基于Kriging的永磁电机转速转矩曲线计算方法
2021-07-22罗明玮陈敏祥
罗明玮,陈敏祥
(浙江大学 电气工程学院,杭州 310027)
0 引 言
ANSYS Maxwell是一个基于有限元分析的电磁场分析软件,在电机设计与优化中广泛应用。最初ANSYS Maxwell仅适用于对电机的磁场分析以及对性能的研究与优化,例如对电机磁路的设计以及对齿槽转矩的优化等。随着ANSYS Maxwell应用的不断发展,以及人们对电机参数在控制方式中的影响越来越关注,出现了将电机本体仿真与控制策略相结合的仿真。如Takashi等人[1]利用Simplorer搭建的PWM模块,dq变换模块等实现控制电路,与ANSYS Maxwell实现场路耦合计算。但是ANSYS Maxwell与Simplorer的联合仿真需要耗费大量时间,Simplorer计算完成一个步长之后,将得到的控制电压反馈给ANSYS Maxwell,在ANSYS Maxwell中进行电磁场计算,计算完成后再将控制所需要的量反馈给Simplorer。因此在ANSYS Maxwell与Simplorer中设置的步长需要相互配合。同时,若想实现最大转矩电流控制或者弱磁控制等控制策略,在Simplorer中需要搭建复杂的电路,并且需要调试控制参数,这也给非电机控制专业的研究人员带来了困难。
文献[2]提出了对电流矢量有效值与内功率因数角进行扫描,通过找到扫描点中转矩最大的点实现弱磁控制,绘制出弱磁控制下的转速转矩曲线,并通过MATLAB验证了该方法的可行性。相较于ANSYS Maxwell与Simplorer联合仿真,该方法更加简单,不需要搭建电路。但是在ANSYS Maxwell中需要进行大量的扫描工作,这将耗费大量的时间。因此,如何在节约时间的情况下通过ANSYS Maxwell得到准确的TN曲线,仍是一个值得探讨的问题。
本文将Kriging模型与ANSYS Maxwell相结合,通过对Kriging模型寻优得到电压电流极限圆内转矩最大值,最终得到弱磁下的转速转矩曲线,并与文献[2]的扫描法相对比。
1 基于Kriging的转速转矩曲线计算方法
1.1 基于ANSYS Maxwell的弱磁控制
在电机控制中,当转速超过一定值后,考虑到电机与逆变器的额定电压,存在极限电压进行约束与极限电流约束,因此需采用弱磁控制,对内部电压进行调整,来有效拓宽永磁电机的调速范围。在ANSYS Maxwell中实现弱磁控制,即计算某一转速下能够输出的最大转矩。将A相轴与q轴对齐,即设置电机初始角度,在0时刻,A相的空载反电动势过0,而ABC三相电流激励设置如下:
