基于S曲线加减速控制方法的轨道交通列车目标速度曲线计算研究
2021-07-21王海南
王海南
(通号城市轨道交通技术有限公司, 100071, 北京∥工程师)
列车的乘坐舒适性是列车动力学性能的评价标准之一,也是信号设备ATO(列车自动运行)系统的性能指标之一。为了提高舒适性,列车加减速度的绝对值不能过大,加减速度的变化也不能太过频繁。现有的ATO系统大多采取在控制列车运行速度的算法(以下简称“控车算法”)中通过添加约束条件的方式限制列车加减速度的变化。这种控制方式糅合到控车算法中,加大了控车算法的复杂度,延缓了级位变化,降低了控车的及时性。在保证列车高效运行的情况下,这种控制方式只是保证了加减速度变化引起的冲击率在设定范围内,并不能有效解决在设定范围内加减速度变化引起的冲击。为了解决此问题,本文对FAO(全自动运行)情况下列车的S曲线加减速控制方法进行研究,并在此基础上将其应用到目标速度曲线计算中,拟合出一条基于S曲线加减速控制方法的目标速度曲线。列车依据此目标速度曲线进行控车,其加减速变化的频率会大大降低,冲击率的变化也会大为减少,这对因减缓机械设备冲击性而减少机械设备的磨损和噪声,以及延长列车的使用寿命都有一定助益。
1 S曲线加减速控制方法
1.1 S曲线加减速控制方法概述
