基于PSD的非接触式二维动态角度精密测量系统
2021-07-23董文博肖爱民于梦溪葛文奇何建国
李 波,董文博,3,肖爱民,于梦溪,葛文奇,何建国
(1.中国科学院空间应用工程与技术中心,北京 100094;2.中国科学院大学,北京 101408;3.中国科学院太空应用重点实验室,北京 100094;中国科学院空天信息研究院,北京 100094)
1 引 言
非接触式角度测量广泛用于机械制造、精密测量[1]、运动控制、航空航天[2]等领域。在一种用于二维高速摆镜的研发和测试系统中,要实现范围±10°、精度0.001°、采样速率大于80 kHz量级的角度动态测量指标。其关键问题在于系统不仅需要能测量大范围的二维角度,而且在大角度范围区间内要满足0.001°的精度要求,同时,系统需要实现高速率的角度测量。目前,尚没有成熟的方案可以满足以上的要求,必须进行创新设计,实现基于光电测量和视觉测量的大范围高精度高速率的动态角度测量。
通过调研,角度的测量技术已经发展的较为完备。角度的测量可分为静态角度测量和动态角度测量两种[3]。传统的角度测量方法主要包括机械式和电磁式,虽然应用于很多场合,但是大部分都是接触式测量,测量精度也受到限制。随着光电技术的发展,传统光学方法与光电接收器件相结合的光电测角方法,由于其精度高、可靠性高、实现简单、体积小、质量轻、可维护性好,在测角领域中得到了广泛的应用[4]。动态光电测量一般有以下几种方式:基于PSD的测量、基于四象限的测量和基于CCD的测量。
2019年,上海科学院[5]采用PSD测量,指标可以达到±2°范围内0.02°左右精度,频率达到200 Hz,其应用也是用于类似场合。文献[6]中等利用二维PSD激光自准直原理动态测量三自由度转角,结果表明,测量范围为±1°,响应频率为4 kHz,静态测试误差为0.35′,动态测试误差为0.36′。2016年,文献[7]中利用PSD实现了测量范围±1200 arcsec,分辨率达到0.473 %和0.632 %,其只测量了静态精度,且没有频率指标。
2018年,中科院空间应用中心,文献[8]中对空间运动体的六自由度测量,达到角度范围2.5°,精度0.1°,速率250 Hz的水平。2017年,中科院空间应用中心公开了《六自由度位姿测量方法及装置》的专利。其他近年也未发现专门用于激光雷达二维转角测量的的专利或论文。