(1)
(2)
式中:Im为输入电流的峰值,θ为A相轴与q轴之间的角度,ω为电角频率。
文献[1]采用扫描法对θ从-90°至90°进行扫描以找到最大输出转矩,该方法仿真次数多且耗时。本文使用Kriging模型预测得到的电压与转矩值,代替仿真获得的真实电压与转矩值来进行寻优,以获得下一个待仿真的θ值。
1.2 Kriging模型
在电机的控制系统中,对于输入的电流矢量有效值与内功率因数角,其输出转矩与电压等参数可以由一个函数F(x)精确算出,但是该函数为黑箱函数,因此在优化过程中需要使用代理模型G(x)来取代真正的模型,即将对目标函数minxF(x)的优化转化成为minxG(x)。本文考虑将代理模型Kriging模型作为转矩与电压的预测模型。其中Kriging是一种插值方法,由南非采矿工程师Krige提出[3]。
Kriging模型是一种无偏最优估计模型,将响应函数由线性回归项fT(x)β与随机误差项z(x)表示:
y(x)=fT(x)β+z(x)
(3)
式中:f(x)=[f1(x),f2(x),…,fm(x)]T为基函数的线性组合;β=[β1,β2,…,βm]T为对应基函数的系数向量;m表示所用的基函数个数;z(x)为随机误差项,用一个均值为0、方差为σ2的非零协方差函数得到:
(4)
对于未知点,可以利用已知点的响应进行线性逼近:
(5)
达到无偏最优估计,即使得用已知点线性逼近得到的值与响应函数值之间的误差函数的期望为0,方差最小:
(6)
最终通过构建拉格朗日函数解出响应函数:
(7)
式中:RQ为n×n矩阵。
(8)
1.3 差分进化算法
在获得转矩与电压的Kriging模型后,需要对Kriging模型进行寻优,找到电压极限圆内的转矩最大值。因此需要用到带有约束的差分进化算法。
差分进化是一种基于种群的随机搜索算法,通过优胜劣汰的方式,利用差分变异与交叉变异来产生新的个体,再基于贪婪搜索的思想对种群进行选择,最终产生新的种群。差分进化算法的步骤包括初始化、变异、交叉以及选择等。
一般在差分进化算法中通过随机生成初始种群,使用G∈[0,1,…,Gmax]来表示进化的代数,NP表示种群的大小。搜索空间的维度,即特征的数量为D,初始化如下:
xj,i,G=xj,min+rand[0,1]·(xj,max-xj,min)
