容,发射机功放的外部电源引脚18脚、19脚VDDPA1、VDDPA2各需要0.1μF、10 pF、330 pF 3个去耦电容。电源电路提供的1.8 V电压给26脚VDDLDOD、48脚VDDLDOA以实现更高的功效。ARM通过SPI控制DW1000芯片进行数据收发,DW1000的差分引脚16脚RF_P和17脚RF_N输出UWB信号经巴伦转换器HHM1595A1,将差分信号转换成单端射频信号,经RF放大电路进行放大后,经天线发射出去[6],实现与定位卡测距的功能。
移动式读卡器作为一种手持便携式设备,对锂电池进行充电管理,延长电池使用寿命是设计的重要环节,锂电池充电管理的硬件设计电路图如图4。
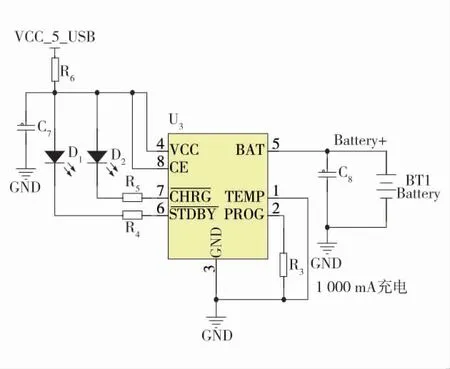
图4 锂电池充电管理电路图Fig.4 Lithium battery charging management circuit diagram
TP4056X是一款完整的单节锂离子电池采用恒定电流/恒定电压线性充电器[7],其内部具有防倒充电路,高达1 000 mA的可编程充电电流。TP4056X的第2引脚PROG接电阻R3,可通过R3的不同阻值对充电电流进行设定,TP4056X的7脚(CHRG)和6脚(STDBY)连接LED灯实现充电指示。正在充电状态,红灯D2亮,电池充满状态,绿灯D1亮。设计的充电电流为1 000 mA,为缩短充电时间,需增加0.4Ω的热耗散电阻R6。
电池的剩余电量是手持设备的重要参考,设计采用专用电量计芯片CW2015,锂电池电量计电路如图5。
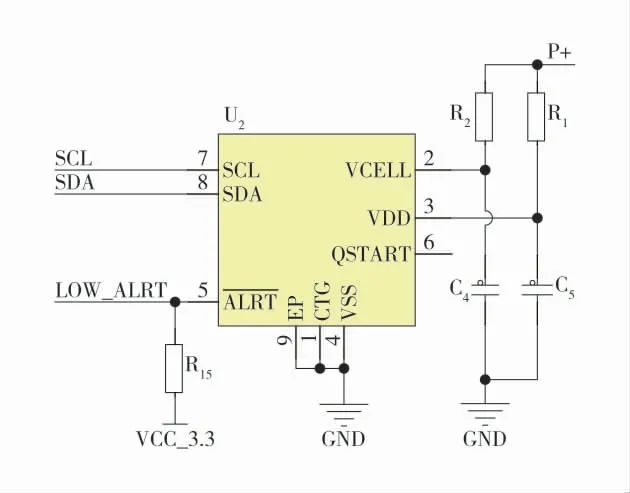
图5 锂电池电量计电路Fig.5 Lithium battery capacity measurement circuit diagram
CW2015是专门应用在手持及便携式设备的拥有小封装、低成本,无需电流校准和充放电学习的锂电池电量计[8]。CW2015的第2引脚VCELL持续监测电池在充电/放电状态下的电压,运行专利“Fast-Cali”电量计算法,结合电池建模信息,可准确计算电池电压、剩余电池电量、剩余工作时间,采用I2C总线与ARM通信,将电池信息传给ARM。当电池电压低时,5脚输出低电平,提示低压报警。
3 移动式读卡器软件
设计采用RT-Thread操作系统,移动式读卡器程序流程图如图6。

图6 移动式读卡器程序流程图Fig.6 Process flow chart of portable card reader
系统对ARM进行时钟、UART、SPI、I2C等硬件资源进行初始化及DW1000参数的配置,之后进入监听状态,等待定位卡广播发送的入网消息[9]。识别到定位卡后,通过SDS-TWR测距算法来计算定位卡与移动式读卡器之间的距离,并将定位卡的数量、卡号、电压、距离、人员信息以及读卡器的锂电池信息通过液晶屏显示出来。
4 试验测试
对移动式读卡器分别进行最大并发量、最大位移速度、最大距离与测距精度试验,来验证其性能。设计的移动式读卡机DM1000通信参数设置为110 kbps数据速率、16 MHz PRF、1 024个符号前导码[10]。设计的最大并发量为80张定位卡,最大位移速度为7 m/s。
最大位移速度与最大并发量试验,在空旷的道路,将80张定位卡放在车上,车以25 km/h匀速通过移动式读卡器的识别区,以满足最大并发数量的定位卡(80张)处于最大位移速度(7 m/s)的要求,测量20次,观察移动式读卡器能否正确读到全部定位卡。经20次测量,移动式读卡机全部正确读出定位卡,漏读率为0。因此,最大并发量为80张定位卡,最大位移速度为7 m/s,满足测试要求。
最大距离与测距精度试验,将最大并发量80张定位卡均匀设置在移动式读卡器定位区内,在空旷的道路上,定位卡分别放在实际50、100、210、300、400、52.3、154.6、216.5、313.7、379.8 m,总计5个整数点和5个非整数点的位置,每个位置放8张卡,移动式读卡器测量所有定位卡位置,并计算所有定位卡测量位置与实际位置的差值,每个位置取100条数据,其最大值为最大静态误差。
经试验,在DW1000的此参数配置下,移动式读卡器可实现最大静态误差不大于30 cm,最远距离达到400 m,满足矿方对移动式读卡器的精确定位要求。
5 结语
分析了UWB通信技术和SDSTWR双边双程测距算法实现精确测距的原理。以主控ARM芯片STM32F429和UWB无线收发芯片DW1000为核心,设计了一种基于UWB技术和SDS-TWR测距算法的手持移动式读卡器。测试结果表明,该移动式读卡器最大静态测距误差不大于0.3 m,有效测距距离400 m,最大并发识别数量80张定位卡,最大位移速度不小于7 m/s,满足煤矿对精确人员定位系统维护以及应急救援中对遇难人员精准定位要求。