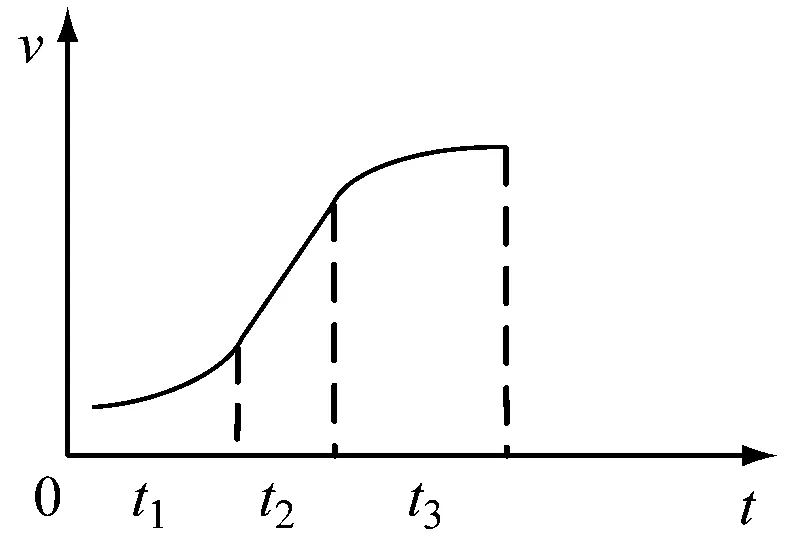
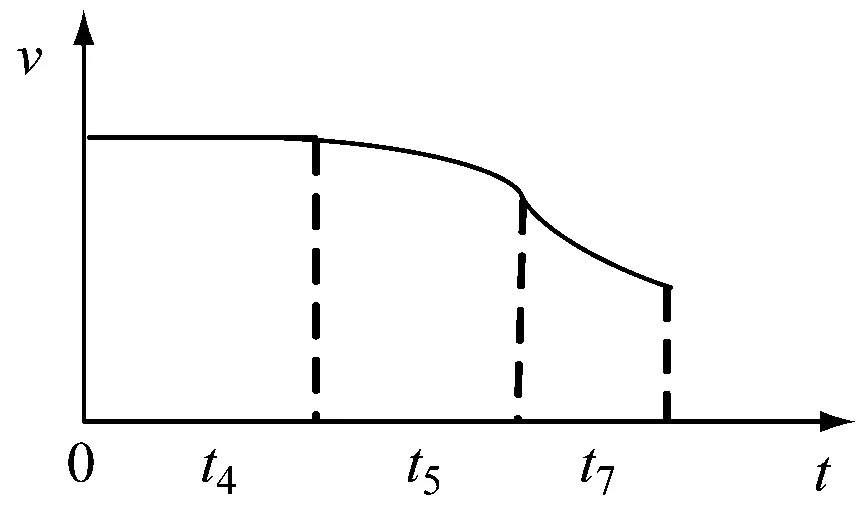
S曲线控制算法目前已在多个领域得到应用,如电梯楼层启动与停止控制、轧钢飞剪与轧辊咬钢控制、无人化行车行走与吊装控制、六轴机器人动作控制等领域。S曲线加减速控制方法将控制过程分为7个阶段:加加速、匀加速、减加速、匀速、加减速、匀减速、减减速,每个阶段所对应的时间段分别为t1、t2、t3、t4、t5、t6、t7,如图1所示。其中,在加加速、减加速、加减速、减减速等4个阶段中,列车的加加速度(即加速度的变化率)J的绝对值恒定;匀加速和匀减速阶段的加速度恒定,amax为最大加速度;匀速过程的加速度为0。这种控制方法在任意时刻的加速度都是连续变化的,可以避免冲击,使速度曲线平滑。
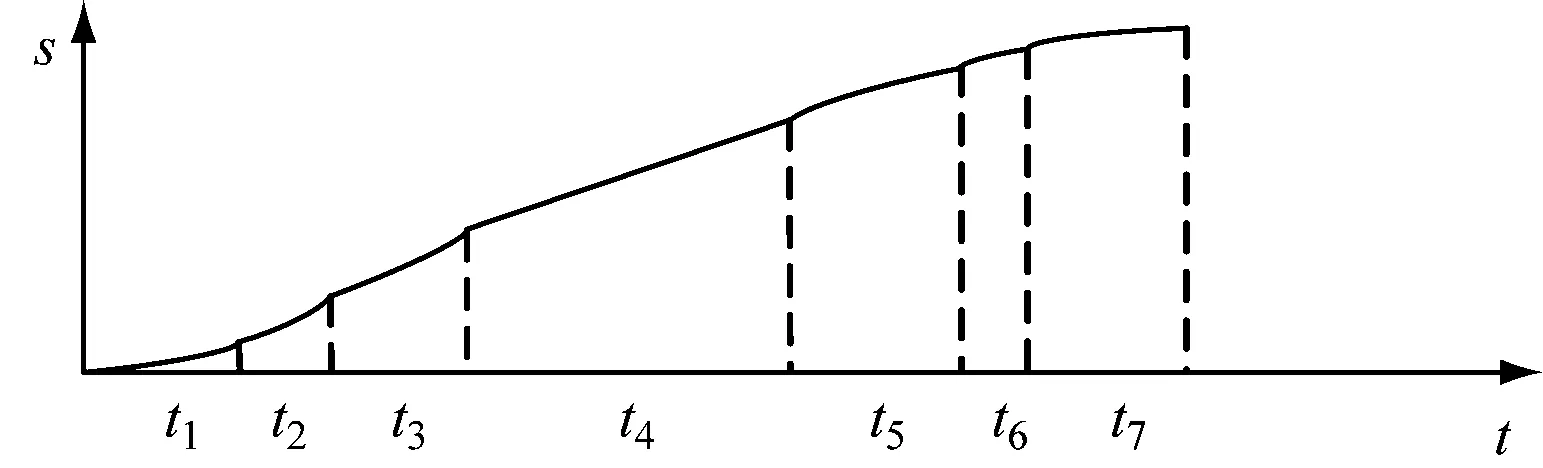
a) 位移s时间曲线
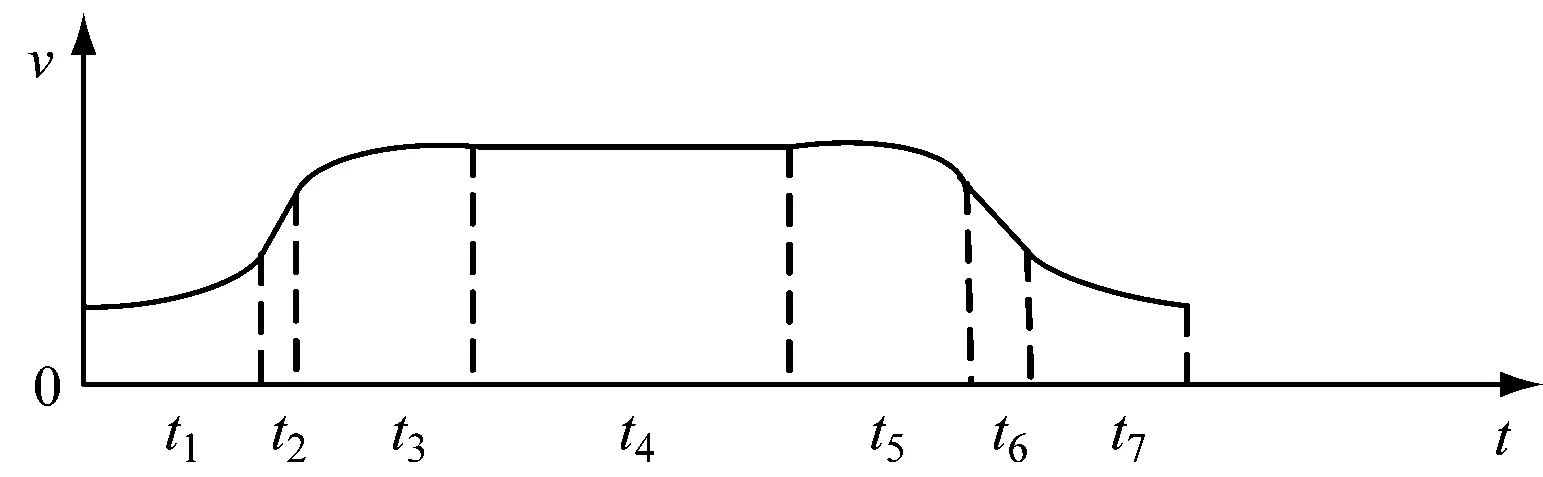
b) 速度v时间曲线
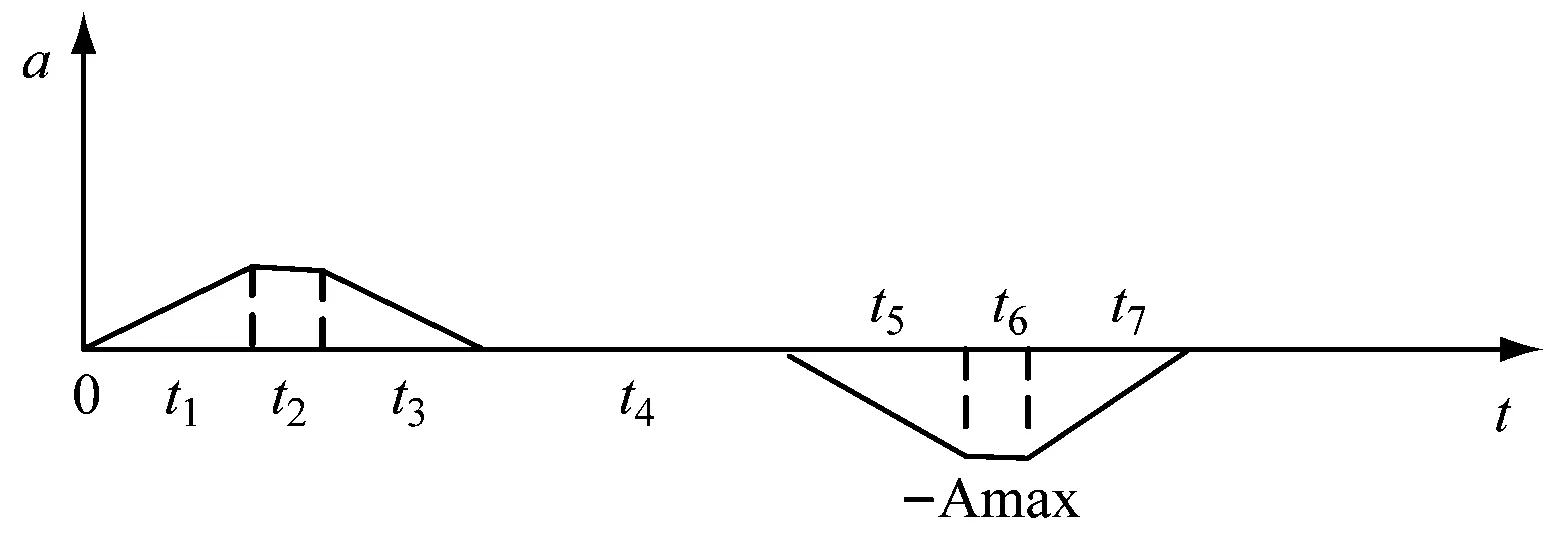
c) 加速度a时间曲线
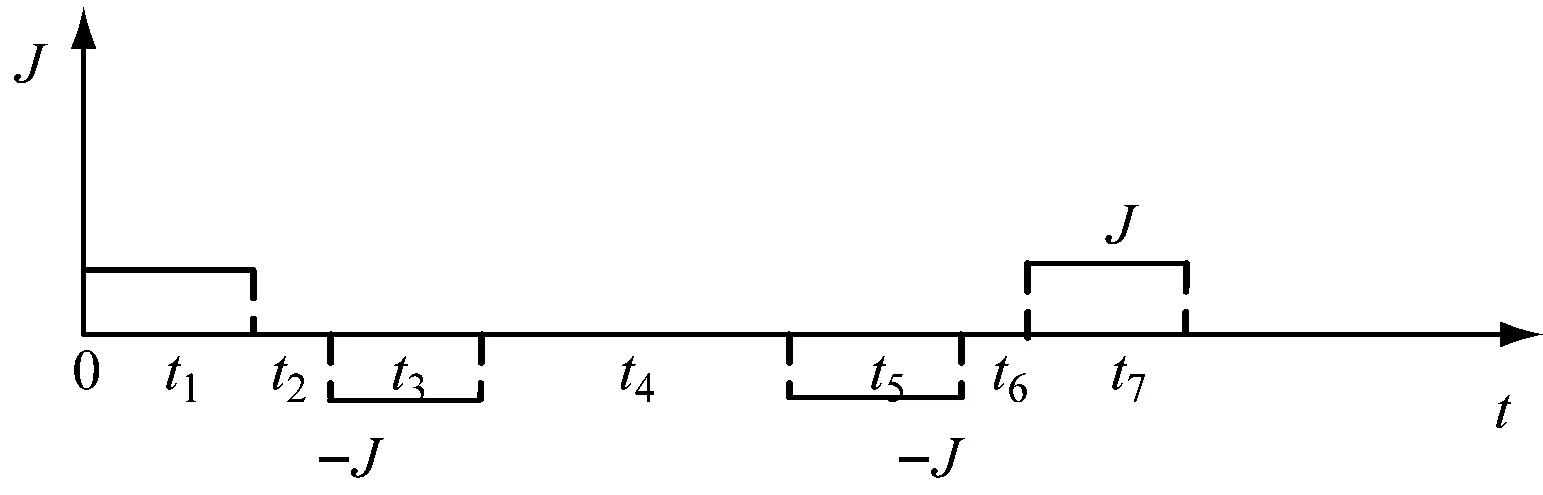