浙江大学在文献[9]中采用四象限方法进行角度测量,测量范围±500 arcsec,分辨率达到0.1 arcsec。2005年、2006年,日本Niigata大学Takamasa Suzuk[10-11],采用和浙江大学论文类似的方法。
文献[12]中提出了一种基于CCD成像的检测光学系统测角精度的方法。其精度达到亚像素级,标定误差小于0.0167°。文献[13]利用特定的二维衍射光栅贴附于被测平面上,CCD得到平面倾角变化前后的衍射图像,通过条纹分析得到被测面倾角的变化,其测量准确度可达0.06°,可测量20°范围内的二维平面倾角。
总之,四象限的测量可以实现大范围二维角度测量,但是四象限测量要求激光器为圆形光斑,而PSD测量对光斑无严格要求,其只与光的能量中心位置有关,且四象限探测器象限之间存在死区,而PSD光敏面无需分割,不存在死区,可实现连续的光斑位置测量,位置分辨率高。CCD可以实现高精度角度测量,但是CCD测量需要逐帧采集图像,而系统需要达到至少80KHz的采样速率,显然CCD无法实时采集和处理如此庞大数据量的图像。
因此,四象限探测器可以高精度地反映光斑中心的位置变化,常用于定位对准;CCD测量适用于在采样速率要求较低的场合实现高精度的动态角度测量。而需要实现大范围的连续角度测量,且满足高速率高精度的要求,二维PSD是最合适的探测元件。而过去的二维PSD的测量虽然能够达到较高的速率,但其测量精度有待提高。
本课题设计了创新方法,采用PSD方式实现了大动态范围的高精度角度测量。首先,采用高精度的激光器和PSD,保证系统精度,PSD大面积的光敏面保证能测量大角度范围,通过光路聚焦方法,提高PSD敏感精度;其次采用FPGA和高速AD采集板实现了125 kHz高速数据采样,再利用数字滤波的方法保证300 Hz工作频率达到0.001°的低噪声,满足随机误差指标;对于任何测量系统都不可避免存在系统误差,本文用极高精度的位移台对测量系统进行±10°连续的矩形角度范围进行标定,采用二维插值算法,实现了在±10°的连续角度范围内,系统误差都能满足精度要求。
2 系统设计和工作原理
测量系统主要由光机系统、电路系统组成,下面详细描述了角度测量系统的原理和工程实现。