(9)
式中:xj,i,G表示第G代的第i个个体的第j个特征;xj,max和xj,min分别代表第j个特征的最大值与最小值;rand[0,1]表示在区间[0,1]内生成的随机数。
初始化后选择种群中的个体进行变异,得到新的个体,常用的为DE/rand策略:
vi,G=xr1,G+F·(xr2,G-xr3,G)
(10)
式中:F为缩放因子,取值范围在(0,1]之间;xr1,G,xr2,G,xr3,G为从种群随机选择但互不相同的个体。
为了增强种群中的多样性,需要对新产生的变异个体与第G代中的xi,G进行个体之间的交叉操作:
(11)
得到试验个体后,需对目标个体xi,G与试验个体ui,G进行选择,在差分进化算法中使用贪婪选择,将最优的个体保留下来:
(12)
在解决带有约束的问题中,需要在选择过程中对不满足约束条件项加上惩罚项,通过将惩罚因子加入到个体的目标函数值中,将约束优化问题转化为非约束优化问题。
1.4 基于Kriging模型的转速转矩曲线仿真与计算
Ansoft Maxwell软件提供了脚本功能,通过VB脚本语言与Maxwell提供的函数可以实现对Maxwell的控制,通过Maxwell中Report的导出与VB对excel或者csv表格的读取可以实现数据之间的交互。但是VB语言较繁琐,在科学计算方面能力不足,在工程应用中有许多不便。因此,本文使用Python实现Kriging模型的搭建与差分进化寻优,通过excel或者csv表格实现与VB程序的交互。实现控制步骤如下:
(1)建立ANSYS Maxwell模型,并在Result中设置电压值、转矩等所需输出的Report。
(2)对电机转速与内功率因数角进行随机采样,对随机采样得到的值进行仿真,得到所需建立Kriging模型的输出值。
(3)对上一步得到的输入值与输出值建模,得到初始Kriging模型。
(4)使用差分进化进行寻优。
(5)将差分进化寻优得到的最优输入值通过VB脚本在ANSYS Maxwell中进行设置并仿真,得到输出值。
(6)对得到的电压与转矩进行判断,当仿真得到的电压、转矩与使用Kriging模型预测得到的电压、转矩差值小于所设定的误差,同时此轮寻优得到的最大转矩与上一轮寻优得到的最大转矩差值小于设定值时,输出该最大转矩,否则将该点添加到Kriging模型中进行模型的优化,再返回到步骤(4)。
(7)当所有转速点对应的最大转矩寻优完成或者在中途的转矩已经小于某给定值时便停止,输出转速对应的转矩。