d) 加加速度J时间曲线
1.2 加加速阶段(t1段)的速度、位移计算
设加速度为a1,初始速度为vs,实时速度为vi,因为a1=Jt,故可得到t1段的速度、位移的计算式为:
(1)
(2)
式中:
v1——t1段结束时刻所对应的速度值,m/s;
s1——列车在t1段产生的位移,m。
1.3 匀加速阶段(t2段)的速度、位移计算
v2=v1+amaxt2
(3)
(4)
式中:
v2——t2段结束时刻所对应的速度值,m/s;
s2——列车在t2段产生的位移,m。
1.4 减加速阶段(t3段)的速度、位移计算
设加速度为a3,初始速度为v2,因为a3=Amax-Jt,则可得到t3段的速度、位移的计算为:
(5)
(6)
式中:
v3——t3段结束时刻所对应的速度值,m/s;
s3——列车在t3段产生的位移,m。
1.5 匀速阶段(t4段)的速度、位移计算
v4=v3
(7)
s4=v3t4
(8)
式中:
v4——t4段结束时刻所对应的速度值,m/s;
s4——列车在t4段产生的位移,m。
1.6 加减速阶段(t5段)的速度、位移计算
(9)
(10)
式中:
v5——t5段结束时刻所对应的速度值,m/s;
1.7 匀减速阶段(t6段)的速度、位移计算