2.1 精密光机系统设计
如图1所示,为系统的光路结构,光路系统主要由激光器、PSD、衰减片、滤光片以及外部的反射镜(或自标定镜)组成。
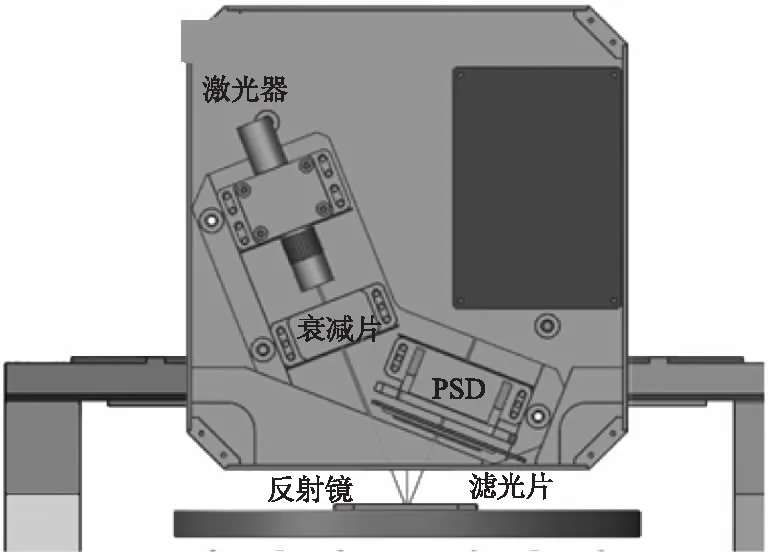
图1 光路系统
激光器的稳定性对系统的精度影响较大,应选择漂移小且光源稳定的激光器,通过比较,选用美国Coherent公司的STR-655-1-CW-P-D01型激光器,其发出波段655 nm的红光,功率为1 mW,其光束稳定性小于10 μrad/℃,发散角小于3 mrad。实际测试中,为了避免杂光和振动造成的影响,需加上遮光外罩并在隔振平台上测试。
PSD作为光电探测器件,主要用于精确的测量其上光斑的位置。PSD需要具有二维位移的检测能力,光谱需与激光器适应,且为了保证±10°的大角度测量,其检测面积需要符合要求。通过对比,选择Sitek公司2L45_SU24型PSD,其为双面型PSD,光敏面积45 mm×45 mm,温度漂移为40 ppm/℃,线性度±0.3 %,响应灵敏度为0.4 A/W。该PSD是目前市场上靶面最大的高精度PSD,原则上,PSD需要对其非线性进行校正,但选用的PSD非线性误差较小,可不必进行非线性校正。
激光器的输出能量较大,不能直接照射到PSD探测器上,需要加入衰减片。衰减片选用Thorlabs公司型号NE510B的吸收型中性密度产品,其只会造成一定的散射,对光斑影响小。为了防止近红外光线等对系统造成杂光干扰,需选用合适的滤光片,滤光片选择吸收衰减型滤光片,通过比较分析,考虑选用655±10~20 nm窄带滤光片。
经过光路计算,反射镜中心距PSD平面为45 mm,激光入射角为20°,可保证反射镜±10°转动,光斑都能在PSD的靶面上。激光器、滤光片、衰减片和PSD安装在一块高精度的平板上,采用固定销的方式保证安装精度。衰减片贴出光口安装,滤光片安装于PSD前,结构设计紧贴,不易受杂光的影响。激光器、PSD采用定制加工的夹具,保证平面度、粗糙度以及孔的尺寸公差。
图2为测试系统的工装图,其中,测量工装主要用于安装和测试反射镜,为了便于系统的标定,其可以更换为包含六自由度位移台的标定工装。标定工装的反射镜安装位置必须与测量工装一致,且需要通过设置位移台的参数,保证位移台带动反射镜的运动能准确反映测量工装中反射镜的运动,最终经过标定后的系统能准确应用于实际的测量工装中。
