TBM掘进岩渣图像分割与识别方法研究
2021-07-23李青蔚杜立杰杨亚磊刘雷涛刘金辉
李青蔚,杜立杰,*,杨亚磊,刘雷涛,蔡 龙,刘金辉
(1.石家庄铁道大学,河北 石家庄 050043;2.中铁十九局集团第一工程有限公司,辽宁 辽阳 111000)
0 引言
近年来,全断面岩石隧道掘进机(tunnel boring machine,TBM)因其施工速度快、安全环保等优点,在铁路隧道、公路隧道、水利水电、地铁等工程建设中得以应用及快速发展,例如:川藏铁路建设计划采用18台以上的TBM进行施工。然而,TBM施工受地质条件影响较大,且在掘进过程中受机械结构的限制无法直接观察到掌子面的围岩情况。在遭遇不良地质时,因不能及时调整掘进参数和掘进策略,导致TBM被卡、被困的情况时有发生,这就需要多方面加强施工前方地质的超前预报及在掘岩体的识别预警。若能在TBM掘进过程中持续掌握掌子面围岩条件的实时变化,对不良地质进行及时预警,将会极大地降低施工风险。岩渣作为TBM切割岩体的直接产物,其形态最能及时反映地质条件变化,所以根据岩渣的变化可以对掌子面的围岩条件进行实时判断和预警。
目前关于TBM掘进岩渣的研究主要有2个方面:
1)岩渣粒径分布规律与TBM破岩效率的研究。陈文莉等[1]和宋克志等[2]通过理论分布模型对岩渣粒径的分布曲线进行描述,发现TBM岩渣粒径分布规律均符合Rosin-Rammler函数;Aydin等[3]和闫长斌等[4]对TBM岩渣粒径分布规律与TBM破岩效率之间的关系进行了研究,指出TBM破岩效率随岩渣粗糙度指数的减小而降低;文献[5-6]基于现场掘进试验和岩片筛分试验研究了TBM运行参数和破岩效率之间的关系;龚秋明等[7]采用室内线性切割试验,探讨了不同滚刀间距和贯入度下的岩片分布规律及其与TBM破岩效率的关系。
2)基于岩渣判断围岩类别的研究[8-10]。将岩渣作为判断围岩条件的因素之一,总结岩渣与围岩类别的对应关系,根据对应关系预测前方的岩体条件。黄祥志[11]和宋志成[12]把数学理论及方法引入到岩渣与围岩类别的判断中,将围岩评价指标标准化,使围岩等级评价更加客观、准确。
随着计算机技术和图像识别技术的发展,岩渣研究有了新的方向。Rispoli等[13]基于图像分析方法确定了岩渣粒径分布规律与TBM性能参数、岩体参数之间的关系。Jeong等[14]通过图像处理和筛分试验2种方法对岩渣粒径分布规律进行分析,认为筛分试验是分析岩渣粒径分布规律的最佳方法。黄科[15]以深度学习的方式建立岩渣自动识别模型,将岩渣区分为有风险和无风险2类,证明了将图像识别技术应用到岩渣识别中的可行性。甘章泽等[16]提出一种消除无效背景的改进标记分水岭岩渣图像分割算法,并采用最小矩形拟合法测量岩渣的长、短轴,实现了岩渣尺寸的快速测量,但该算法处理的岩渣图像较为简单。Gong等[17]基于室内模拟试验开发了一套辅助TBM智能化施工的渣片分析系统;通过对皮带机上岩渣的图像、质量流量和体积流量实时采集与分析,实现对掌子面岩体状态的实时预测和失稳预警;该系统利用深度学习算法实现岩渣图像的分割与特征提取,但在某些情况下该算法的准确性还需不断提高。