v6=v5-amaxt6
(11)
(12)
式中:
v6——t6段结束时刻所对应的速度值,m/s;
s6——列车在t6段产生的位移,m。
1.8 减减速阶段(t7段)的速度、位移计算
设加速度为a7,初始速度为v6,因为a7=-Amax+Jt,则可得到t7段的速度、位移的计算式为:
(13)
(14)
式中:
v7——t7段结束时刻所对应的速度值,m/s;
s7——列车在t7段产生的位移,m。
2 S曲线加减速控制方法在FAO中的应用
由S曲线加减速控制方法在各个阶段的公式可知,速度v和位移s都是基于t的函数,而FAO中目标速度曲线是v基于s的曲线,故需要将S曲线加减速控制方法的基于时间轴t的v、s转换为v基于s的曲线。由于转换后公式比较复杂,不易实现,故采取以下方式来实现v基于s的曲线。FAO运行中,s是已知,通过对时间t逼近得到s对应的t,再根据t获得对应的v,从而实现v基于s的曲线。
爸听我这么说,沉默了。尽管我挑了最适合老年人用的款式,但长年累月的农活让他们的手指粗壮而笨拙,爸一个指头摁下去,能同时覆盖三个按钮。
本文基于S曲线加减速控制方法,对列车在FAO模式下运行,其加减速控制过程的步骤进行分析。
2.1 步骤1