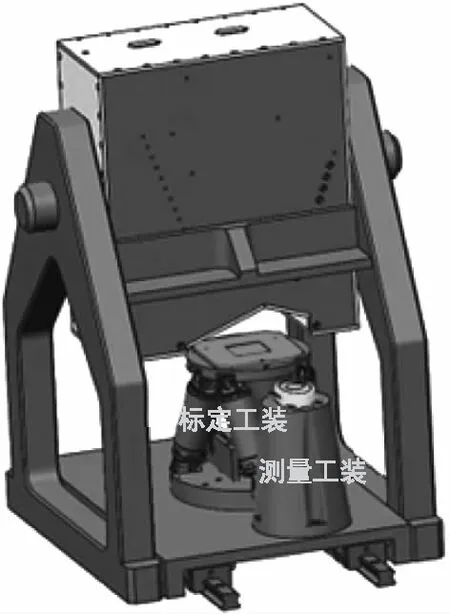
图2 工装图
为了保证标定的精度,需要采用高精度的六自由度位移台。选择PI公司的H-811.I2六自由度平台。其在二维旋转角度的范围和精度如表1所示,二维转角均可达到±10°,最小位移和重复精度均在μrad 数量级,可以满足标定的范围和精度需求。
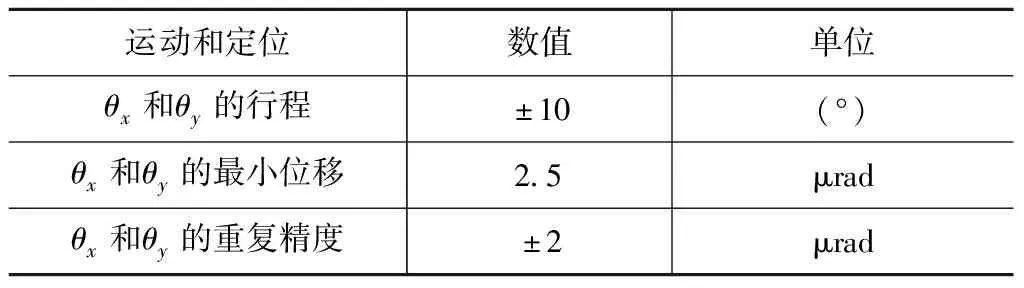
表1 位移台参数
2.2 高带宽电路系统设计
电路系统主要包括PSD信号处理子系统、数据传输子系统和数据处理子系统,电路原理如图3所示。

图3 电路原理
PSD信号处理子系统主要包含PSD器件、调理芯片及AD采集电路。数据传输子系统主要包含FPGA数据传输板,其与PSD的AD采集电路连接,可以实现AD的采集和发送控制,通过以太网与上位机连接,可以实现高速数据传输功能,同时FPGA还和反射镜进行电源和数据连接,可以采集反射镜自身的外部电压值,将电压值和反射镜角度值对应存储,一起传输给上位机。数据处理子系统包含上位机的数据采集、滤波、二维角度计算、系统标定等功能。
为了满足高速采样的需要,AD采集板选用美国TI公司的ADS1258IRTCR型器件,24 Bit字长,采样速率可达到125 ksps。主控芯片使用Xilinx公司的Zynq7000系列的芯片,型号为XC7Z020-2CLG400I,400个引脚的FBGA封装,芯片的处理器系统集成了两个ARM CortexTM-A9处理器,实现高速的数据处理。
3 二维角度解算和精密标定方法
如图4所示,为系统采集到的PSD四路数字电压信号通过一系列计算得到精密的二维角度值的流程图。

图4 精密角度计算流程
选择PSD靶面的中心作为坐标原点,四路数字电压信号为Vx1、Vx2、Vy1、Vy2,Lx、Ly为两个方向光敏面的长度,入射到PSD上的光斑二维位移为:
(1)
根据系统的光路建立相应的数学模型,得到光斑二维位移与反射镜的二维旋转角度的函数关系。此时得到的角度值误差往往偏大,需要对其滤波和校正,以降低其随机误差和系统误差,最终得到精确的角度测量值。