上述文献中TBM岩渣的分析以筛分试验和经验总结为主,多为研究渣片与破岩效率的对应关系或直接人工观察岩渣再分析总结其对应围岩条件,而不是围岩在线识别预警,无法为智能掘进提供依据。因此,图像识别技术刚刚开始应用到岩渣分析中,提出的方法和模型还不完善,还需后续不断研究探索。为实现TBM不良地质实时预警和智能掘进,本文提出一种新的TBM岩渣图像分割与识别方法。根据施工现场采集的岩渣图像特点,采用改进的标记分水岭算法对岩渣图像进行分割,并对图像分割结果进行岩渣特征提取与分类,实现TBM岩渣的自动分析与识别。
1 TBM掘进岩渣特征分析
1.1 依托工程概况
本文以浙江台州朱溪水库引水工程TBM施工隧洞为依托,并结合其他工程TBM掘进岩渣情况进行研究。朱溪水库引水工程上游段输水隧洞全长22.501 km,采用TBM与钻爆法联合施工。TBM施工洞段长15.94 km,采用1台敞开式TBM分2段进行,其中,TBM-1段长度为4 792 m(桩号K17+499~K22+291);TBM-2段长度为11 147 m(桩号K5+697~K16+844)。该敞开式TBM的主要技术参数如表1所示,刀盘刀具布置如图1所示。

表1 敞开式TBM的主要技术参数Table 1 Main technical parameters of open TBM

图1 刀盘刀具布置(单位:mm)Fig.1 Cutter arrangement on cutterhead (unit:mm)
隧洞围岩以角砾熔结凝灰岩为主,新鲜岩石块状坚硬,单轴抗压强度较高。新鲜岩石岩样天然状态下抗压强度一般为68.8~241.4 MPa;饱和状态下抗压强度一般为65.4~240.1 MPa;局部岩体强度更高。隧洞主要埋深为150~600 m,最大可达800 m。
本工程依据GB 50287—2016《水力发电工程地质勘察规范》[18]对围岩类别进行划分,其中,Ⅱ类围岩占比53%,Ⅲ类占比22%,Ⅳ~Ⅴ类占比25%。隧洞沿线围岩以Ⅱ~Ⅲ类为主,整体围岩较为稳定;断层通过段围岩以Ⅳ~Ⅴ类为主,岩体不稳定,易发生坍塌。
1.2 岩渣特征与岩体完整程度现场分析
不同工程对应的地质条件不同,但TBM掘进的岩渣与岩体条件具有一定相关性。本文基于依托工程现场分析,选取桩号为K20+623~+410里程的完整岩体、K20+322~+190里程的较完整岩体、K20+362~+322里程的较破碎岩体和K20+376~+362里程的破碎岩体等,对岩渣和岩体完整程度的对应关系基本规律进行总结,如表2所示。同时,结合辽西北供水工程、新疆EH工程等现场收集的岩渣图像进行分析,给出不同岩体完整程度下的典型渣料如图2所示。
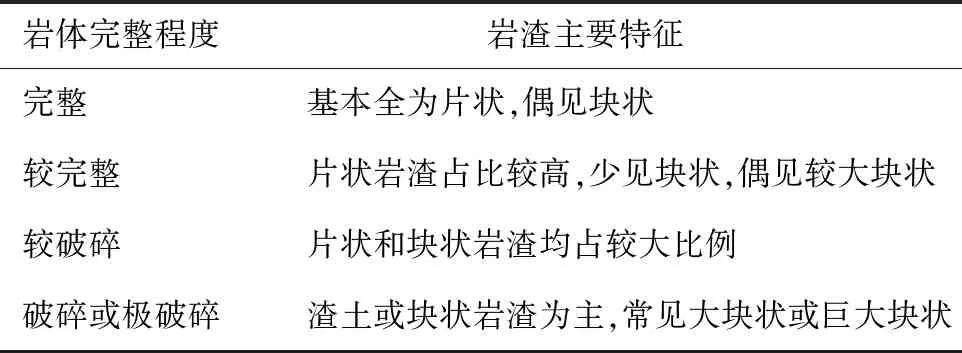
表2 岩渣与岩体完整程度对应关系Table 2 Correspondence between rock muck and rock mass integrity

(a)完整岩体的岩渣
1.3 TBM掘进岩渣图像特点分析
本文处理对象为TBM掘进过程中皮带机上的岩渣图像。在识别方法研究阶段,为确保岩渣图像清晰,岩渣图像拍摄于皮带机停机状态,后续工程应用时可采取高速摄影等拍摄手段,本文在此不做进一步探讨。图像宽度对应皮带机运载渣料时的宽度,目的是以皮带机实际宽度为参考标准计算图像中岩渣的实际粒径大小。4种具有代表性的岩渣图像如图3所示。
对岩渣图像进行分析,总结其特点如下:
1)TBM岩渣本身纹理复杂,还包含有水、泥、岩粉等,导致采集的岩渣图像噪声严重,边缘特征不明显。
2)TBM岩渣尺寸差异大,最大岩渣粒径可以达到300 mm以上,而最小的不足1 mm。
3)岩渣图像复杂多变。TBM出渣量大小不同,导致采集的岩渣图像具有不同的特点。当出渣量小时,岩渣边缘被水覆盖,各岩渣之间不存在堆积情况,岩渣基本对应图像中的暗区域,如图3(a)所示;当出渣量大时,岩渣表面被岩粉覆盖,岩渣颗粒堆积情况严重,岩渣基本对应图像中的亮区域,如图3(b)—(d)所示。

(a)
2 TBM掘进岩渣图像分割
图像分割是图像处理技术的关键,分割效果的好坏直接影响后续分析与识别的结果。目前常规图像分割研究已比较成熟,提出的分割算法很多,但各有优缺点。
本文针对岩渣图像的特点,选择基于标记的分水岭算法对图像进行分割[19]。分水岭算法定位准确,可直接得到连续闭合的单像素边界,对图像中粘连目标分割具有较好的效果,但直接使用分水岭变换存在严重的过分割现象。图像中的噪声、岩渣自身纹理等细微灰度变化都会导致图像中产生大量的伪局部极小值,引起过分割。基于标记的分水岭变换可以通过标记控制去掉伪极小值区域,使局部极小值仅出现在标记位置,减少过分割。标记分水岭算法的关键在于前景、背景标记的提取,标记越准确,分割效果则越好。因此,本文根据岩渣图像特点,对标记方法进行改进,提出一种适用于TBM岩渣图像的标记分水岭分割方法。
2.1 算法流程
基于改进的标记分水岭岩渣图像分割算法主要分为以下5部分,算法流程如图4所示。
1)图像预处理。图像预处理包括:图像读取、灰度化、尺寸大小调整和双边滤波。
2)梯度图像。对原图重构结果进行形态学梯度运算,得到梯度图像,将其作为分水岭分割的对象。
3)前景标记。对预处理图像进行阈值分割,其分割结果作为初始前景标记;对初始前景标记进行优化,得到前景标记。
4)背景标记。对初始前景标记的距离变换图像进行分水岭变换,得到背景标记。
5)梯度分水岭变换。根据前景、背景标记对梯度图像进行修正,对修正后的梯度图像进行分水岭分割。

图4 算法流程图Fig.4 Flowchart of proposed algorithm
2.2 前景标记的获取
标记分水岭算法分割效果的好坏取决于标记的提取是否准确,其最为理想的情况是提取的每一个标记均对应图像中一个目标所在位置。本文将图像分割的研究重点放在前景标记的获取部分。为获得目标位置准确的前景标记,先对预处理后的图像做阈值分割,对分割结果进行形态学处理,实现目标与背景的初步分离,将最终处理结果作为初始前景标记;再对初始前景标记进行优化,去除不合理标记,并经过距离变换和形态重构h顶变换运算,实现粘连目标分离。
因此前景标记的提取过程可分为2部分。1)初始前景标记获取:阈值分割。2)初始前景标记优化:距离变换和形态重构h顶变换。
2.2.1 初始前景标记获取
将Otsu全局阈值分割方法和顶帽变换的局部阈值分割方法结合,以减少目标之间的粘连,得到效果更好的初始前景标记。具体处理步骤如下:步骤1,将预处理图像先重构再做Otsu全局阈值分割,将分割结果与局部阈值分割结果相减,再进行闭/开运算、填充等处理,得到二值图像;步骤2,将步骤1中的二值图像与梯度图像的Otsu阈值分割结果结合,再进行开运算、填充、腐蚀、删除杂质点等处理,将处理后的二值图像作为初始前景标记。