依据线路信息、临时限速信息、进路信息获得一条v基于s的列车速度限制曲线,如图2所示。图2中的目标点1至目标点8是线路限制速度变化的控制点。
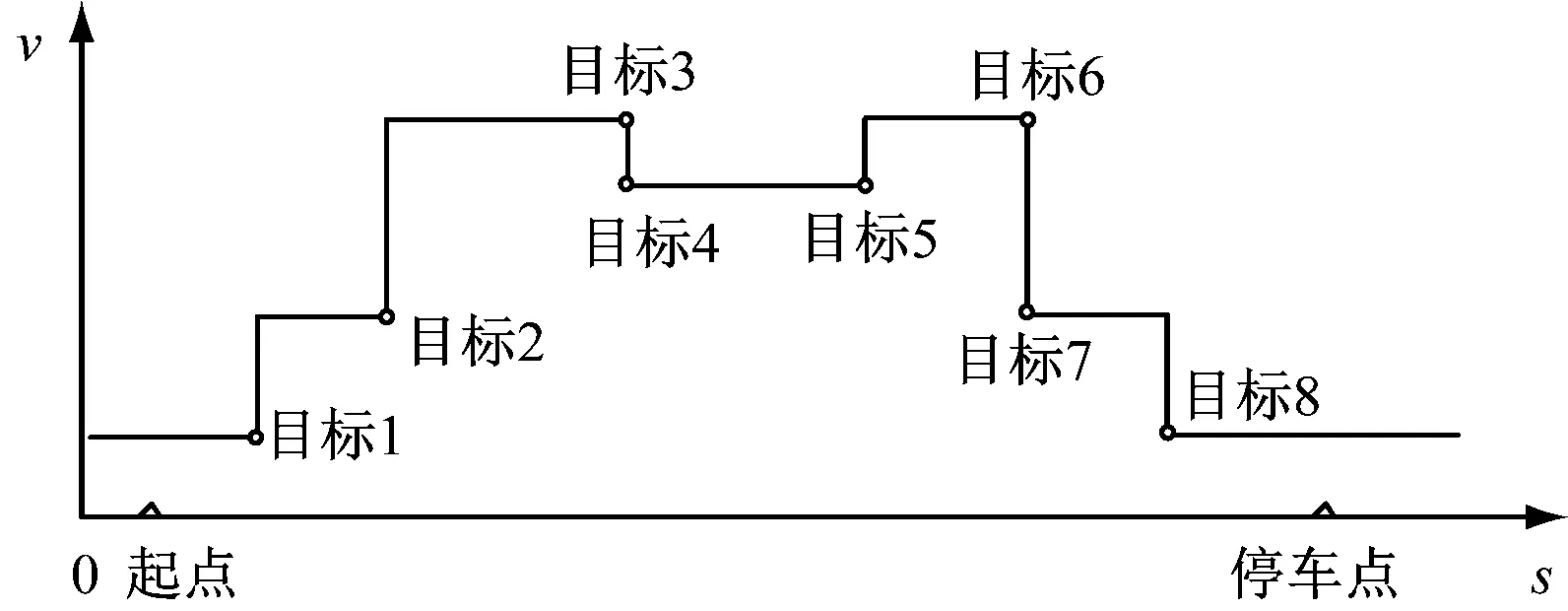
图2 列车限制速度曲线
2.2 步骤2
对步骤1中的曲线进行取点操作,获得各目标点的信息为(v,s),根据距离起点的位移s从小到大进行排序。另外,起点和停车点也是目标点(限制速度为0的点)。
2.3 步骤3
计算位移、速度基于时间的曲线,相邻的2个目标点之间为可算出一条基于t的速度、位移曲线。计算方法如下:
2.3.1 S曲线规划
判断方法为:通过目标点速度和当前速度及下1个目标点速度之间的高低对比来判断曲线的走势。如果目标点的速度比当前点的速度高,比下1个目标点的速度高,如图2的目标点2、目标点3和目标点4,其关系为上升下降曲线;如果目标点的速度等于当前点的速度,如图2的目标点4和目标点5,其关系为水平曲线;如果目标点的速度比当前点的速度低,比下1个目标点的速度低,如图2的目标点7和目标点8,其关系为下降曲线。
2.3.2 计算各段曲线的临界值
根据起点和目标点的速度差值和位移差值,判断2点间S曲线加减速7个阶段中共包含几段曲线,并计算出各段曲线的临界值。
2.3.2.1 上升曲线