2 有限元结果分析与对比
2.1 基于Kriging与ANSYS Maxwell的电流最佳控制仿真算例
为了验证上述方法的有效性,以一表贴式永磁同步电机为研究对象进行仿真。对该型号电机取电压极限值为额定电压160 V,电流极限值取为4.6 A进行转速转矩曲线的计算,同时电机的电流激励的额定值设置为4.6 A。电机的结构与参数分别如图1与表1所示。
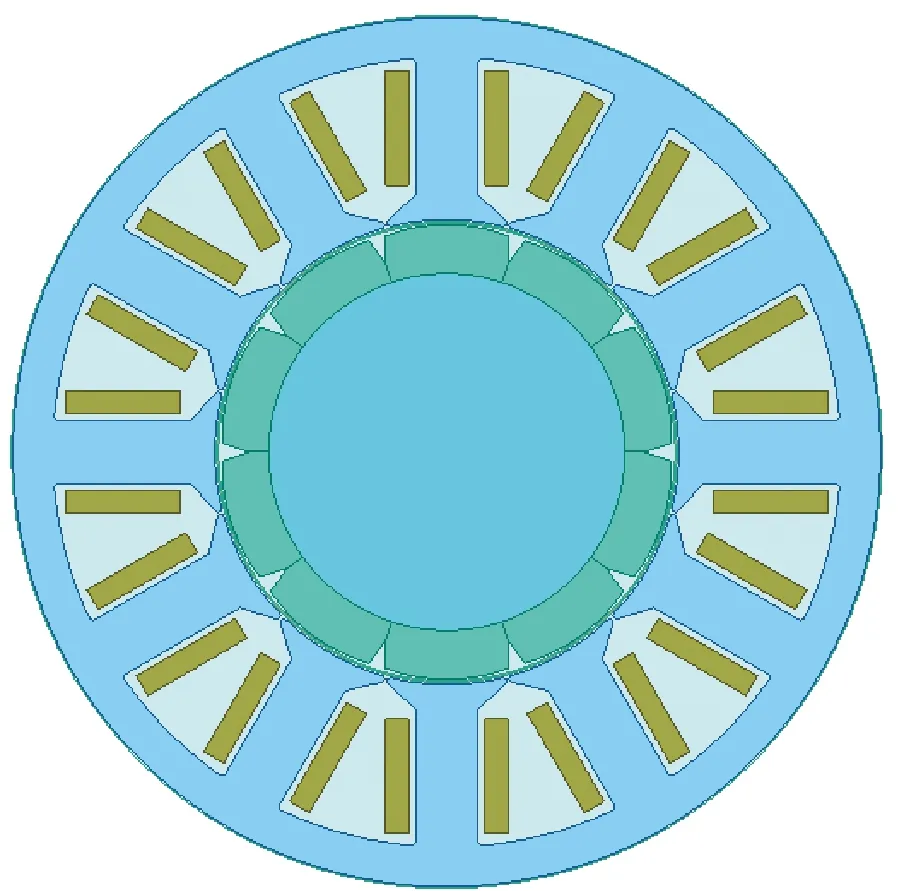
图1 电机结构

表1 表贴式永磁同步电机的主要参数
构建Kriging模型,使用Python中pyKriging库的krige.kriging进行构建,同时库中包含了采样、测试、创建训练Kriging模型以及添加点等功能。基于该库创建训练模型相较于从零搭建模型更加简便,并且可以达到同样甚至更好的效果。
采用扫描法对各个转速与功率因数角进行扫描得到转速转矩曲线,采用Kriging模型进行转速转矩曲线的计算,如图2所示。而速度所对应的A相与q轴之间的角度如图3所示。
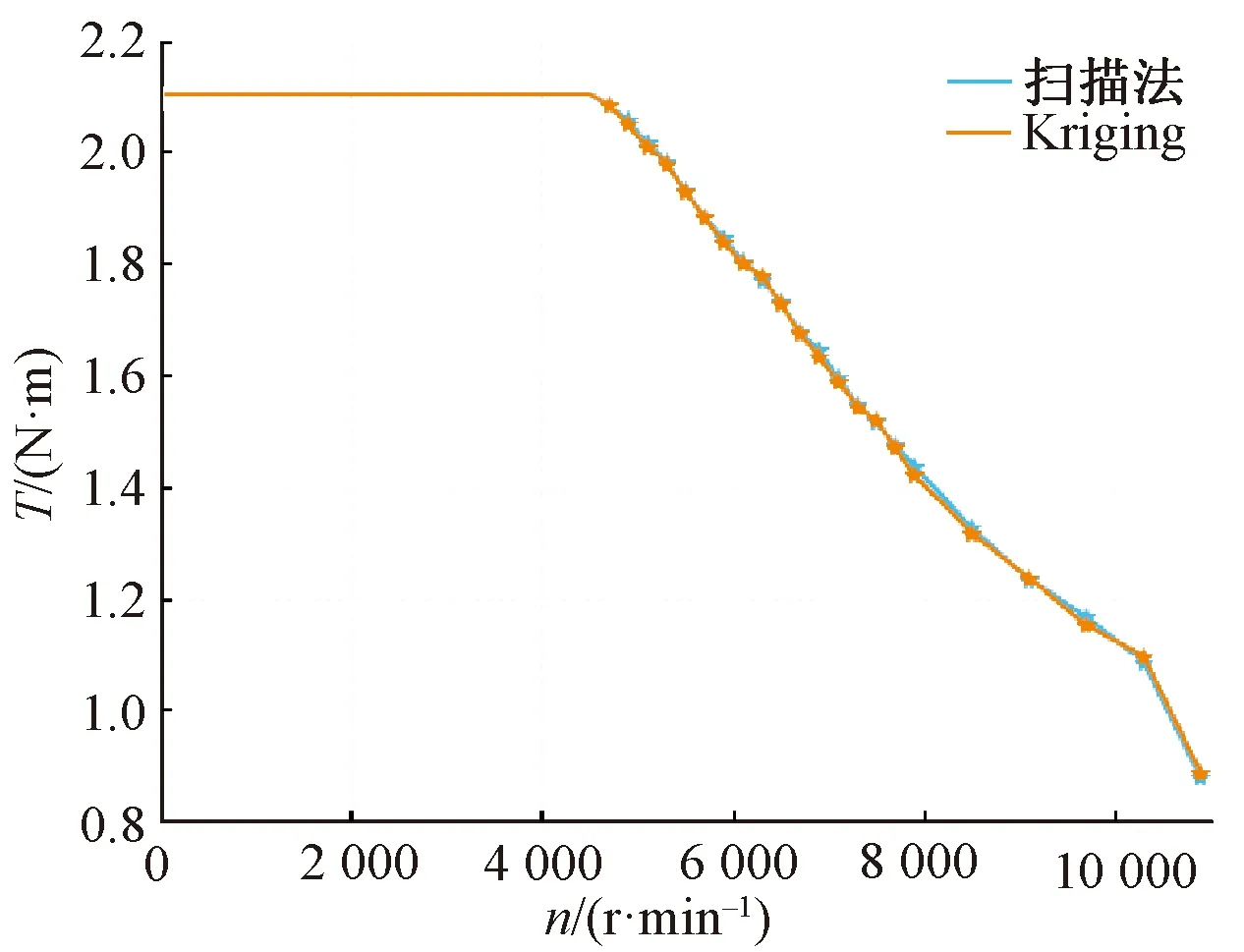
图2 两种计算方法转速转矩曲线对比

图3 两种方法A相与q轴间夹角
可看出,采用这两种方法绘制出转速转矩曲线基本吻合。同时采用Kriging模型所需要仿真点数随仿真次数的变化曲线如图4所示。

图4 Kriging模型运行次数
可以看出,随着运行次数的增加与数据的增多,Kriging模型越来越精确,所需要运行的次数越来越少。在扫描法中,仿真点数为固定值,不随仿真次数的变化而变化,对于每一个速度而言,需要扫描0~90°,当步长为1时,每次需扫描90个点。因此,基于Kriging模型的寻优方法可以大大减少每次扫描的点数。
以上结果表明,本文的基于Kriging模型得到转速转矩曲线方法,提高了基于ANSYS Maxwell扫描获得曲线的速度,并且获得的曲线与ANSYS Maxwell扫描所获得的曲线相吻合。
3 结 语
本文基于ANSYS Maxwell软件,从扫描法出发,提出基于Kriging的永磁电机转速转矩曲线计算方法。该方法在曲线计算过程中,构建电流、A相与d轴夹角,与转矩、最大电压的Kriging模型,并通过差分进化算法,计算得到下一个待仿真的点。Kriging模型的构建减少了曲线计算过程中的扫描次数,并且最终获得的结果与扫描法所得到的结果相比,其精度更高。