1)Otsu法。Otsu法即最大类间差法[20],算法假设根据阈值可将图像像素分成目标和背景2部分,计算区分这2部分像素的最佳阈值,使其类间方差最大。Otsu法分割过程简单、性能稳定,可快速得到图像的大致轮廓,是一种自适应阈值分割算法,但比较适用于目标与背景具有较强对比度的图像。
2)顶帽变换。顶帽变换定义为原图减去开运算结果图:
That=f-(f∘b)。
(1)
式中:f为输入图像;b为结构元素。顶帽变换可以将比背景稍亮一些的区域分离出来。对预处理图像进行顶帽变换的局部阈值分割,刚好可以将与目标灰度相差不大的部分背景区域提取出来。
前景标记获取如图5所示。从图像处理结果看,直接对图像进行Otsu 法全局阈值分割,分割结果并不理想,如图5(b)所示。由于图像中部分背景区域(岩渣边缘)与目标灰度相差不大,而被分割成目标区域,导致目标粘连严重。因此,本文将全局阈值分割结果与顶帽变换的局部阈值分割结果相减,目标之间的粘连有所减弱,如图5(c)所示;然后,再与梯度图像的Otsu阈值分割结果结合,目标之间的粘连再次减弱,如图5(d)所示;最后,对结合结果进行开运算、填充、腐蚀、删除杂质点等处理,此时得到的二值图像中大部分目标已被分离,如图5(e)所示。
对图像进行阈值分割及后续处理,可以将目标和背景区域分离,但此时的二值图像并不能直接作为最终分割结果。因为对其进行了形态学腐蚀操作,目的是减弱目标之间的粘连程度,但同时也改变了目标的形状与大小,导致最终分割结果与实际目标不符。但是,可以将二值图像作为分水岭分割的初始前景标记,图像中的大部分目标已被分离开,且每个目标基本对应一个标记,目标标记位置准确。
2.2.2 初始前景标记优化
图像阈值分割结果中可能仍会有目标粘连情况,若将其直接作为前景标记,可能会导致欠分割;因此,将其作为初始前景标记,并进行优化。优化步骤如下:
步骤1,根据岩渣的最小外接矩形面积和长、短轴比值,去除部分不合理标记(受刀盘结构限制,巨大块状的岩渣一般会经过二次挤压破碎,基本不存在40 cm以上的岩渣;另外,岩渣短轴越大,其长、短轴比值的范围会越小)。
步骤2,根据矩形度大小将标记分为单目标标记和粘连目标标记。矩形度大于0.5的视为单目标标记,将直接作为前景标记;矩形度小于0.5的视为粘连目标标记,需进行后续判断与处理。
步骤3,对步骤2中的粘连目标标记图像进行距离变换,对距离变换图像进行形态重构h顶变换运算,实现粘连目标的分离,将处理后的结果作为前景标记(fgm)。
1)距离变换。距离变换图像中,每个像素的像素值用该像素与图像中所有背景像素间的最小距离值表示[21]。因此,通过距离变换可以区分出图像中目标的边界像素点和内部像素点,离边界越远的点值越大,体现在距离图像上亮度越高。
2)形态重构h顶变换。形态重构h顶变换是建立在测地膨胀[22]基础上的,测地膨胀定义为:
(2)
式中:F为标记图像;G为掩模图像;B为结构元素。
式(2)针对于灰度图像,二值图像将最大值和最小值运算转变为“与”和“或”运算即可。标记图像F关于掩模图像G的测地膨胀,反复迭代直至稳定状态,即可定义为F对G的膨胀形态学重构。
形态重构h顶变换是标记图像F对掩模图像G的膨胀形态学重构,其中F=G-h(h为常数)。