如图3所示,从起点到目标点,S曲线规划可能出现以下4种情况:① 当列车以固定加加速度经过加加速、匀加速、减加速阶段后运行速度达到目标点速度时,如果走行距离小于目标点位移,其运行曲线如图3 a)所示;如果走行距离等于目标点位移,其运行曲线如图3 c)所示;② 当目标速度比较小,列车只需要经过加加速、减加速即可达到目标速度时,如果走行距离小于目标点位移,其运行曲线如图3 b)所示;如果走行距离等于目标点位移,其运行曲线如图3 d)所示。
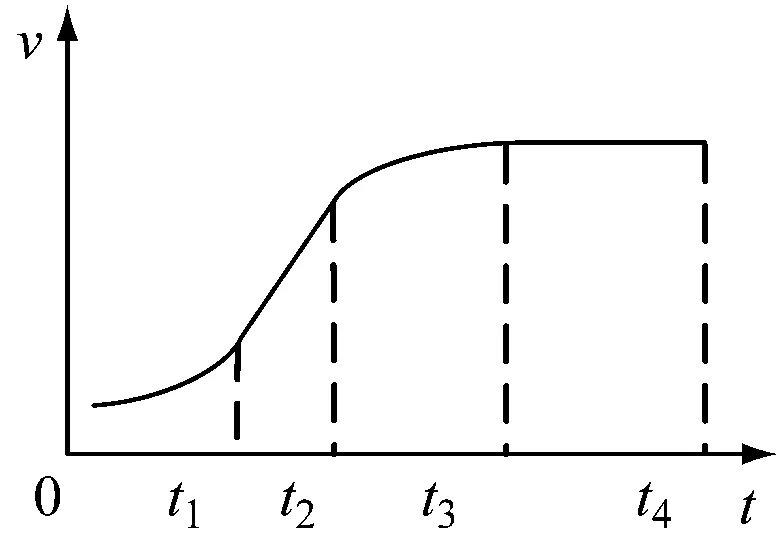
a) 四段曲线
c) 三段曲线2
如果以当前设定的最大加速度amax、加加速度J运行至运行速度达到目标点速度时,列车运行位移大于目标点位移,则应舍弃该目标点,重新进行S曲线规划。
2.3.2.2 上升下降曲线
上升下降曲线包含上升曲线和下降曲线2部分。以图2为例,从目标点2开始,列车依据S曲线加减速控制方法加速,当速度达到目标点3的速度后,再依据S曲线加减速控制方法减速至目标点4的速度,此时可能会出现以下情况:① 如果位移s小于目标点4的位移,则存在匀速段;② 如果位移s大于目标点4的位移,则递减目标点3的速度,直到位移s小于等于目标点4的位移;③ 如果速度减到小于目标点4速度,则应舍弃目标点3,重新进行S曲线规划。
