一种非接触式测量简单物体形态的装置
2021-07-22张萌谷栎娜张通
张萌,谷栎娜,张通
(石家庄工程职业学院,河北石家庄,050061)
0 引言
随着计算机信息技术的快速发展,人工智能、大数据、云计算和物联网的未来发展,图像识别作为AI技术的支撑,被广泛应用于众多的领域。例如:导航、地图与地形配准、自然资源分析、天气预报、环境监测等。在人们日常生活、工作中也离不开图像识别技术。图像识别是计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对像的技术。
本文所研究的非接触物体尺寸形态测量就是利用STM32单片机对OV7725摄像头采集的图像进行预处理、分割、特征提取和判断匹配,最后获得物体的形状、大小以及该物体的距离。
1 总体方案部分
1.1 系统设计原理
本文设计的非接触式物体形态测量装置,包括两部分:形态识别部分,测距部分。系统总体设计框图如图1所示。

图1 系统总体设计框图
形态识别部分利用OV7725摄像头模块采集目标物的图像信息,并传到STM32F429单片机,由单片机对采集到的图像信息进行灰度、二值化处理,并获得二值图像数据。
测距部分利用超声波测距设备测量目标物和摄像头之间的距离,并将测量的数据显示到TFT-LCD显示器上。
再结合二值图像数据和目标物与摄像头之间的距离,利用像素分析算法进行分析处理,获得目标物的尺寸、面积、形状信息,最后传输给TFT-LCD显示屏进行显示。
1.2 方案论证
1.2.1 主控芯片选择
根据系统性能要求,单片机主要进行系统控制、图像处理和识别算法运算,需选用运行速度快、功能强大的控制器。因此采用STM32F429单片机作为主控单片机,其容量大,处理速度快,最高主频达到180MHz。除此之外,芯片内嵌资源丰富,8个串口、16个定时器,3个ADC共24通道,2个DAC,DCMI摄像接口百兆以太网,全速USB OTG、高速USB OTG。
1.2.2 测距传感器选择
为了精确的测量物体的距离,本设计采用超声波传感器。它是将超声波信号转换成其他能量信号(通常是电信号)的传感器。超声波具有指向性强、能量消耗缓慢、传播距离相对较远等特点,因此常被用于非接触测距。超声波测距对环境有较好的适应能力,此外超声波测量在实时、精度、价格也能得到很好的折衷。
1.2.3 图像采集方案的选择
根据系统功能要求,关于图像采集采用的是ATK-OV7725摄像头模块。
ATK-OV7725摄像头模块具有8位数据接口,SCCB控制接口,输出格式有RGB、RawRGB,接口简单,使用方便,支持各种尺寸输出,支持图像缩放、平移和窗口设置等优点。通过摄像头对目标物进行图像识别,速度快、方便一次成型但对软件控制能力要求较高。
1.2.4 显示装置的选择
为了更好地观察测量的数据,显示装置采用的是TFTLCD显示屏模块。
TFT-LCD显示屏模块800480是一款4.3寸高清全视角彩色TFT液晶屏,分辨率高达800×400,显示方向为横屏显示的TFT液晶屏。上下左右四个方向均可达到80度可视角度。产品接口为24bit RGB接口,自带升压电路,驱动电压为3.3V。高端人机界面用TFT液晶屏。
2 理论分析与计算
2.1 目标物面积计算
非接触式物体形态测量装置选用480mm×800mm的TFTLCD显示屏,采集的目标物图像尺寸为320mm×240mm,为了减小误差,截取中心部分120mm×120mm区域为分析对象。
首先,采集背景板1m×1m的图像,经过计算分析,当背景板和摄像头之间的距离为l1时,获得其像素点总个数,记为n1;
其次,采集目标物的图像,经过灰度、二值化处理后,统计目标物像素个数,记为n2;由超声波测距部分测得目标物和摄像头之间的距离为l2时,则通过分析计算,求得目标物体积S为:

需要经过多次测量,对目标物像素点个数进行校正,以保证对目标物面积计算的准确性。
2.2 目标物形态分析
根据目标物的形态特征,结合对目标物像素点的个数分析,从而判断目标物的形态。
将像素点看成矩阵,进行分析。
首先取目标物中心位置的像素点个数,记为num-mid;
从中心位置往上n行,取像素点个数,记为num-highn;
从中心位置往下n行,取像素点个数,记为num-lown;
如果num-mid=num-highn=num-lown,则符合正方形的形态特征(允许误差在5个像素点以内);
如 果 num-mid>num-highn,nummid>num-lown,则符合圆的形态特征(允许误差在5个像素点以内);
如果num-lown>num-mid>num-highn,则符合三角形的形态特征(允许误差在5个像素点以内);
经多次取值,对目标物形态特征进行多次验证,从而准确判断出目标物形态。
2.3 目标物边长计算
已知目标物面积和形态,则可以理论推导出目标物的尺寸(边长或直径)。
2.4 中心点对正调试
由摄像头获取目标物图像,根据目标物图像像素点在显示屏120mm×120mm区域内的总数进行分析调整,通过行列扫描,判断出目标物的偏移位置,从而获取目标物中心点的位置,由云台驱动激光点进行中心点对正调整。
3 系统软件设计
非接触式物体形态测量装置是由STM32F429单片机作为主控芯片,将ATK-OV7725摄像头模块对目标物进行图像采集,并将采集的信息传输给单片机进行数据处理和分析。同时,STM32F429单片机控制测距模块,获得目标物与测量头的距离,距离结合目标图像数据,获取目标图像像素点的面积,进而利用相关算法推算出目标形状、尺寸。
非接触式物体形态测量装置原理图,如图2所示。
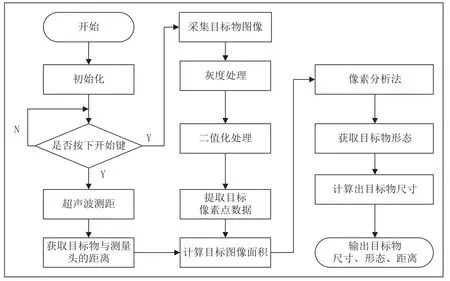
图2 非接触式物体形态测量装置原理图
4 测试方案与测试结果
4.1 测试方案
系统测试需要分别对硬件、软件以及整个系统进行测试。硬件测试包括对云台的测试、整个系统上电后的运行测试为主。软件测试主要对写好的程序进行仿真运行。软硬件的测试做好以后,进行整机调试。整机调试非常关键,要进行不断调试,让软件和硬件完美结合,这样才能达到预期的效果。
4.2 测试结果
非接触式物体形态测量装置能够准确的识别一些简单物体的形状,同时也能精确地计算该物体的大小。在整个测试过程中,该装置不够稳定,略微有些晃动,但不影响最终的测试结果。
5 总结
本系统使用了STM32芯片搭建了拥有高速处理能力、低成本的非接触式物体形态测量的硬件平台。
非接触式物体形态测量装置已制作完成,目前能够测试一些简单形状的物体。在实际运行中可能还会出现许多未曾考虑到的问题,有待于进一步完善。下一步的具体工作主要有:优化软件流程,加快执行速度,对于不同形状的物体识别方面更优化、更准确;优化硬件结构,使云台运动更自如,选取更合适的摄像头增强其环境适用性,最大限度降低环境影响采集数据的准确性。