3.1 二维位移与角度关系求解
如图5所示,为系统的光路模型简图,世界坐标系设置于平面镜中心。反射镜处于零位时,光线以20°入射角照射到反射镜的中心位置,经反射后垂直打在PSD靶面上。
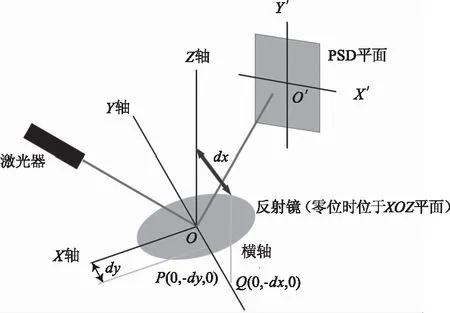
图5 光路示意图
由于在实际测试中,反射镜的两个旋转轴并不通过反射镜的中心,而是存在一定的偏移dx和dy,计算出的角度与位移关系是二维非线性耦合的关系,即θx=f(X,Y),θy=g(X,Y),求解相应的函数解析解较困难,本文将根据实际的光路参数得到相应的数值解,并通过拟合的方法得到f和g的近似解。

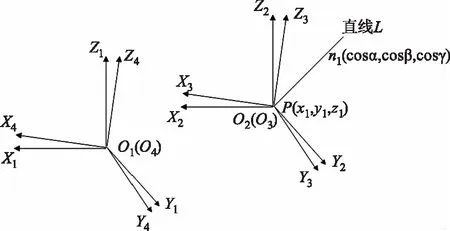
图6 坐标系变换
那么坐标系O1-X1Y1Z1到坐标系O4-X4Y4Z4的变换矩阵可表示为:
(2)
其中,T3×3为坐标系绕经过其原点的直线旋转θ角的变换矩阵:
(3)
根据式(2)和(3)可求得反射镜绕横轴和纵轴旋转θx和θy后的平面方程:
(4)
利用以下两个约束条件可求解反射光线并得到PSD上的二维位移:
①入射角等于反射角;
②入射光线方向向量、反射镜法向量、反射光线方向向量共面。
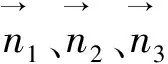
如图 7(a)所示,为一系列(θx,θy)构成的面点阵,计算得到相应光斑位移的数值解(X,Y)构成的点阵如图7(b)所示。
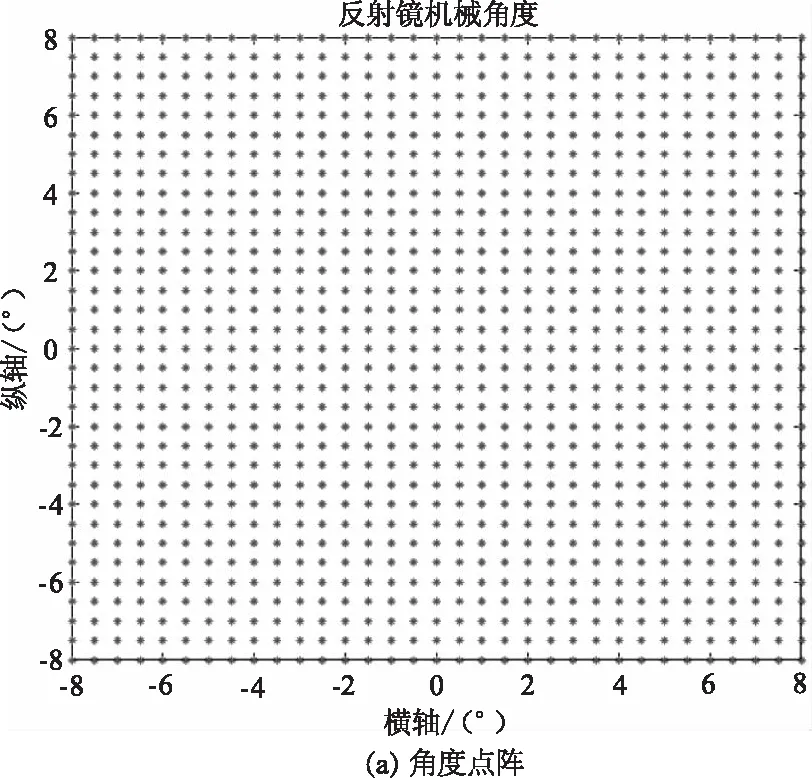
图7 位移和角度关系
采用二次多项式拟合的方法,利用得到的一系列对应的数值解,拟合θx=f(X,Y),θy=g(X,Y),最终得到以下关系:
只要计算出PSD输出的二维坐标,根据上面的关系式即可得到反射镜的二维转角。
3.2 二维角度全局标定方法
由光斑位移计算出的角度值受光学和机械安装等因素的影响,存在一定的误差,需进行角度标定。标定是得到一组实际测量的角度与理论角度之间的对应,对实际测量的角度值进行校正,使测量值经过校正后得到的估计值与理论值接近,以降低系统误差。