2.3.2.3 水平曲线和下降曲线
水平曲线只包含S曲线的匀速阶段,如图2的目标点4至目标点5区段。
下降曲线如图2中的从目标点8到停车点区段,如图4所示,此时S曲线规划可能出现以下3种情况:① 当列车以固定加加速度经过加减速、匀减速、减减速阶段后运行速度达到目标点速度时,如果走行距离小于目标点位移,其运行曲线如图4 a)所示;② 如果走行距离等于目标点位移,其运行曲线如图4 b)所示;③ 当目标速度比较小,列车只经过加减速、减减速即可达到目标速度时,此时走行距离小于目标点位移,其运行曲线如图4 c)所示。

a) 四段曲线
c) 三段曲线2
如果以当前设定的最大加速度amax、加加速度J运行至运行速度为0时,列车运行位移超过停车点位移,则舍弃目标点8,重新进行S曲线规划。
2.4 步骤4
根据列车位置代入步骤3所计算的s基于时间t的曲线,获得t,再把t代入s,基于时间t的曲线求得v。
2.5 步骤5
根据步骤4获得的v对列车进行加减速控制。
3 结语
本文对FAO模式下城市轨道交通列车运行的S曲线加减速控制方法进行研究。在实际运营中,该研究可提高列车运行的稳定性,提升乘客的乘坐舒适度。此外,此研究可减缓机械设备冲击性,降低机械设备的磨损及设备的噪声,从而延长设备的使用寿命。