对距离变换图像进行形态重构h顶变换,可提取距离变换图像中的高亮部分,其中,标记图像F=DT-h,DT为距离变换图像。掩模图像G=DT;重构结果IM=RDT(DT-h);提取的高亮部分(局部极大值区域)dome=DT-IM;h为差值参数(常数),表明了提取出的结构高度[23],h的取值大小决定了重构保留的细节是多少,h越小,重构保留的细节越多,提取的高亮部分越少。
初始前景标记经过腐蚀操作,已经极大地削弱了目标之间的粘连程度,目标轻微粘连情况,边界像素间的距离值较小;因此对距离变换图像进行形态重构h顶变换,提取距离变换图像中的高亮部分(局部极大值区域),可将目标粘连的地方削去,实现粘连目标的分离。最终前景标记结果如图5(f)所示。

(a)岩渣图像
2.3 基于标记的分水岭变换
2.3.1 初始梯度图像
梯度图像反映的是图像像素的变化信息,主要用于突出图像轮廓。将其作为分水岭算法的分割对象比在原始图像上使用分水岭算法分割的结果更加准确。
本文采用形态学梯度求取梯度图像。用膨胀后的图像减去腐蚀后的图像,得到的差值图像即为形态学梯度[22]。其运算可表示为
grad=(f⊕b)-(f⊖b)。
(3)
经形态学梯度运算后的岩渣图像,可以更好地反映出岩渣的边缘信息,但受噪声和岩渣本身纹理等影响,得到的梯度图像中会存在大量的伪局部极值点,需对其进行修正。
本文的初始梯度图像是对原图重构结果进行形态学梯度运算得到的,如图6(a)所示。对原图进行形态学重构可以先滤除部分噪声和复杂细小纹理,消除部分伪局部极值,简化图像,便于后续处理。
2.3.2 梯度分水岭变换
分水岭算法借助了地形学的概念,将图像分割过程模拟成地理学中地形被浸没的过程,本质上是一种区域生长算法。分水岭算法分割图像,其分割区域的个数由局部极小值数量决定,当局部极小值个数大于目标数时,导致过分割,反之,则导致欠分割[24]。
对初始前景标记的距离变换图像进行分水岭变换,将分水岭变换脊线(bgm=0)作为背景标记,如图6(b)所示。利用强制最小值标定算法[25],对初始梯度图像进行修正,使得修正后的梯度图像仅在标记对应位置存在极小值,如图6(c)所示。对修正后的梯度图像进行分水岭变换,得到最终分割结果,如图6(d)所示。

(a)初始梯度图像
3 TBM掘进岩渣图像识别
图像识别包含图像特征提取和图像分类2部分。对图像进行改进标记的分水岭分割,只是将岩渣颗粒从图像背景中分离出来,接下来需对岩渣图像进行特征提取,根据提取的特征对岩渣图像进行分类。
3.1 岩渣图像特征提取
根据岩渣特征与岩体完整程度的对应关系可以看出,岩渣的形状和粒径大小是区分岩体完整程度的主要特征。因此提取的特征参数主要有:
1)长轴。岩渣长度,最小外接矩形长边,用于反映粒径大小。
2)短轴。岩渣宽度,最小外接矩形短边,用于反映岩渣形状;片状岩渣的宽度受刀间距影响,一般小于刀间距。
3)长、短轴比。用于判断岩渣形状。
4)圆形度。圆形度R是用来描述目标形状与圆形相似程度的量,是目标形状复杂度的一种度量,理论上圆形度的值不大于1,目标形状越复杂,圆形度值越小[22]。圆形度用于去除不属于岩渣的分割区域。分割过程中受水、泥土等影响,可能会导致分割结果中存在非目标岩渣的分割区域。由于岩渣多为长圆形片状或立方体状,其分割区域形状较为简单,图像中的非岩渣分割区域形状又多为复杂,因此,可通过圆形度判断分割区域是否为岩渣。计算公式:
R=4πS/l2。
(4)
式中:S为连通域面积;l为连通域周长。