标定设备为六自由度精密位移台,以位移台角度作为理论角度值,测量系统输出的角度值作为测量值,标定时位移台的移动方式如图8所示,采用“弓”型扫描的方式直至遍历所有的需标定角度值,位移台扫描前,需设置位移台的位置参数和两个转轴的参数,保证其与测量工装的反射镜参数一致性。位移台处于每一角度位置时都需采集一定量的测量角度数据,将采集的角度数据求平均值作为该位置的角度测量值。

图8 位移台移动过程
角度校正算法可采用数值拟合、插值以及神经网络等方法[14]。由于PSD、光源等非线性因素的影响,采用拟合的方法系统误差较大,且非线性拟合关系难以确定,神经网络的方法可以解决非线性的问题,但模型相对复杂,容易造成过拟合,插值的方法利用了被插值点与其临近点相关性较大的原理,插值后的结果的系统误差较小,且模型相对简单,本文采用的方法为线性插值的方法。
如图9所示,对处于四边形ABCD中的二维点X进行插值操作,X的测量值(x,y)满足以下关系:
图9 四边形插值
x=xA+(xB-xA)·u+(xD-xA)·v+(xA-xB+xc-xD))·u·v
y=yA+(yB-yA)·u+(yD-yA)·v+(yA-yB+yc-yD))·u·v
其中,xA~xD,yA~yD均为相应点的测量值,u和v为待求插值系数。由以上两个方程可解出u和v(选择[0,1]区间的解),X点的插值估计为:
X=XA+(XB-XA)·u+(XD-XA)·v+(XA-XB+Xc-XD))·u·v
Y=YA+(YB-YA)·u+(YD-YA)·v+(YA-YB+Yc-YD))·u·v
其中,XA~XD,YA~YD均为相应点的理论值,将计算得到的u和v带入上式即可求出点X的两个二维插值估计。
4 实验测试和分析
本文所设计的基于PSD的二维动态角度高精密测量系统的整体结构如图10所示。整个设备呈垂直放置,反射镜放置在精密的位移台上,可进行标定测试,激光器、PSD、FPGA采集板以及AD转换芯片集成于黑箱内。采集到的数据在上位机用户界面上显示,软件同时集成标定功能,下面将对系统的指标进行实验测试。
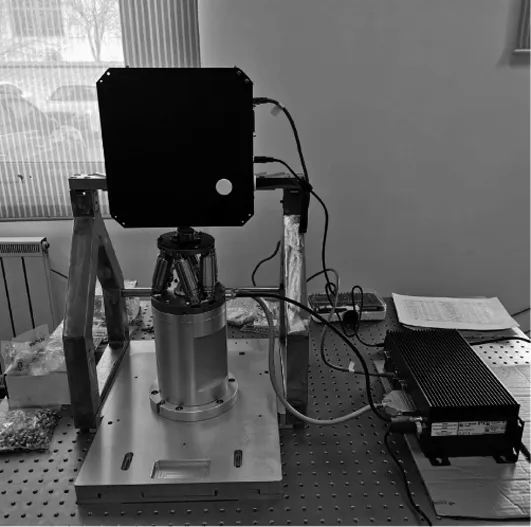
图10 测量系统实物图
4.1 静态测试实验
静态测试时,设备上电,反射镜转动到某一位置后保持静止状态,激光器和PSD等器件经安装后位置固定,记录一段时间后系统测量的角度值(经过数字滤波后)的漂移,其对应散点如图11所示,表2为对应的角度漂移。

图11 散点图
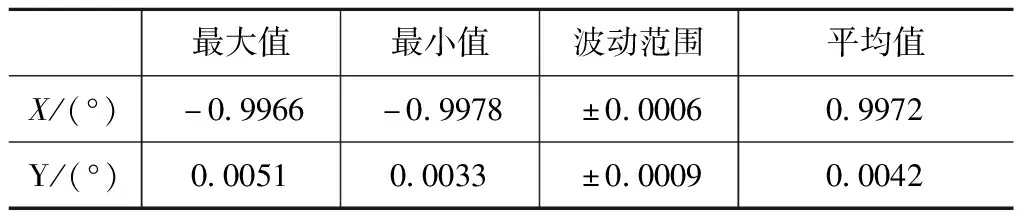
表2 角度漂移
由表2可以看出,X和Y两个方向的波动范围均在±0.001°以内,可以达到精度指标。反射镜放置于六自由度位移台上,控制位移台带动反射镜移动到不同的(U,V)角度位置,在相应的位置分别进行静态测量,得到X和Y方向的角度波动如表3所示。
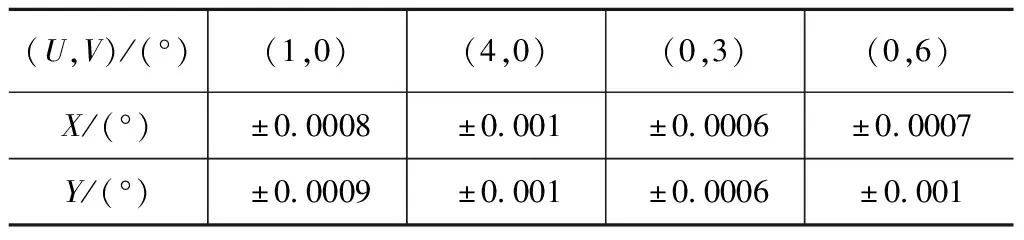
表3 不同位置的角度波动
由表3可以看出,在测试的几个不同角度位置,角度的漂移均在±0.001°以内,满足相应的精度指标。并且,在大角度位置(0,6),其角度漂移并未呈现明显的增加趋势,表明测量系统在大的角度范围内也可以保证较高的精度。
4.2 动态测试实验
动态测试时,反射镜两个转轴以一定的频率转动,X轴频率设置为320 Hz,Y轴频率设置为10 Hz,采样频率为125 kHz,记录并保存一段时间内系统计算出的二维角度数据,经软件绘制出二维角度的时域曲线如图12所示。
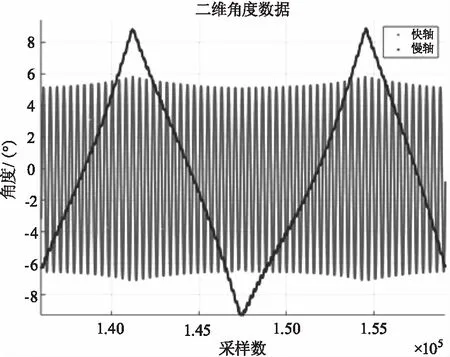
图12 时域图
从图12中可以看出,快轴每个周期采样约390个点,慢轴每个周期采样约12500个点,间接表明系统的采样速率达到了125 kHz的水平。
以快轴为例,采用500 Hz带宽的数字低通滤波器(切比雪夫滤波器)对角度数据滤波,尽量保证低频信号部分的频谱不衰减,如图13所示为滤波前后信号的频谱,从图中可以看出,低频信号段基本无衰减。

图13 频域图
滤波前后某一周期内的时域曲线如图14所示,经过数字滤波后,正弦曲线趋于平滑,角度的随机误差减小,信号的幅值无明显衰减,信号产生约25个采样点的相位延迟,需在后期进行数据处理。
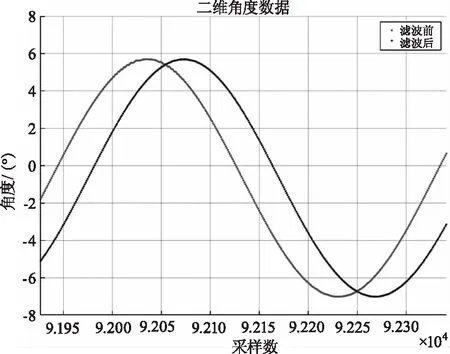
图14 相位延迟
4.3 线性度实验
反射镜置于在精密位移台上,保持Y轴静止不动,X轴每次以0.5°的步长转动,保存转动到每一位置的系统测量值(未标定)和位移台的精确角度值,采集29组对应数据,得到的曲线如图15所示,计算得到其非线性误差为0.165 %。