5)岩渣数量。用于判断出渣量的多少。
3.2 岩渣图像分类
岩渣形状和粒径大小是判断岩体完整程度的主要特征。先根据提取的特征参数对岩渣的形状和粒径大小进行分类,再根据分类结果对岩渣图像进行分类,岩渣图像分类结果与岩体完整程度相对应。
3.2.1 岩渣形状分类
TBM开挖的渣料一般由片状、块状和粉状岩渣构成。其中,片状岩渣为盘形滚刀切削下来的典型岩渣,近似椭圆形,长轴长度一般为1~2倍刀间距,短轴长度一般不会超过刀间距;块状岩渣多为立方体状,岩渣短轴大于刀间距的一般为块状;由于粉状岩渣无法通过图像进行识别,本文也并未把粉状岩渣作为主要特征,故在此不予分析。
对TBM掘进岩渣图像中片状岩渣和块状岩渣的尺寸进行测量统计与分析,得到以下分类:
1)短轴小于最大刀间距、长短轴比值小于1.5,为小片状或小块状岩渣;
2)短轴小于最大刀间距、长短轴比值大于1.5,定为片状岩渣;
3)短轴大于最大刀间距,定为大块状岩渣。
3.2.2 岩渣粒径大小分类
虽然岩渣特征变化基本规律相同,但各工程的地质条件不同,导致粒径范围会略有不同。对以往研究[8-11,26]和依托工程的岩渣粒径大小规律进行总结,并结合岩渣图像中岩渣尺寸的测量结果,分类如下:1)长轴小于10 cm的岩渣;2)长轴在10~15 cm的片状岩渣;3)长轴在10~15 cm的块状岩渣;4)长轴在15~20 cm的片状岩渣;5)长轴在15~20 cm的块状岩渣;6)长轴大于20 cm的岩渣。
3.2.3 岩渣图像分类
根据岩渣与岩体完整程度对应关系以及岩渣形状和粒径大小的分类结果,对岩渣图像进行分类,见表3。

表3 岩渣图像分类Table 3 Classification of rock muck images
4 工程应用验证
本文研究目标为拍摄于皮带机上的岩渣图像。以皮带机实际宽度为参考,可以计算出图像中岩渣的实际尺寸。岩渣图像中皮带机的实际宽度为75 cm,为便于图像分割处理,统一对图像进行了裁剪,宽度为原来的3/5,即45 cm,长度不变;因此处理的图像实际大小为45 cm×100 cm,对应图像尺寸大小为1 080 pixels×2 400 pixels。
应用matlab2014b软件编程实现岩渣图像的分割与识别。为验证本文图像识别方法的准确性,将岩渣图像分类结果与实际岩体完整程度进行对比。根据施工现场给出的实际围岩类别和岩体条件,分别选取A(岩体完整)、B(岩体较完整)、C(岩体较破碎)类围岩下80、50、30张岩渣图像进行验证,每10张为1组,共16组,每组为不同时间段连续拍摄的10张图像。
4.1 图像分割结果及分析
对采集到的岩渣图像进行分析发现,TBM出渣量大小不同,导致岩渣对应图像中的明暗区域不同;因此本文在进行图像分割时,将岩渣图像分为了2大类。1)岩渣含水量较大,图像阈值分割后岩渣为背景区域;2)常规岩渣图像,阈值分割后岩渣为前景区域。针对这2类图像,分别给出了相应的分割代码,分割方法及过程均相同,只是其中个别参数设置不同,以及当岩渣对应图像中的背景区域时,对全局阈值分割结果进行取反操作,使二值图像中目标像素变为1,以便于后续处理。在图像预处理阶段,先根据重构后的岩渣图像中连通域的数量对2类图像进行自动区分,再分别进行后续处理。
表4给出了应用本文算法进行岩渣图像分割的结果以及对算法性能的客观评价结果。