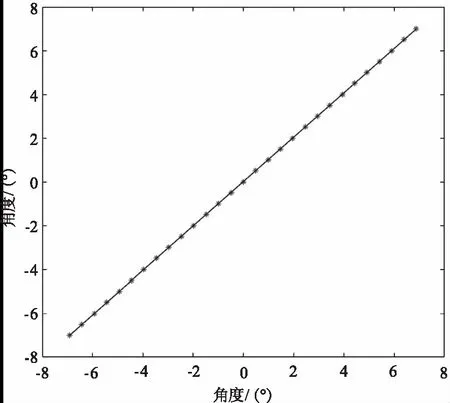
图15 X轴非线性度
同理,保持X轴静止不动,Y轴每次以0.5°的步长转动,保存相应的测量值和位移台的角度值,采集29组对应数据,得到的曲线如图16所示,计算得到其非线性误差为0.404 %。X和Y两个轴的非线性误差都在较小的量级,且X方向的线性度较Y方向好。
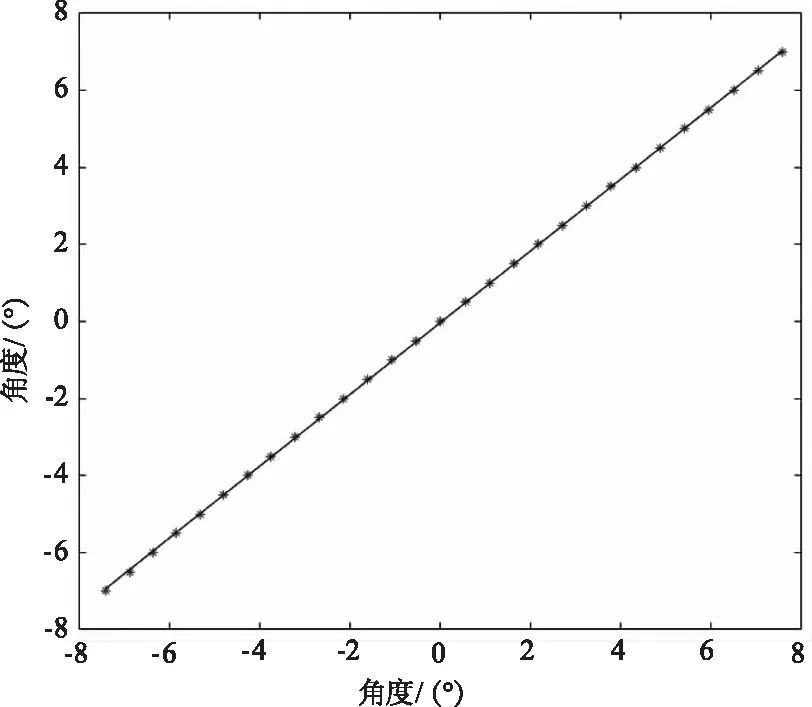
图16 Y轴非线性度
4.4 标定实验
下面对比了采用多项式拟合的方法和线性插值两种方法的标定结果。
4.4.1 多项式拟合方法
采用三次多项式拟合对测量值进行校正。通过最小二乘法估计求出拟合参数即可。
如表4所示,为经过校正后的误差结果,X和Y两个方向标定后的最大误差均达到0.02°,无法满足精度要求。
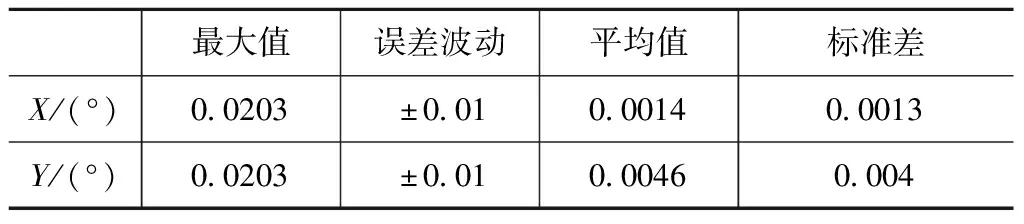
表4 标定误差
4.4.2 插值方法
插值法与拟合法的主要区别在于拟合法考虑的是整体的数据特性,而插值法考虑局部数据的相关性。如图17(a)所示,校正前测量角度值与理论的角度值存在较大的偏差,如图17(b)所示,经过插值校正后,插值估计值均与理论值近似重合。
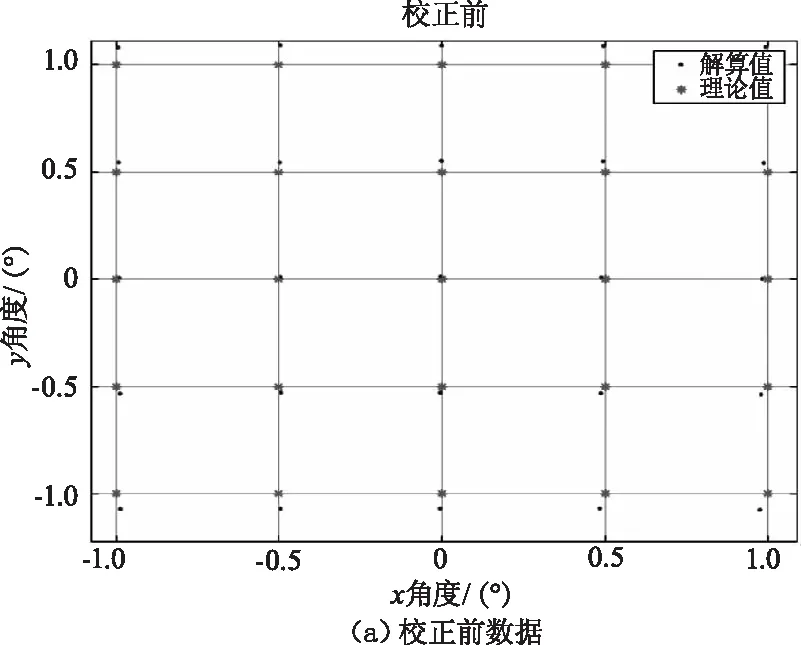
图17 标定结果
如图18所示,为经过校正后的误差分布结果,其中颜色深浅表征相应位置误差的大小,经过校正后,X轴最大误差约0.007°,平均误差约0.0009°,Y轴最大误差0.0065°,平均误差0.0017°,平均误差满足0.001°精度指标。
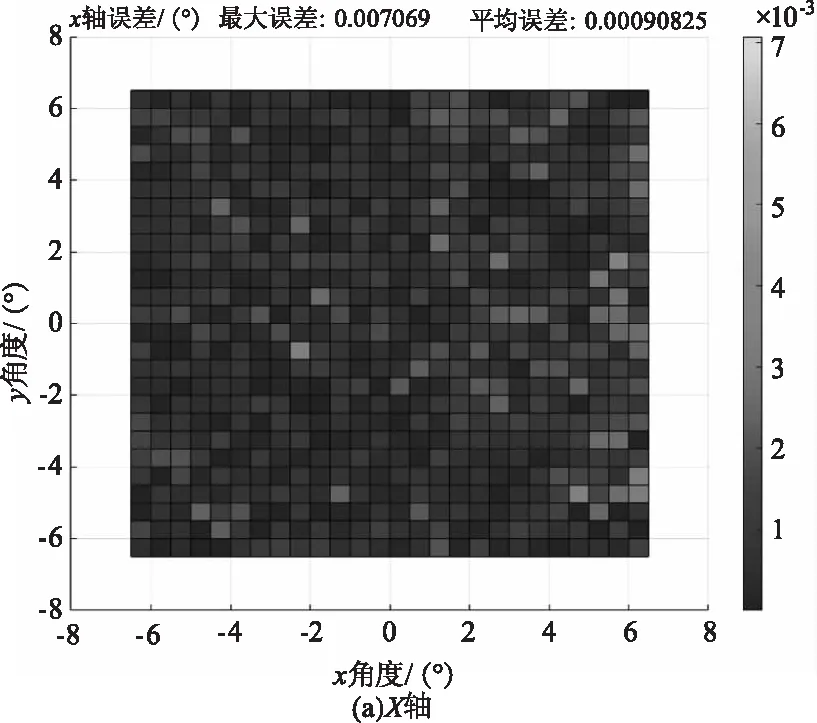
图18 误差分布图
5 结 论
设计了一台可以进行非接触式的二维动态角度精密测量的设备。设备采用二维PSD和高速数据采集系统的方案可以精确的给出二维反射镜的两个角度值,并采用插值的方式对系统进行标定,实现高精度测量。系统达到±10°的范围,随机噪声0.001°,系统误差标定后最大0.007°,同时采样速度达到125 kHz的水平,具有300 Hz以上的响应带宽,处于行业较高水平。该高精度动态角度测量设备可以用于高速二维振镜的测试,还可以推广到航天、交通、工业、精密仪器等应用中。