表4中图(a)—(d)是4幅具有代表性的岩渣图像分割结果。其中,图(a)代表含有大量水的岩渣,岩渣与水对比较为明显,整体分割效果较好,极少量岩渣被水覆盖,边缘不清晰,未被检测出;图(b)—(c)代表一般岩体下岩渣,岩渣受水、泥和岩粉等影响较小,易于识别,分割效果比较理想;图(d)为混合有大量泥土的岩渣。该算法对检测到的图像表面的岩渣,分割效果较好,少部分岩渣与背景灰度极为相近,无法检测到其边缘特征。
上述分析为对算法分割效果的定性分析,为正确、客观评价岩渣图像分割算法的性能,将图像分割结果与人工识别结果进行对比,采用准确率(PR)和误差率(ER)2个性能指标进行分析,计算公式如下:
(5)
(6)
式(5)—(6)中:NAT为正确分割区域个数(目标分割区域与岩渣实际大小基本相同);N为目标区域个数,即人工计数法得到的岩渣数量;NA为算法分割后自动统计的目标区域个数。
根据表4的图像分割结果及性能指标分析可知,该算法对于复杂岩渣图像能够进行有效分割,大部分岩渣可以被完整地分割出来,边缘定位比较准确,目标粘连问题也得到很好的解决,岩渣图像分割效果较为理想,准确率较高。
从16组图像分割结果看,本文提出的改进标记的分水岭分割方法对这16种类型的岩渣图像均适用,但分割效果不同,少部分图像的分割误差较大。
4.2 图像识别结果及分析
16组岩渣图像的识别分类结果如表5所示。采用准确率(TPR)作为该识别算法的性能评价指标,计算公式如下:
(7)
式中:TP为算法预测类别与实际类别相同的岩渣图像数量;FN为算法预测类别与实际类别不同的岩渣图像数量。

表5 岩渣图像分类结果Table 5 Classification results of rock muck images
表5中,A、B、C类岩体对应的岩渣图像分类结果准确率分别为96.3%、94%、86.7%。岩渣图像分类结果的误差在可接受范围内,说明本文提出的岩渣图像分割与识别方法是可行的。
5 结论与讨论
1)本文采用提出的改进标记分水岭算法对TBM岩渣图像进行分割,重点对标记获取方法进行改进,将处理后的阈值分割结果作为分水岭变换的前景标记。验证结果表明,此算法得到的目标标记位置准确,有效实现了粘连目标的自动分割,岩渣图像分割效果较为理想,算法性能可以满足后续处理需求。
2)在图像分割结果基础上,对岩渣图像进行特征提取和分类,岩渣图像分类结果与岩体完整程度相对应。经测试验证,A(岩体完整)、B(岩体较完整)、C(岩体较破碎)类对应的岩渣图像分类结果的准确率分别为96.3%、94%、86.7%,方法准确性比较高,可以有效实现岩渣的自动分析与识别。
3)TBM岩渣图像比较复杂,平均每张图像用时6.15 s,TBM掘进速度一般在10~100 mm/min,因此该方法基本可以满足实时处理的要求,可以对在掘岩体状况和变化趋势及时判别预警。此方法的提出为TBM在掘岩体的智能化识别及不良地质预警提供了可行性。
由于目前分析的每张岩渣图像对应皮带机上1 m的岩渣,不同岩体完整程度下的1张岩渣图像可能差别不大,导致分类结果存在误差。因此在根据岩渣图像判断岩体完整程度时,需根据1组图像(选择合适周期连续采集)的整体特征来判断,或是将1组图像中占比最大的定为最终类别。另外,岩渣图像复杂多变,将来可考虑将岩渣图像识别结合掘进参数识别的方法对岩体条件进行综合判断。

